车辆用灯具以及车辆的制作方法
[0001]
本公开涉及车辆用灯具以及车辆。特别是,本公开涉及搭载有毫米波雷达、微波雷达等雷达的车辆用灯具以及车辆。
背景技术:
[0002]
已知有如下技术:将构成为取得表示车辆外部的周边环境的数据的毫米波雷达等雷达搭载于车辆用灯具(例如参照专利文献1)。根据专利文献1,为了从车辆的外部遮蔽配置于车辆用灯具的灯室内的毫米波雷达,将树脂制的导光板配置于毫米波雷达的前方。另外,通过使来自光源的光入射到导光板,能够从外部目视确认导光板的发光。如此,通过导光板的发光,能够从车辆的外部遮蔽毫米波雷达,并且能够通过导光板向车辆的外部出射来自毫米波雷达的电波。
[0003]
现有技术文献
[0004]
专利文献
[0005]
专利文献1:日本特开2008-186741号公报
技术实现要素:
[0006]
发明将要解决的课题
[0007]
然而,在专利文献1所公开的车辆用灯具中,需要另外准备用于遮蔽毫米波雷达的导光板,因此车辆用灯具的部件数量增加,并且车辆用灯具的组装作业的工序数量增加。在这一点,关于具备毫米波雷达等雷达与将该雷达遮蔽的遮蔽部的车辆用灯具,存在改善的余地。
[0008]
本公开的目的在于提供能够相对较容易且可靠地进行雷达相对于车辆的定位、并且从车辆的外部遮蔽雷达的车辆用灯具以及车辆。
[0009]
用于解决课题的手段
[0010]
本公开的一方式的车辆用灯具具备:
[0011]
灯壳体;
[0012]
灯罩,其覆盖所述灯壳体的开口部;
[0013]
照明单元,其配置于利用所述灯壳体与所述灯罩形成的灯室内;
[0014]
雷达,其构成为,通过朝向车辆的外部出射电波,从而取得表示所述车辆的周边环境的雷达数据;
[0015]
遮蔽部,其配置为以从所述车辆的外部遮蔽所述雷达的方式与所述雷达对置,并构成为使从所述雷达出射的电波通过;以及
[0016]
定位部,其抵接于所述雷达,并且构成为决定所述雷达相对于所述遮蔽部的位置,
[0017]
所述遮蔽部与所述灯罩一体地形成,
[0018]
所述定位部与所述遮蔽部一体地形成,并且配置于所述遮蔽部与所述雷达之间。
[0019]
根据上述构成,利用与遮蔽部一体地形成的定位部决定雷达相对于遮蔽部的位
置。另外,遮蔽部与灯罩一体地形成。如此,在车辆用灯具相对于车辆的定位完成的时刻,雷达相对于车辆的定位也同时完成。因而,能够提供可相对较容易且可靠地进行雷达相对于车辆的定位、并且可从车辆的外部遮蔽雷达的车辆用灯具。
[0020]
另外,所述雷达也可以具有前面、位于与所述前面相反的一侧的后面、以及位于所述前面与所述后面之间的侧面。所述定位部也可以具有抵接于所述雷达的前面以及侧面的凹部。
[0021]
根据上述构成,定位部的凹部抵接于雷达的前面与侧面,从而能够决定雷达相对于遮蔽部的位置。
[0022]
另外,所述定位部也可以具有第一定位部和配置为与所述第一定位部对置的第二定位部。所述雷达也可以配置于所述第一定位部与所述第二定位部之间。
[0023]
根据上述构成,能够利用相互对置的第一定位部与第二定位部可靠地进行雷达相对于遮蔽部的定位。
[0024]
本公开的一方式的车辆用灯具具备:
[0025]
灯壳体;
[0026]
灯罩,其覆盖所述灯壳体的开口部;
[0027]
照明单元,其配置于利用所述灯壳体与所述灯罩形成的灯室内;
[0028]
雷达,其构成为,通过朝向车辆的外部出射电波,从而取得表示所述车辆的周边环境的雷达数据;
[0029]
遮蔽部,其配置为以从所述车辆的外部遮蔽所述雷达的方式与所述雷达对置,并构成为使从所述雷达出射的电波通过;
[0030]
支承部件,其构成为对所述雷达进行支承以及固定;以及
[0031]
