一种成像系统及方法与流程
本技术涉及图像采集,具体而言,涉及一种成像系统及成像方法。
背景技术:
1、成像系统的分辨能力同时受镜头和探测器(ccd或cmos)限制。镜头因其口径不可能无限大而受到衍射极限的限制,探测器因其像元不可能无限小而受到采样极限的限制。
2、在成像系统中,以瑞利判据为例,镜头的分辨角为
3、
4、其中λ为工作波长,d为镜头口径。则镜头在像面上可分辨的最小尺寸为
5、
6、其中f为镜头焦距,f为镜头光圈数。1.22λf即为像面艾里斑半径。根据奈奎斯特采样定理,当像面采样率低于艾里斑半径空间频率的两倍,即两倍像元尺寸大于艾里斑半径,即
7、2p>1.22λf
8、时,成像系统分辨力主要受限于探测器采样率。上式中p为像元尺寸。
9、为了使成像质量更优,在成像系统中通常会让镜头口径尽可能地大,同时像元不能太小以保证像元质量。因此,目前许多大口径成像系统的分辨力主要因触及采样极限而无法进一步提升。
10、目前提升成像采样率的方式主要分为两类,一类为直接从硬件角度对采样密度进行提升,另一类从算法角度进行超采样。
11、其中,硬件提升的方式通常为减小像元尺寸以提高采样密度,此方法成本极高,且过度减小像元尺寸会影响单像元的成像质量。亦有方案将像面在拍摄中进行亚像元尺度的抖动,从而获取到像素之间的信息,但该方案对像元的运动精度控制要求在亚微米量级,成本难以控制。
12、纯算法类的基础超采样由于缺乏光学原理的支撑,其超采样效果并没有特别显著的提升;而基于深度学习的超采样方式虽然理论上可达到不错的超采样效果,但均需要超高数据量的训练集与庞大的调参工作量。
技术实现思路
1、为了至少克服现有技术中的上述不足,本技术的目的在于提供一种成像系统及方法。
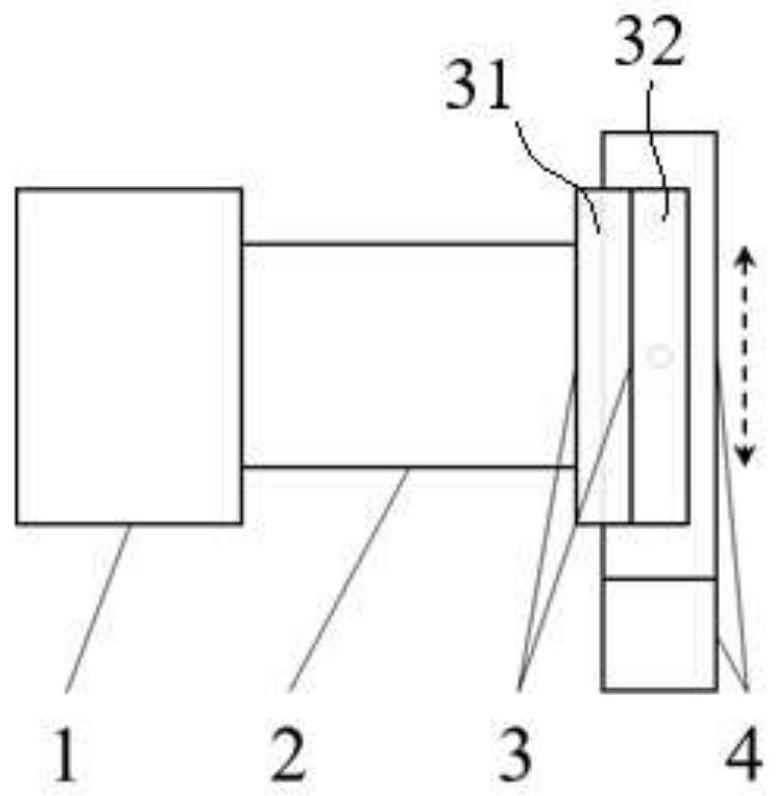
2、第一方面,本技术实施例提供一种成像系统,包括探测器和成像透镜组件,探测器位于成像透镜组件的像面,其特征在于:还包括
3、衍射组件,衍射组件包括位于成像透镜组件前方且相邻设置的第一衍射光学元件和第二衍射光学元件,
4、第一衍射光学元件与第二衍射光学元件可产生垂直于光轴方向的相对移动,以使被测目标的像在像面产生偏移。
5、在一种可能的实现方式中,第一衍射光学元件和第二衍射光学元件均为二次相位型衍射光学元件,且第一衍射光学元件与第二衍射光学元件的工作区域的相位相反,
6、工作区域是第一衍射光学元件和第二衍射光学元件的能始终覆盖成像透镜组件入瞳的区域。
7、在一种可能的实现方式中,第一衍射光学元件位于成像透镜组件与第二衍射光学元件之间,其中
8、第一衍射光学元件可产生垂直于光轴方向的移动,第一衍射光学元件的工作区域的直径d11满足如下关系式
9、d2+δumax<d11
10、其中,δumax为第一衍射光学元件的最大移动距离,d2为成像透镜组件的通光口径,
11、第二衍射光学元件的工作区域的直径d12满足如下关系式
12、d2<d12;
13、或
14、第二衍射光学元件可产生垂直于光轴方向的移动,第二衍射光学元件的工作区域直径d12满足如下关系式
15、d2+δumax<d12
16、其中,δumax为第二衍射光学元件的最大移动距离,d2为成像透镜组件的通光口径,
17、第一衍射光学元件的工作区域直径d11满足如下关系式
18、d2<d11。
19、
