一种显微镜自动对焦方法、终端和系统与流程
本发明涉及图像处理,尤其涉及一种显微镜自动对焦方法、终端和系统。
背景技术:
1、显微镜自动对焦技术在现代科学研究和医学诊断中扮演着重要的角色,因为它赋予显微镜能力,无需人工干预,就能够在微观世界中捕捉清晰、高质量的图像。这项技术的背景源于科学研究对高分辨率显微镜图像的日益需求,以及计算机视觉、深度学习和自动化技术的飞速发展。自动对焦技术不仅提高了图像采集的效率,还减轻了操作者的负担,为微观观察提供了更广泛和精确的应用领域。
2、现有的显微镜自动对焦方法是在物镜平台的可移动范围内,逐步移动物镜平台并计算每个位置的图像清晰度,然后在移动结束后,选择清晰度最高的位置作为对焦位置。这种方法存在两个问题:一是物镜平台的移动过程中,可能会超过真正的对焦位置,导致不必要的时间浪费;二是清晰度最高的位置并不一定是最佳的对焦位置,有时候最佳的对焦位置在清晰度最高位置的附近区域,对焦的准确度较低。
技术实现思路
1、本发明实施例提供一种显微镜自动对焦方法、终端和系统,以提高显微镜自动对焦的效率和准确率。
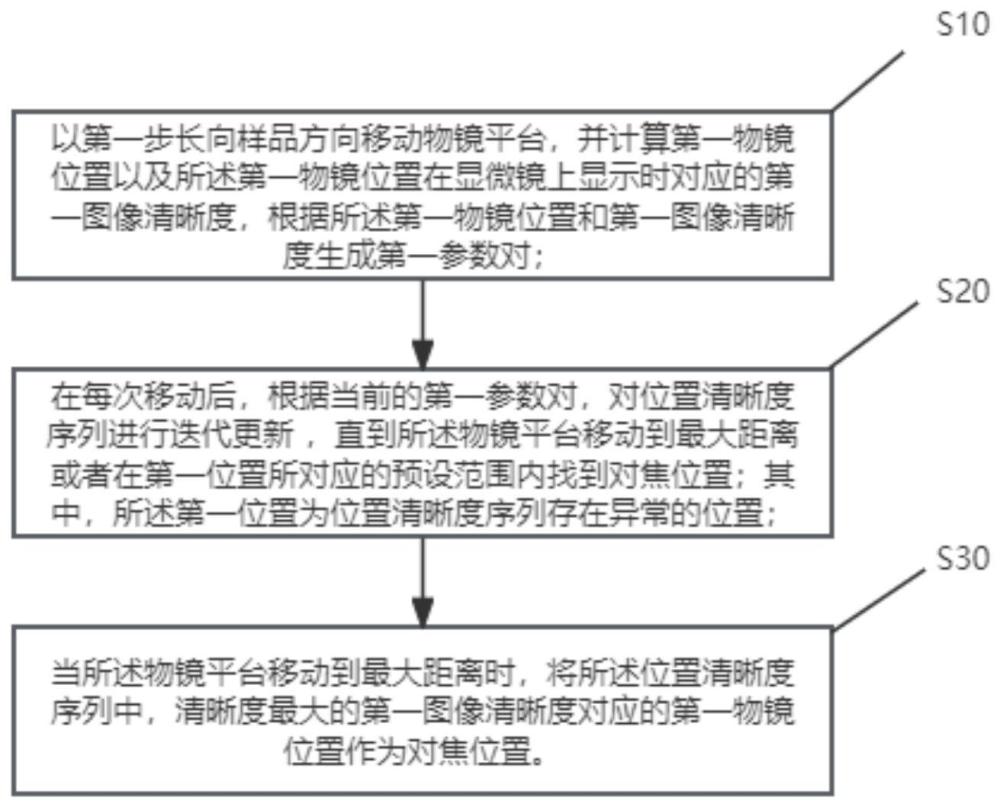
2、为了实现上述目的,本发明实施例提供一种显微镜自动对焦方法,包括:以第一步长向样品方向移动物镜平台,并计算第一物镜位置以及所述第一物镜位置在显微镜上显示时对应的第一图像清晰度,根据所述第一物镜位置和第一图像清晰度生成第一参数对;
3、在每次移动后,根据当前的第一参数对,对位置清晰度序列进行迭代更新,直到所述物镜平台移动到最大距离或者在第一位置所对应的预设范围内找到对焦位置;其中,所述第一位置为位置清晰度序列存在异常的位置;
4、当所述物镜平台移动到最大距离时,将所述位置清晰度序列中,清晰度最大的第一图像清晰度对应的第一物镜位置作为对焦位置。
5、与现有技术相比,本发明实施例的有益效果在于:
6、允许显微镜系统自动对焦,无需人工干预,可以提高显微镜操作的效率;先查找第一参数对存在异常的第一物镜位置,再在所述第一物镜位置对应的预设范围进一步查找对焦位置,可以更加精细地查找到正确的对焦位置;查找到对焦位置即停下物镜平台,而不是遍历整个物镜平台活动范围,可以提高自动对焦的效率。
7、可选地,所述在第一位置所对应的预设范围内找到对焦位置,具体为:
8、在预设范围内,从离样品最远的位置开始,以第二步长向样品方向移动物镜平台,在每次移动所述物镜平台后,采集第一图像,以所述第一图像更新待处理图像,基于所述第一学习模型判别所述待处理图像是否为对焦图像,直至查找到对焦位置或所述物镜平台移动后的位置超出预设范围;其中,所述对焦位置为对焦图像对应的物镜平台位置;所述预设范围为以第一位置为中点,长度为第一步长两倍的线段;所述第一学习模型是通过将若干对焦图片和非对焦图片,输入离线深度学习模型进行训练得到的。
9、实施本可选项,通过在预设范围内使用第二步长移动物镜平台,可以更精细地搜索对焦位置,从而提高自动对焦的精确度;当待处理图像为对焦图像时就停止移动物镜平台,而不是遍历整个物镜平台可移动范围,可以节省时间和能源。
10、可选地,在所述在每次移动后,根据当前的第一参数对,对位置清晰度序列进行迭代更新之前,还包括:
11、通过ransac算法对当前的第一参数对进行拟合,得到第一距离;通过ransac算法对位置清晰度序列中的各个第一参数进行拟合,得到若干待处理距离;计算所述若干待处理距离的平均值,得到第二距离;当所述第一距离大于所述第二距离的三倍时,以所述第一距离对应的物镜平台位置为第一位置。
12、实施本可选项,ransac算法是一种鲁棒的估计方法,能够有效地处理包含离群值的数据,在对第一物镜参数进行迭代计算时,使用ransac可以提高对焦位置的鲁棒性,从而减少由于噪声或异常值引起的错误估计。
13、可选地,所述根据当前的第一参数对,对位置清晰度序列进行迭代更新,具体为:
14、调用所述位置清晰度序列的数据结构对应的填充函数,以将所述第一参数对添加至所述位置清晰度序列,从而对所述位置清晰度序列进行迭代更新。
15、可选地,所述基于所述第一学习模型判别所述待处理图像是否为对焦图像,具体为:
16、对所述待处理图像进行归一化处理和特征提取,生成第二图像;基于所述第一学习模型对所述第二图像进行二分类判别。
17、相应的,本发明实施例还提供一种显微镜自动对焦终端,包括:数据采集模块、迭代对焦模块和直接对焦模块;
18、其中,所述数据采集模块用于以第一步长向样品方向移动物镜平台,并计算第一物镜位置以及所述第一物镜位置在显微镜上显示时对应的第一图像清晰度,根据所述第一物镜位置和第一图像清晰度生成第一参数对;
19、所述迭代对焦模块用于在每次移动后,根据当前的第一参数对,对位置清晰度序列进行迭代更新,直到所述物镜平台移动到最大距离或者在第一位置所对应的预设范围内找到对焦位置;其中,所述第一位置为位置清晰度序列存在异常的位置;
20、所述直接对焦模块用于当所述物镜平台移动到最大距离时,将所述位置清晰度序列中,清晰度最大的第一图像清晰度对应的第一物镜位置作为对焦位置。
21、与现有技术相比,本发明实施例的有益效果在于:
22、允许显微镜系统自动对焦,无需人工干预,可以提高显微镜操作的效率;先查找第一参数对存在异常的第一物镜位置,再在所述第一物镜位置对应的预设范围进一步查找对焦位置,可以更加精细地查找到正确的对焦位置;查找到对焦位置即停下物镜平台,而不是遍历整个物镜平台活动范围,可以提高自动对焦的效率。
23、可选地,所述在第一位置所对应的预设范围内找到对焦位置,具体为:
24、在预设范围内,从离样品最远的位置开始,以第二步长向样品方向移动物镜平台,在每次移动所述物镜平台后,采集第一图像,以所述第一图像更新待处理图像,基于所述第一学习模型判别所述待处理图像是否为对焦图像,直至查找到对焦位置或所述物镜平台移动后的位置超出预设范围;其中,所述对焦位置为对焦图像对应的物镜平台位置;所述预设范围为以第一位置为中点,长度为第一步长两倍的线段;所述第一学习模型是通过将若干对焦图片和非对焦图片,输入离线深度学习模型进行训练得到的。
25、实施本可选项,通过在预设范围内使用第二步长移动物镜平台,可以更精细地搜索对焦位置,从而提高自动对焦的精确度;当待处理图像为对焦图像时就停止移动物镜平台,而不是遍历整个物镜平台可移动范围,可以节省时间和能源。
26、可选地,在所述在每次移动后,根据当前的第一参数对,对位置清晰度序列进行迭代更新之前,还包括:
27、通过ransac算法对当前的第一参数对进行拟合,得到第一距离;通过ransac算法对位置清晰度序列中的各个第一参数进行拟合,得到若干待处理距离;计算所述若干待处理距离的平均值,得到第二距离;当所述第一距离大于所述第二距离的三倍时,以所述第一距离对应的物镜平台位置为第一位置。
28、实施本可选项,ransac算法是一种鲁棒的估计方法,能够有效地处理包含离群值的数据,在对第一物镜参数进行迭代计算时,使用ransac可以提高对焦位置的鲁棒性,从而减少由于噪声或异常值引起的错误估计。
29、可选地,所述根据当前的第一参数对,对位置清晰度序列进行迭代更新,具体为:
30、调用所述位置清晰度序列的数据结构对应的填充函数,以将所述第一参数对添加至所述位置清晰度序列,从而对所述位置清晰度序列进行迭代更新。
31、可选地,所述基于所述第一学习模型判别所述待处理图像是否为对焦图像,具体为:
32、对所述待处理图像进行归一化处理和特征提取,生成第二图像;基于所述第一学习模型对所述第二图像进行二分类判别。
33、相应的,本发明实施例还提供一种显微镜自动对焦系统,包括:终端和显微镜;
34、其中,所述显微镜包括:物镜平台;所述终端预设在所述显微镜上;
35、所述终端用于执行上述任意一项所述的一种显微镜自动对焦方法。
- 还没有人留言评论。精彩留言会获得点赞!