定位部,其抵接于所述支承部件,并且构成为决定所述支承部件相对于所述遮蔽部的位置,
[0032]
所述遮蔽部与所述灯罩一体地形成,
[0033]
所述定位部与所述遮蔽部一体地形成,并且配置于所述遮蔽部与所述支承部件之间。
[0034]
根据上述构成,利用与遮蔽部一体地形成的定位部决定支承部件相对于遮蔽部的位置。另外,遮蔽部与灯罩一体地形成,并且利用支承部件固定以及支承雷达。如此,在车辆用灯具相对于车辆的定位完成的时刻,雷达相对于车辆的定位也同时完成。因而,能够提供可相对较容易且可靠地进行雷达相对于车辆的定位、并且可从车辆的外部遮蔽雷达的车辆用灯具。
[0035]
另外,所述雷达也可以配置于所述灯室外。
[0036]
根据上述构成,由于雷达配置于灯室外,因此可适当地防止来自配置于灯室内的照明单元的放射热导致雷达的动作性能降低。
[0037]
另外,所述遮蔽部的厚度t也可以由下式规定。
[0038]
t=λ/2ε
r1/2
×
n
[0039]
这里,λ是从所述雷达出射的电波的波长,ε
r
是所述遮蔽部的相对介电常数,n是1以上的整数。
[0040]
根据上述构成,由于遮蔽部的厚度t由t=λ/2ε
r1/2
×
n规定,因此被与雷达对置的
遮蔽部的一个面反射的电波与被遮蔽部的另一个面反射的电波相互减弱。其结果,能够降低遮蔽部对于从雷达出射的电波的反射率。如此,由遮蔽部反射的反射电波的强度变弱,因此能够避免该反射电波入射到雷达而给雷达数据带来负面影响的状况。
[0041]
另外,所述遮蔽部与所述雷达之间的距离也可以是20mm以上100mm以下。
[0042]
根据上述构成,在遮蔽部与雷达之间的距离为20mm以上的情况下,从雷达出射而被遮蔽部反射的反射电波在到达雷达的接收天线之前充分地衰减。因此,能够避免入射到接收天线的该反射电波作为噪声成分给雷达数据带来负面影响的状况。
[0043]
另一方面,在遮蔽部与雷达之间的距离为100mm以下的情况下,能够避免存在于雷达的视野内的电波的一部分不能通过遮蔽部的状况。
[0044]
另外,也可以提供具备上述车辆用灯具的车辆。
[0045]
上述根据,能够提供可相对较容易且可靠地进行雷达相对于车辆的定位、并且可从车辆的外部遮蔽雷达的车辆。
[0046]
发明效果
[0047]
根据本公开,能够提供可相对较容易且可靠地进行雷达相对于车辆的定位、并且可从车辆的外部遮蔽雷达的车辆用灯具以及车辆。
附图说明
[0048]
图1是具备左侧车辆用灯具以及右侧车辆用灯具的车辆的主视图。
[0049]
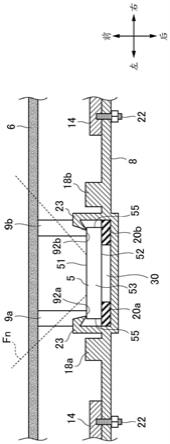
图2是右侧车辆用灯具的垂直方向的剖面图。
[0050]
图3是表示由遮蔽部反射的反射电波的图。
[0051]
图4是表示雷达、支承部件、以及遮蔽部的水平方向的剖面图。
[0052]
图5是表示本实施方式的定位部、雷达、以及遮蔽部的主视图。
[0053]
图6是表示雷达、支承部件、以及遮蔽部的水平方向的剖面图。
[0054]
图7是表示变形例的定位部、雷达、以及遮蔽部的主视图。
[0055]
附图标记说明
[0056]
2:车辆用灯具
[0057]
2l:左侧车辆用灯具
[0058]
2r:右侧车辆用灯具
[0059]
3:近光用照明单元
[0060]
4:远光用照明单元
[0061]
5:雷达
[0062]
6:遮蔽部
[0063]
8:支承部件
[0064]
9a、9b、9c、9d:定位部
[0065]
12:灯罩
[0066]
14:灯壳体
[0067]
18a、18b:肋
[0068]
19a、19b、19c、19d:定位部
[0069]
20a、20b:隔件
[0070]
