一种应用于星间激光通信的压电陶瓷偏转镜控制系统的制作方法
本发明属于激光通信领域,涉及一种应用于星间激光通信的压电陶瓷偏转镜控制系统。
背景技术:
1、激光通信具有通信频带宽、通信速率高、抗干扰能力强、保密性好等诸多优点,近年来随着国内外星座组网计划的迅猛发展,对星间通信带宽提出更高的要求,因而星间激光通信受到广泛关注,得到了巨大的发展,成为当前最具潜力的星间高速通信技术发展方向之一。星间激光通信系统具有高通信速率和低误码率的特点,然而在实际应用中激光通信系统会受到卫星等搭载平台振动、热效应、大气湍流等因素的影响,使得空间光路的高精度捕获跟踪和高效稳定的单模光纤耦合非常困难,这对星间激光通信视轴的稳定控制提出了极高要求。压电陶瓷偏转镜控制系统就是为实现高精度的通信视轴稳定控制而设计的。
2、空间光路的高精度捕获跟踪和高效稳定的单模光纤耦合是星间激光通信系统的一项关键技术指标,很大程度上决定了整个星间激光通信系统的通信性能,这就要求在激光通信系统里压电陶瓷偏转镜控制系统要具有精密定位的控制特性。但压电陶瓷偏转镜具有迟滞特性,若要对其进行精密定位控制,设计控制系统时必须对其特性进行考虑。
3、常规的压电陶瓷偏转镜控制技术有电压式和电流式两种方法,电压式是利用压电陶瓷的输出位移与施加在其两端的电压满足近似线性关系的原理,通过控制两端的电压控制输出位移;电流式是依据压电陶瓷的输出位移与驱动电压不成正比,而是与其两端的电荷近似成正比的原理来控制的。无论电压式还是电流式,要使压电陶瓷满足定位精度,都必须同一定的控制算法相结合,控制算法有:pid控制、前馈控制、模糊控制、自适应控制、神经网络控制以及多种方法结合起来的复合控制。但现阶段压电陶瓷偏转镜驱动控制上还存在响应差、稳定性差、伺服带宽低、动态范围小等问题,压电陶瓷偏转镜控制系统的精密定位受到了极大的限制。因此,有必要对现有技术进行改进。
技术实现思路
1、本发明提供了一种应用于星间激光通信的压电陶瓷偏转镜控制系统
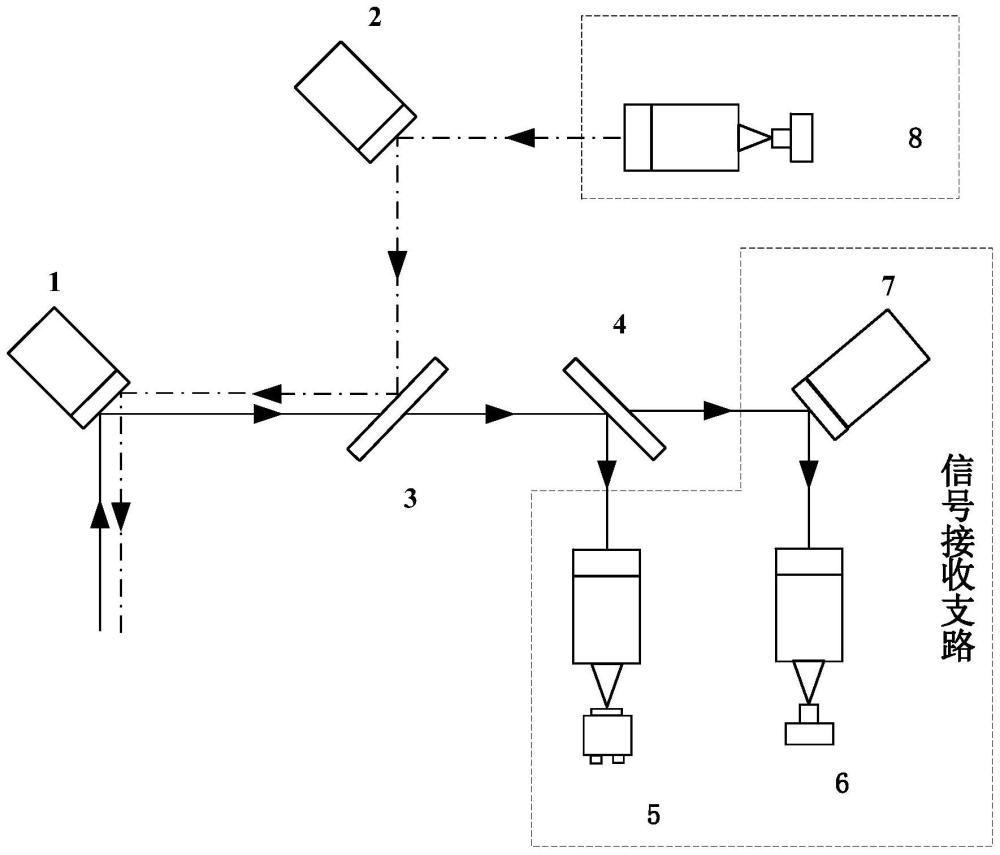
2、一种应用于星间激光通信的压电陶瓷偏转镜控制系统,其特征在于,所述控制系统包括:精跟踪执行机构、提前瞄准执行机构、信号接收支路、激光发射器、第一分光镜和第二分光镜;精跟踪执行机构接收外部激光,将外部激光分别通过第一分光镜和第二分光镜传递至信号接收支路;信号接收支路根据所接收到的外部激光向精跟踪执行机构发送视场区域调整信号;所述精跟踪执行机构根据视场区域调整信号调整视场区域;所述激光发射器向提前瞄准执行机构发射内部激光;所述提前瞄准执行机构将来自激光发射器的内部激光通过第一分光镜及精跟踪执行机构传递至外部;所述外部激光和内部激光出入同轴。