20、在一种可能的实现方式中,第一衍射光学元件与第二衍射光学元件之间相对移动的距离δu与被测目标的像在像面偏移的距离δh满足如下关系式
21、δh=δu·a·λ·f/π
22、其中,
23、λ为入射光的波长,
24、a为第一衍射光学元件和/或第二衍射光学元件在λ波长下的二次项系数,
25、f为成像透镜组件的焦距;
26、第一衍射光学元件与第二衍射光学元件中与成像透镜组件相邻的一者与成像透镜组件的入瞳之间的距离d2满足如下关系式
27、0<d2<4d1
28、其中,d1为第一衍射光学元件或第二衍射光学元件的工作区域的直径。
29、在一种可能的实现方式中,参数a满足如下关系式
30、0.01rad·mm-2<a<100rad·mm-2。
31、
32、在一种可能的实现方式中,参数δh满足如下关系式
33、δh<10p
34、其中,p为探测器的像元尺寸。
35、第二方面,本技术实施例还提供一种成像方法,应用于包含成像透镜组件和探测器的成像系统,成像透镜组用于收集经被测目标反射和/或散射的光并提供给探测器;探测器用于根据成像透镜组件收集的光形成对被测目标的采集图像;其特征在于:
36、通过使用可产生垂直于光轴方向的相对移动的第一衍射光学元件与第二衍射光学元件来调节被测目标的像在探测器的像面的位置,以获取不同的采集图像;
37、其中,第一衍射光学元件和第二衍射光学元件位于成像透镜组件的前方且相邻设置。本技术实施例中,前方是被测目标所在的方向。
38、在一种可能的实现方式中,使第一衍射光学元件相对于第二衍射光学元件沿着垂直入射光方向的平面移动至少两次,每次移动后使被测目标的像在探测器的像面产生小于探测器像元尺寸的偏移;
39、在移动前及每次移动结束后使探测器对被测目标进行一次图像采集,得到多张采集图像;
40、对多张采集图像进行像素融合生成超采样图像。
41、在一种可能的实现方式中,根据预设的超采样的倍数确定图像采集次数。
42、在一种可能的实现方式中,图像采集次数n满足如下关系式
43、n=n2
44、其中,n为预设的超采样的倍数;
45、第一衍射光学元件的在预设范围内移动,以使被测目标的像在探测器的像面产生的偏移在探测器的10个像元范围内。
46、在一种可能的实现方式中,在预设范围设定n个拍摄点,n个拍摄点形成n*n的等间隔矩阵;
47、控制第一衍射光学元件按照预设路径移动以使第一衍射光学元件上的特定点遍历n个拍摄点,每到一个拍摄点探测器对被测目标进行一次图像采集。
48、在一种可能的实现方式中,第一衍射光学元件和第二衍射光学元件均为二次相位型衍射光学元件,且第一衍射光学元件与第二衍射光学元件的工作区域的相位相反,
49、工作区域是第一衍射光学元件和第二衍射光学元件的能始终覆盖成像透镜组件入瞳的区域。
50、基于上述任意一个方面,本技术实施例提供的成像系统、成像方法,通过采用可产生垂直于光轴方向的相对移动的第一衍射光学元件和第二衍射光学元件,使被测目标的像在像面产生偏移,从而可以利用该原理实现超采样,本技术实施的技术方案从物理层实现亚像素超采样,具有更真实的超采样效果;相对于纯算法的超采样,本技术实施的技术方案对超分辨成像的效果更加显著;而相对于其他物理层的亚像素超采样方案,本技术实施的技术方案可显著降低探测器端的采样压力,且无需亚像素级精度的运动控制,硬件成本有效降低。
- 还没有人留言评论。精彩留言会获得点赞!