30:空气层
[0071]
53:天线部
[0072]
54:通信电路部
具体实施方式
[0073]
以下,一边参照附图,一边说明本公开的实施方式(以下,简称作“本实施方式”。)。本附图所示的各部件的尺寸有为了方便说明而与实际的各部件的尺寸不同的情况。
[0074]
在本实施方式的说明中,为了方便说明,有时适当地提及“左右方向”、“上下方向”、“前后方向”。这些方向是关于图1所示的车辆1设定的相对方向。这里,“左右方向”是包含“左方向”以及“右方向”的方向。“上下方向”是包含“上方向”以及“下方向”的方向。“前后方向”是包含“前方向”以及“后方向”的方向。另外,在图1中,未示出“前后方向”,但“前后方向”是与左右方向以及上下方向垂直的方向。
[0075]
另外,在本实施方式中,提及了车辆1的“水平方向”,但“水平方向”是与上下方向(垂直方向)垂直的方向,并且是包含左右方向与前后方向的方向。而且,在本实施方式中,对于右侧车辆用灯具2r以及左侧车辆用灯具2l设定的方向(左右方向、上下方向、前后方向)与设定于车辆1的方向(左右方向、上下方向、前后方向)一致。
[0076]
首先,参照图1,对本实施方式的车辆1进行说明。图1是具备左侧车辆用灯具2l与右侧车辆用灯具2r的车辆1的主视图。如图1所示,在车辆1的左前侧配置有左侧车辆用灯具2l,并且在车辆1的右前侧配置有右侧车辆用灯具2r。左侧车辆用灯具2l以及右侧车辆用灯具2r的各个具备近光用照明单元3、远光用照明单元4、雷达5、以及遮蔽雷达5的遮蔽部6。
[0077]
在本实施方式中,左侧车辆用灯具2l以及右侧车辆用灯具2r设为具备相同的构成。因而,在之后的说明中,参照图2对右侧车辆用灯具2r的具体构成进行说明。另外,为了方便说明,有时将左侧车辆用灯具2l与右侧车辆用灯具2r简单通称为“车辆用灯具2”。
[0078]
近光用照明单元3构成为朝向车辆1的前方出射近光用配光图案。远光用照明单元4构成为朝向车辆1的前方出射远光用配光图案。
[0079]
雷达5构成为,通过朝向车辆1的外部出射电波(例如毫米波、微波),取得表示车辆1的周边环境的雷达数据。雷达5例如是毫米波雷达或者微波雷达。未图示的车辆控制部(车载计算机)构成为,基于从雷达5输出的雷达数据,确定车辆1的周边环境(特别是,与存在于车辆1的外部的对象物相关的信息)。
[0080]
雷达5具备天线部53和通信电路部54(参照图5)。天线部53具备:构成为向空中放射电波(例如波长为1mm至10mm的毫米波)的一个以上的发送天线、以及构成为接收由对象物反射的反射电波的一个以上的接收天线。天线部53也可以构成为贴片天线(形成于基板上的金属图案)。从发送天线放射的放射电波被他车辆等对象物反射之后,来自对象物的反射电波被接收天线接收。
[0081]
通信电路部54具备发送侧rf(无线频率)电路、接收侧rf电路、以及信号处理电路。通信电路部构成为单片微波集成电路(mmic)。发送侧rf电路电连接于发送天线。接收侧rf电路电连接于接收天线。信号处理电路构成为通过处理从接收侧rf电路输出的数字信号而生成雷达数据。
[0082]
天线部53与通信电路部54也可以收容于箱内。另外,天线部53也可以被天线罩覆
盖。
[0083]
遮蔽部6配置为,以从车辆1的外部遮蔽雷达5的方式与雷达5对置。另外,遮蔽部6构成为使从雷达5出射的电波透过。遮蔽部6例如可以由不透明的树脂部件构成。特别是,遮蔽部6也可以由以黑色等规定颜色着色了的树脂部件构成。另外,遮蔽部6也可以由具有多个细微的棱镜的回复反射器构成。在该情况下,来自外部的光被回复反射器的棱镜全反射,因此能够利用回复反射器从外部遮蔽雷达5。如此,能够利用遮蔽部6从车辆1的外部遮蔽雷达5,能够提高右侧车辆用灯具2r的外观的外观设计性。