3、优选地,所述信号接收支路包括:跟踪探测器,接收来自第二分光镜的外部激光,并根据外部激光向精跟踪执行机构发送视场区域调整信号;章动执行机构,接收并反射来自第二分光镜的外部激光;激光接收器,接收来自章动执行机构的外部激光。
4、优选地,所述第一分光镜为偏振分光镜;第二分光镜为能量分光镜。
5、优选地,所述精跟踪执行机构、提前瞄准执行机构、章动执行机构内部均设置压电陶瓷偏转镜。优选地,所述精跟踪执行机构、提前瞄准执行机构、章动执行机构内部内部均设置有x轴和y轴两个自由度的二维轴系偏转单元;所述二维轴系偏转单元固定在精跟踪执行机构的运动面上;所述跟踪探测器根据外部激光向精跟踪执行机构发送视场区域调整信号,实现视场区域的调整。
6、优选地,所述压电陶瓷偏转镜驱动电路为电压驱动;压电陶瓷偏转镜采用的是s-331型器件。
7、优选地,所述视场区域的调整包括计算光斑位置和标定法计算光斑位置和标定法;所述计算光斑位置包括:
8、
9、其中,xi、yi为所计算的光斑质心位置;光斑的功率分布函数为高斯分布或艾利分布,光斑覆盖的区域为m×n个像元,xmn、ymn分别为像元的坐标位置;imn为像元的光强;所述标定法包括:步骤一,精跟踪执行机构以最小步长运动;步骤二,记录下跟踪探测器上精跟踪执行机构最小步长所对应的像元变化量;步骤三,不断重复得出跟踪探测器精跟踪范围内,步长与像元的对应关系;步骤四,根据插值的方法,根据光斑位置的变化求得精跟踪执行机构的执行量,向精跟踪执行机构发送视场区域调整信号。
10、优选地,所述控制系统还设置有一驱动控制电路;所述驱动控制电路包括:主控制器,三个执行机构驱动电路以及一个通讯电路,所述主控制器分别与三个执行机构驱动电路以及一个通讯电路连接;其中,所述通讯电路设置于跟踪探测器内,用于获取跟踪探测器的跟踪信号;三个所述执行机构驱动电路分别设置于精跟踪执行机构、提前瞄准执行机构、章动执行机构内部,用于接收其反馈量,并将其转化为数字化反馈量;所述主控制器接收来自通讯电路的跟踪信号和执行机构驱动电路的数字化反馈量,根据跟踪信号和数字化反馈量得到控制指令后,将控制指令发送给执行机构驱动电路;所述执行机构驱动电路接收到来自控制指令后,根据控制指令实现对跟踪执行机构、提前瞄准执行机构、章动执行机构的自闭环驱动控制。
