光栅发生器及包括该光栅发生器的视觉装置的制作方法
本技术涉及一种光栅发生器及包括该光栅发生器的视觉装置,属于泊车场景识别。
背景技术:
1、对泊车场景的识别是指通过传感器的探测来对车辆周边环境进行感知进而获取到车位以及障碍物的位置信息,以便后续完成安全高效的自动泊车。目前用于进行自动泊车场景识别的传感器包括超声波雷达、摄像头、毫米波雷达以及激光雷达,这些均能在一定条件下实现对自动泊车场景的识别,但在使用时各自都存在不可忽视的局限性。
2、其中,激光雷达和毫米波雷达的精度高但成本也很高,而在汽车行业竞争愈加激烈的今天,成本问题至关重要;超声波雷达成本低但精度低,且存在目前无法解决的同频干扰的问题;摄像头成本低但同样感知精度低,且由于设置在待检测区域的障碍物的数据量的不足,视觉感知在环境适应性的表现上差强人意。
3、综上,在泊车场景的识别中,现有的光栅发生器存在成本过高、结构复杂、难以产生能够增大障碍物在视觉成像中的有效数据量的有效光栅,导致精度低的问题。
4、例如,中国专利zl201910945127.3公开的一种采用调制激光扫描技术的空间编码光栅发生器,同样存在难以在泊车场景的识别中产生能够增大障碍物在视觉成像中的有效数据量的有效光栅的问题。
5、鉴于此,有必要提供一种低成本的光栅发生器及包括该光栅发生器的视觉装置,为实现高精度识别自动泊车场景且环境适应性较高的识别装置提供有效光栅作为基础。上述问题是在光栅发生器及包括该光栅发生器的视觉装置的设计与生产过程中应当予以考虑并解决的问题。
技术实现思路
1、本实用新型的目的是提供一种光栅发生器及包括该光栅发生器的视觉装置解决现有技术中存在的成本较高或难以产生能够增大泊车场景的识别中障碍物在视觉成像中有效数据量的有效光栅的问题。
2、本实用新型的技术解决方案是:
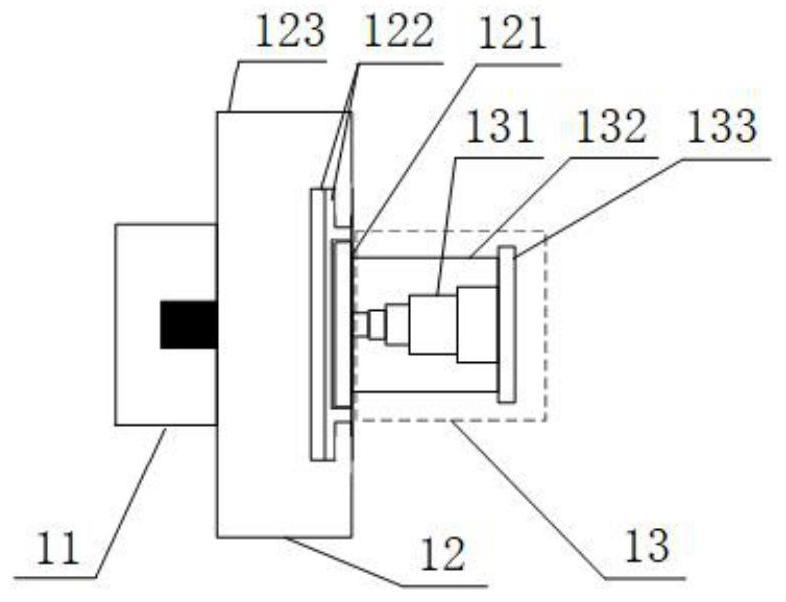
3、一种光栅发生器,包括固体激光器和透镜单元,包括用于在泊车场景的识别的待检测区域产生光栅网格的光栅镜片单元,光栅镜片单元的两端分别设有透镜单元和用于提供点光源的固体激光器,光栅镜片单元包括用于将点光源产生的光线变为网格化的光栅线条的光栅镜片、光栅挡圈和光栅安装圈,光栅镜片设于光栅安装圈内并由光栅挡圈固定。
4、进一步地,透镜单元包括透镜组、镜筒和光栏挡圈,透镜组设于镜筒内并由光栏挡圈加固。
5、一种视觉装置,包括光栅发生器、车载摄像头和处理单元,光栅发生器采用上述任一项所述的光栅发生器。
6、进一步地,光栅发生器安装在以车载摄像头为圆心、半径大于4cm且小于10cm的圆环区域内。
7、进一步地,光栅发生器的中心轴线与车载摄像头的镜头中心轴线的俯仰夹角θ大于0°且小于90°。
8、进一步地,光栅发生器用于对泊车场景识别区域覆盖光栅网格,车载摄像头连接处理单元,车载摄像头将覆盖光栅网格的区域的视频信息发送给处理单元。
9、本实用新型的有益效果是:该种光栅发生器及包括该光栅发生器的视觉装置,使用在泊车场景的识别中,通过设置光栅镜片单元,能够在待检测区域产生光栅网格,由光栅网格实现对泊车场景中障碍物的增强,并实现增大障碍物在视觉成像中的有效数据量,提高了对复杂泊车环境的适应性。且低成本、体积小且结构简洁。
技术特征:
1.一种光栅发生器,包括固体激光器和透镜单元,其特征在于:包括用于在泊车场景的识别的待检测区域产生光栅网格的光栅镜片单元,光栅镜片单元的两端分别设有透镜单元和用于提供点光源的固体激光器,光栅镜片单元包括用于将点光源产生的光线变为网格化的光栅线条的光栅镜片、光栅挡圈和光栅安装圈,光栅镜片设于光栅安装圈内并由光栅挡圈固定。
2.如权利要求1所述的光栅发生器,其特征在于:透镜单元包括透镜组、镜筒和光栏挡圈,透镜组设于镜筒内并由光栏挡圈加固。
3.一种视觉装置,其特征在于:包括光栅发生器、车载摄像头和处理单元,光栅发生器采用权利要求1或2所述的光栅发生器。
4.如权利要求3所述的视觉装置,其特征在于:光栅发生器安装在以车载摄像头为圆心、半径大于4cm且小于10cm的圆环区域内。
5.如权利要求3所述的视觉装置,其特征在于:光栅发生器的中心轴线与车载摄像头的镜头中心轴线的俯仰夹角θ大于0°且小于90°。
6.如权利要求3-5任一项所述的视觉装置,其特征在于:光栅发生器用于对泊车场景识别区域覆盖光栅网格,车载摄像头连接处理单元,车载摄像头将覆盖光栅网格的区域的视频信息发送给处理单元。
技术总结
本技术提供一种光栅发生器及包括该光栅发生器的视觉装置,属于泊车场景识别技术领域。该光栅发生器,包括固体激光器和透镜单元,包括用于在泊车场景的识别的待检测区域产生光栅网格的光栅镜片单元,光栅镜片单元的两端分别设有透镜单元和用于提供点光源的固体激光器,光栅镜片单元包括用于将点光源产生的光线变为网格化的光栅线条的光栅镜片、光栅挡圈和光栅安装圈,光栅镜片设于光栅安装圈内并由光栅挡圈固定;本技术使用在泊车场景的识别中,能够在待检测区域产生光栅网格,由光栅网格实现对泊车场景中障碍物的增强,并实现增大障碍物在视觉成像中的有效数据量,提高了对复杂泊车环境的适应性。且低成本、体积小且结构简洁。
技术研发人员:李仁鹏,李玥,沈里,窦银宇
受保护的技术使用者:李仁鹏
技术研发日:20230918
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!