[0084]
图2是右侧车辆用灯具2r的垂直方向(上下方向)的剖面图。如图2所示,右侧车辆用灯具2r还具备灯壳体14、覆盖灯壳体14的开口部的灯罩12、以及支承部件8。灯壳体14例如也可以由金属部件形成。灯罩12例如也可以由透明的树脂部件形成。近光用照明单元3以及远光用照明单元4配置于由灯壳体14与灯罩12形成的灯室s内。
[0085]
另外,在本实施方式中,也可以取代远光用照明单元4而将出射具有照射区域与非照射区域的adb(adaptive driving beam)用配光图案的adb用照明单元配置于灯室s内。另外,lidar单元、相机也可以配置于灯室s内。
[0086]
支承部件8为金属制的托架,并构成为对雷达5进行支承以及固定。支承部件8经由螺丝22固定于灯壳体14(参照图4)。支承部件8从灯壳体14向下方延伸。另外,雷达5以及支承部件8配置于灯室s外,因此可适当地防止雷达5的动作因从近光用照明单元3、远光用照明单元4产生的热量而受到负面影响。
[0087]
遮蔽部6与灯罩12一体地形成,并且从灯罩12向下方延伸。由于遮蔽部6一体地形成于灯罩12,因此可省略用于将遮蔽部6安装于右侧车辆用灯具2r的作业工序,能够减少右侧车辆用灯具2r的组装作业的工序数。
[0088]
另外,遮蔽部6与灯罩12也可以通过使用了模具的双色成形一体地形成。在遮蔽部6与灯罩12通过双色成形一体地形成的情况下,在遮蔽部6与灯罩12之间的边界部b或者其附近,在遮蔽部6以及灯罩12形成有突出部。因此,在本实施方式中,以使遮蔽部6与灯罩12之间的边界部b配置于雷达5的垂直方向的视野fv外的方式调整了遮蔽部6与雷达5之间的相对的位置关系。
[0089]
如此,由于遮蔽部6与灯罩12的边界部b配置于雷达5的视野fv外,因此存在于雷达5的视野fv内的电波被突出部反射,结果,能够避免该反射电波入射到雷达5的接收天线而给雷达数据带来负面影响的状况。因此,能够确保由搭载于右侧车辆用灯具2r的雷达5取得的雷达数据的可靠性。
[0090]
雷达5的水平方向上的视野fn(参照图4)例如也可以为120
°
至180
°
的范围内。换言之,雷达5的视野fn也可以相对于雷达5的中心轴为
±
60
°
至
±
90
°
的范围内。雷达5的垂直方向的视野fv例如也可以为3
°
至100
°
的范围内。另外,雷达5的视野与雷达5的检测范围同义。
[0091]
也可以与雷达5与遮蔽部6之间的相对的位置关系关联地将前后方向上的遮蔽部6与雷达5之间的距离d设定为20mm以上100mm以下。在遮蔽部6与雷达5之间的距离d为20mm以上的情况下,从雷达5出射而被遮蔽部6反射的反射电波在到达雷达5的接收天线之前充分地衰减。因此,能够避免由雷达5接收到的反射电波作为噪声成分给雷达数据带来负面影响的状况。
[0092]
另一方面,在遮蔽部6与雷达5之间的距离为100mm以下的情况下,能够避免存在于
雷达5的视野内的电波的一部分不能通过遮蔽部6的状况。即,能够避免不能通过遮蔽部6的电波的一部分被遮蔽部6与灯罩12的边界部、其他光学部件反射、结果导致该反射电波作为噪声成分给雷达数据带来负面影响的状况。
[0093]
接下来,以下参照图3对遮蔽部6的前后方向上的厚度t进行说明。图3是表示由遮蔽部6反射的反射电波r1、r2的图。图3所示的遮蔽部6的厚度t由以下式(1)规定。
[0094]
【式1】
[0095][0096]
这里,λ是从雷达5出射的电波的波长。ε
r
是遮蔽部6的相对介电常数,n是1以上的整数。
[0097]
