一种机器视觉镜头的制作方法
本技术涉及光学,尤其涉及一种机器视觉镜头。
背景技术:
1、随着工业自动化的飞速发展,为满足自动化设备测量判断的准确性,机器视觉系统技术不断的升级,但是目前市场上机器视觉系统所应用的短焦(例如8mm焦距)工业镜头,若要保证大靶面需求,则会存在畸变较大、物距范围较小、边缘视场的分辨率不足以及稳定性较差等缺点。
技术实现思路
1、本实用新型提供了一种机器视觉镜头,以实现一种焦距8mm大靶面高分辨率的机器视觉镜头,并解决畸变较大、物距范围较小、边缘视场的分辨率不足以及稳定性较差等缺点。
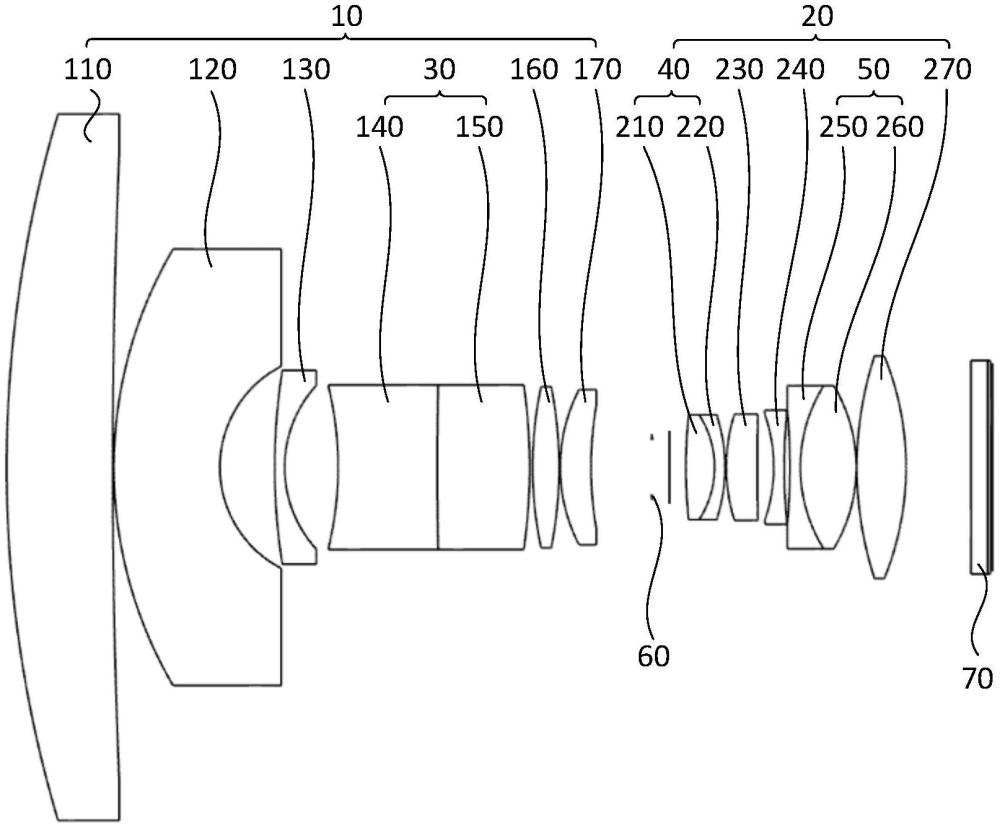
2、本实用新型提供了一种机器视觉镜头,包括沿光轴从物面至像面依次排列的前透镜群和后透镜群;
3、所述前透镜群固定设置,所述后透镜群沿所述光轴方向移动设置;
4、所述前透镜群包括从物面至像面依次排列的第一透镜、第二透镜、第三透镜、第四透镜、第五透镜、第六透镜和第七透镜;
5、所述后透镜群包括从物面至像面依次排列的第八透镜、第九透镜、第十透镜、第十一透镜、第十二透镜、第十三透镜和第十四透镜;
6、所述第四透镜和所述第五透镜组成第一胶合透镜组,所述第八透镜和所述第九透镜组成第二胶合透镜组,所述第十二透镜和所述第十三透镜组成第三胶合透镜组;
7、所述第一透镜具有正光焦度,所述第二透镜具有负光焦度,所述第三透镜具有负光焦度,所述第一胶合透镜组具有负光焦度,所述第六透镜具有正光焦度,所述第七透镜具有正光焦度,所述第二胶合透镜组具有正光焦度,所述第十透镜具有正光焦度,所述第十一透镜具有负光焦度,所述第三胶合透镜组具有负光焦度,所述第十四透镜具有正光焦度;
8、所述机器视觉镜头的光焦度为所述第一透镜的光焦度为所述第二透镜的光焦度为所述第三透镜的光焦度为所述第一胶合透镜组的光焦度为所述第六透镜的光焦度为所述第七透镜的光焦度为所述第二胶合透镜组的光焦度为所述第十透镜的光焦度为所述第十一透镜的光焦度为所述第三胶合透镜组的光焦度为所述第十四透镜的光焦度为其中:
9、
10、
11、
12、
13、可选的,所述第一透镜的物侧面为凸面,像侧面为凹面;
14、所述第二透镜的物侧面为凸面,像侧面为凹面;
15、所述第三透镜的物侧面为凸面,像侧面为凹面;
16、所述第四透镜的物侧面为凹面;
17、所述第五透镜的像侧面为凸面或凹面;
18、所述第六透镜的物侧面为凸面,像侧面为凸面;
19、所述第七透镜的物侧面为凸面,像侧面为凹面;
20、所述第八透镜的物侧面为凸面,像侧面为凸面;
21、所述第九透镜的物侧面为凹面,像侧面为凸面;
22、所述第十透镜的物侧面为凸面,像侧面为凹面;
23、所述第十一透镜的物侧面为凹面,像侧面为凹面;
24、所述第十二透镜的物侧面为凹面,像侧面为凹面;
25、所述第十三透镜的物侧面为凸面,像侧面为凸面;
26、所述第十四透镜的物侧面为凸面,像侧面为凸面。
27、可选的,所述第一透镜的折射率为n1,阿贝数为v1;所述第二透镜的折射率为n2,阿贝数为v2;所述第三透镜的折射率为n3,阿贝数为v3;所述第四透镜的折射率为n4,阿贝数为v4;所述第五透镜的折射率为n5,阿贝数为v5;所述第六透镜的折射率为n6,阿贝数为v6;所述第七透镜的折射率为n7,阿贝数为v7;所述第八透镜的折射率为n8,阿贝数为v8;所述第九透镜的折射率为n9,阿贝数为v9;所述第十透镜的折射率为n10,阿贝数为v10;所述第十一透镜的折射率为n11,阿贝数为v11;所述第十二透镜的折射率为n12,阿贝数为v12;所述第十三透镜的折射率为n13,阿贝数为v13;所述第十四透镜的折射率为n14,阿贝数为v14;其中:
28、1.58≤n1≤2.05;29.00≤v1≤62.50;
29、1.60≤n2≤2.05;49.00≤v2≤56.89;
30、1.85≤n3≤2.05;15.00≤v3≤22.97;
31、1.60≤n4≤1.85;49.00≤v4≤53.33;
32、1.80≤n5≤2.00;15.00≤v5≤30.95;
33、1.40≤n6≤1.67;32.19≤v6≤54.91;
34、1.37≤n7≤1.64;15.00≤v7≤60.46;
35、1.43≤n8≤1.78;36.75≤v8≤82.61;
36、1.70≤n9≤1.90;27.38≤v9≤48.71;
37、1.45≤n10≤1.67;20.28≤v10≤64.41;
38、1.76≤n11≤2.05;15.00≤v11≤26.43;
39、1.80≤n12≤2.05;15.00≤v12≤26.43;
40、1.40≤n13≤1.56;65.33≤v13≤95.00;
41、1.80≤n14≤2.05;18.60≤v14≤36.25。
42、可选的,所述第一透镜、所述第二透镜、所述第三透镜、所述第四透镜、所述第五透镜、所述第六透镜、所述第七透镜、所述第八透镜、所述第九透镜、所述第十透镜、所述第十一透镜、所述第十二透镜、所述第十三透镜和所述第十四透镜均为玻璃球面透镜。
43、可选的,所述第一透镜的物侧面的曲率半径为c1,所述第四透镜的物侧面的曲率半径为c7,所述第五透镜的像侧面的曲率半径为c9,所述第六透镜的像侧面的曲率半径为c11,所述第七透镜的物侧面的曲率半径为c12,所述第八透镜的物侧面的曲率半径为c16,所述第十透镜的物侧面的曲率半径为c19,所述第十二透镜的物侧面的曲率半径为c23,其中:
44、c1>46.05,c7<-25.35,c9>-52.90,c11<-35.01,c12>13.45,c16<46.48,c19<18.79,c23>-54.56。
45、可选的,所述机器视觉镜头的焦距为f,其中,8mm≤f≤8.6mm。
46、可选的,所述机器视觉镜头的物距范围为100mm至1000mm。
47、可选的,所述机器视觉镜头的像面直径为ic,所述机器视觉镜头的总长为ttl,其中,0.16≤ic/ttl≤0.43。
48、可选的,所述机器视觉镜头还包括光阑;
49、所述光阑位于所述前透镜群和所述后透镜群之间的光路中。
50、可选的,所述机器视觉镜头还包括平板玻璃,所述平板玻璃位于所述第十四透镜的像侧面一侧。
51、本实用新型实施例提供的机器视觉镜头,设置前透镜群和后透镜群包括14枚透镜,且14枚透镜中含有三组胶合透镜组,通过合理分配各透镜及各胶合透镜组的光焦度,实现焦距在8mm左右,可以适配1.1英寸靶面成像传感器(sensor)芯片的短焦大靶面高分辨率机器视觉镜头,并且还提高了边缘视场的分辨率,可以满足较大的识别范围;同时,设置后透镜群沿光轴方向移动设置,即采用后群对焦的方式,实现100mm至1000mm的物距范围,结合各透镜位置及光焦度的合理搭配,在100mm至1000mm的物距范围内可将成像畸变绝对值控制在3%以下,实现了性能稳定的低畸变机器视觉镜头,可满足不同物距范围的被摄物的取像需求。
52、应当理解,本部分所描述的内容并非旨在标识本实用新型的实施例的关键或重要特征,也不用于限制本实用新型的范围。本实用新型的其它特征将通过以下的说明书而变得容易理解。
- 还没有人留言评论。精彩留言会获得点赞!