一种回声消除方法与流程
本发明属于语音信号处理,具体涉及一种回声消除方法。
背景技术:
1、在语音交互系统中,回声消除质量直接影响用户语音识别交互体验,因此回声消除功能起到重要作用,如何有效增强回声抑制能力,是提升语音交互质量的关键性问题。
2、目前常见的回声消除方案是采用基于递推最小二乘法的自适应滤波器来估计回声路径传递函数,从而消除线性回声,并结合深度学习方法实现非线性回声抑制功能。这类方法的回声抑制能力容易受到复杂环境的影响,例如语音和回声的信噪比较低时,这类方法的回声抑制能力下降,语音失真加重。
技术实现思路
1、为克服现有技术存在的缺陷,本发明公开了一种回声消除方法。
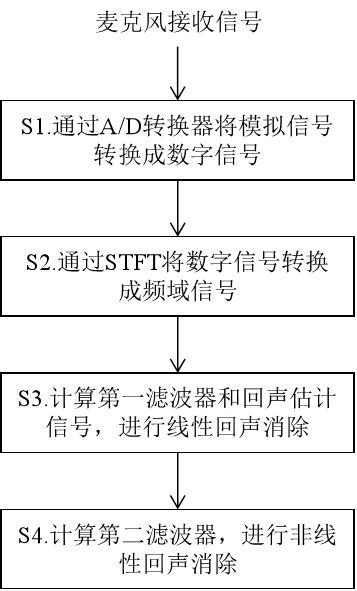
2、本发明所述回声消除方法,包括以下步骤:
3、s1.将模拟参考信号和模拟麦克风信号转换成数字参考信号和数字麦克风信号;
4、s2.通过短时傅里叶变换将数字麦克风信号x(n)和数字参考信号y(n)的时域信号分解成频域麦克风信号x(l,k)和频域参考信号y(l,k);
5、频域麦克风信号x(l,k)表示为
6、;
7、式中 k为频率刻度, l为时域帧索引,d(l,k)为第l帧第k个频点的目标语音信号,为扬声器播放参考信号音频后麦克风拾取到的第l帧第k个频点的线性回声信号,v(l,k)为第l帧第k个频点的周围环境噪声信号;
8、频域线性回声信号
9、;
10、上式中第 l帧第 k个频点的频域参考信号向量
11、 y v( l, k)=[ y( l, k), y( 1-1, k)... y( l-l+1, k)]
12、y(l,k)为当前帧频域参考信号,y(l-1,k)…y(l-l+1,k)分别为当前帧之前的l-1帧,即第l-1,…,l-l+1帧的频域参考信号;
13、 w v( l, k)表示参考信号从扬声器传播到麦克风的理想频域回声路径传递函数,即
14、 w v( l, k)=[ w l( 0, k), w l( 1, k)... w l( l-1, k)],
15、 l为频域参考信号向量和理想频域回声路径传递函数的长度;
16、s3. 将当前帧和过去l-1帧的频域参考信号组成的频域参考信号向量
17、 y v( l, k)=[ y( l, k), y( 1-1, k)... y( l-l+1, k)]
18、存储到缓存器中;
19、s4.对频域参考信号向量进行滤波,输出回声估计信号
20、;
21、式中上标h表示共轭转置,为第l帧第k个频点的回声估计信号,yv(l,k)为第l帧第k个频点的频域参考信号向量,gv(l,k)为第l帧第k个频点的估计回声路径传递函数;
22、对第一帧估计回声路径传递函数,取任意不为零的初值,对后续帧的估计回声路径传递函数gv(l,k),更新公式如下
23、 g v( l, k)= g v( l-1, k)+ k v( l, k) e 1( l, k)
24、式中 k v( l, k)为第 l帧第 k个频点的卡尔曼增益,
25、由所述频域麦克风信号减去回声估计信号得到第一残余信号e1(l,k),
26、;
27、s5.利用第二滤波器对第一残余信号e1(l,k)滤波,输出第二残余信号;
28、首先根据测量噪声协方差矩阵r(l,k)和回声估计信号确定后验信噪比
29、γ(l,k)=r(l,k)/t(l,k)
30、其中t(l,k)为第l帧第k个频点的经过平滑处理后的平滑回声估计能量;r(l,k)为第 l帧第 k个频点的测量噪声协方差矩阵;
31、;
32、为s4步骤中求得的第l帧第k个频点的回声估计信号;
33、 β为第二平滑参数,为第 l帧第 k个频点的原始回声估计能量;e{}表示数学期望 ;
34、接着由以下方程组,根据平滑回声估计能量t(l,k)和后验信噪比γ(l,k),进一步循环计算得到第二残余信号能量re2,e2和先验信噪比;
35、先验信噪比;
36、第二残余信号 e 2( l-1, k)= g( l-1, k) e 1( l, k)
37、第二残余信号能量;
38、第二残余信号平滑后能量;
39、式中max{}表示取最大值,g(l,k)为第二滤波器参数,s(l,k)为第 l帧第 k个频点的经过平滑处理后的第二残余信号平滑后能量,e2(l-1,k)为第 l-1帧第 k个频点的第二残余信号, λ为权重因子, c为经验常数, η为第三平滑参数,
40、初始状态下,l=1,第二滤波器参数和第二残余信号平滑后能量的初始值取设定的初值,计算先验信噪比,然后根据先验信噪比更新第二滤波器参数;
41、;
42、式中g(l,k)为第 l帧第 k个频点的第二滤波器参数,更新后计算第二残余信号能量re2,e2和第二残余信号平滑后能量s(l,k),再重复循环计算;
43、最后输出第二残余信号
44、 e 2( l, k)= g( l, k) e 1( l, k);
45、将第二残余信号转换成时域信号,完成回声消除。
46、优选的,所述s2步骤中,通过短时傅里叶变换将数字麦克风信号x(n)和数字参考信号y(n)的时域信号分解成频域麦克风信号和频域参考信号。
47、优选的,所述s4步骤中,
48、卡尔曼增益的计算方式如下
49、;
50、式中上标t表示转置,p-(l,k)为第 l帧第 k个频点的先验误差协方差矩阵,p(l,k)为第 l帧第 k个频点的后验误差协方差矩阵, f为状态转换矩阵, q为过程噪声协方差矩阵,r(l,k)为第 l帧第 k个频点的测量噪声协方差矩阵, i为单位矩阵。
51、优选的,所述测量噪声协方差矩阵r(l,k)计算方式如下:
52、;
53、式中e{·}表示求数学期望,α为第一平滑参数,re,e(l,k)为第l帧第k个频点的第一残余信号的自相关矩阵。
54、本发明利用优化的回声消除算法,可以有效提高回声抑制能力,提升语音交互质量。
- 还没有人留言评论。精彩留言会获得点赞!