11、优选地,所述执行机构驱动电路包括dac电路、adc电路、功率驱动电路、反馈电路、自闭环电路;所述反馈电路与adc电路连接,反馈电路接收执行机构的反馈量,处理得到放大反馈量,并将放大反馈量输出至adc电路;所述adc电路与主控制器信号连接,adc电路接收来自反馈电路的放大反馈量后,对其进行模数转换,得到数字化反馈量,输出至主控制器;所述主控制器还与dac电路连接,处理来自adc电路的数字化反馈量和来自通讯电路的跟踪信号,获得用于控制执行机构的控制指令后,向dac电路发送控制指令;所述dac电路还分别与功率驱动电路和自闭环电路连接,dac电路接收来自主控制器的控制指令,对控制指令进行数模转换,得到模拟控制量;并输出模拟控制量至功率驱动电路和自闭环电路;所述自闭环电路还与反馈电路连接,自闭环电路接收反馈电路输出的放大反馈量与dac电路输出的模拟控制量后,经过信号调理,直接对执行机构驱动控制;并在驱动过程中不断将信号发送给功率驱动电路;所述功率驱动电路还与自闭环电路连接,功率驱动电路接收dac电路输出的模拟控制量和自闭环电路输出的信号,实现输出大量程驱动电压驱动对应的执行机构。
12、优选地,自闭环电路为模拟pid闭环;主控制器为fpga;通讯电路为rs422形式。
13、本发明与现有技术相比的优点在于:
14、(1)本发明控制系统包括精跟踪执行机构、提前瞄准执行机构、章动执行机构、跟踪探测器和分光镜,首次引入精跟踪视场和章动视场下的高精度复合跟踪方法,为实现激光信号的高精度捕获跟踪和高效稳定的单模光纤耦合的目标,提供了解决方案。
15、(2)本发明控制系统,在三组压电陶瓷偏转镜和焦平面阵列探测器的星间激光通信架构下,基于模拟pid(proportional、integral、derivative,比例、积分、微分)反馈闭环的电压式压电陶瓷偏转镜驱动控制技术,解决了压电陶瓷偏转镜控制系统的快速精密定位问题,其中,定位精度优于3μrad,控制频率约为1khz。
16、(3)本发明控制系统为实现对目标的发现和提前指向的功能创造了条件,这使得收发光路一体化设计,有效了降低系统的体积、质量和光路的复杂度。
17、(4)本发明控制系统作用于星间激光通信终端接收端,控制接收空间激光到单模光纤的耦合。系统正常工作时,有效地抑制了卫星等搭载平台振动、热效应、大气湍流等因素的影响引起的耦合效率下降,具有定位精度高、扫描速度快、抑制平台振动能力强等特点,在实际的应用中具有重要的应用价值。
18、(5)本发明提供了一种应用于星间激光通信的压电陶瓷偏转镜控制系统,解决压电陶瓷偏转镜控制系统的快速精密定位问题,为实现激光信号的高精度捕获跟踪和高效稳定的单模光纤耦合的目标,提供了前提条件。
- 还没有人留言评论。精彩留言会获得点赞!