如此,在遮蔽部6的厚度t被设定为上述式(1)所规定的厚度的情况下,被与雷达5对置的遮蔽部6的一个面62反射的反射电波r2和被遮蔽部6的位于与该一个面62相反的一侧的另一个面63反射的反射电波r1相互减弱。具体而言,由于反射电波r2与反射电波r1之间的相位差δθ成为(2m+1)π(m是零以上的整数),因此反射电波r1与反射电波r2相互减弱。其结果,能够降低遮蔽部6对从雷达5出射的电波的反射率。因而,由遮蔽部6反射的反射电波的强度变弱,因此能够避免该反射电波被雷达5接收从而作为噪声成分给雷达数据带来负面影响的状况。例如在设为雷达5的电波的波长λ是3.922mm、遮蔽部6的相对介电常数ε
r
是2、n=1的情况下,遮蔽部6的厚度t成为1.386mm。
[0098]
接下来,通过主要参照图4,具体地说明雷达5、支承部件8、以及遮蔽部6的各构造。图4是表示雷达5、支承部件8、以及遮蔽部6的水平方向的剖面图。如图4所示,支承部件8经由作为固定单元的螺丝22固定于灯壳体14。雷达5被设于支承部件8的矛状物23支承以及固定。雷达5具有前面51、位于与前面51相反的一侧的后面52、以及位于前面51与后面52之间的侧面55。雷达5的前面51、后面52以及侧面55也可以分别相当于雷达5的箱的前面、后面以及侧面。从雷达5的天线部53(发送天线)出射的电波通过前面51从而放射到空中。另外,由存在于车辆1的外部的对象物反射的反射电波通过前面51,从而入射到天线部53(接收天线)。
[0099]
在雷达5的后面52与支承部件8之间设有隔件20a、20b。隔件20a、20b的热传导率也可以比支承部件8的热传导率低。隔件20a抵接于雷达5的后面52,并且沿雷达5的侧面55在上下方向上延伸。同样,隔件20b抵接于雷达5的后面52,并且沿雷达5的侧面55在上下方向上延伸。隔件20a经由空气层30在左右方向上与隔件20b对置。
[0100]
如此,由于相互分离的两个隔件20a、20b设于雷达5与支承部件8之间,因此能够相对较容易地在雷达5的后面52与支承部件8之间设置空气层30(隔热层的一个例子)。
[0101]
根据本实施方式,在支承部件8与雷达5的后面52之间设有作为隔热层发挥功能的空气层30,因此从存在于雷达5的后方的发动机(外部热源)放射的热量难以经由支承部件8传递到雷达5的后面52。因此,可适当地防止来自发动机的放射热导致雷达5(特别是,通信电路部54)的动作性能降低。因而,能够确保雷达5对于来自外部的放射热的可靠性,并且从车辆1的外部遮蔽雷达5。
[0102]
在这一点,在隔件20a、20b未设于雷达5与支承部件8之间的情况下,雷达5的后面52与支承部件8直接接触。因此,来自发动机的放射热容易从热传导率高的支承部件8传递
到雷达5的后面52。因此,存在雷达5的动作性能因来自发动机的放射热而大幅降低的隐患。
[0103]
另外,在隔件20a、20b的热传导率比支承部件8的热传导率低的情况下,来自发动机的放射热更难以经由支承部件8传递到雷达5。因此,隔件20a、20b也可以利用热传导率低于由金属部件构成的支承部件8的部件构成。
[0104]
接下来,以下通过参照图4以及图5,对定位部9a~9d进行说明。图5是表示定位部9a~9d、雷达5、以及遮蔽部6的主视图。如图4以及图5所示,定位部9a~9d的各个构成为,通过抵接于雷达5,决定雷达5相对于遮蔽部6的位置。换言之,雷达5与遮蔽部6之间的相对的位置关系由定位部9a~9d决定。
[0105]
定位部9a~9d的各个具有抵接于雷达5的前面51与侧面55的凹部。在这一点,如图4所示,定位部9a具有抵接于前面51与侧面55的凹部92a。定位部9b具有抵接于前面51与侧面55的凹部92b。各定位部的凹部抵接于雷达5的前面51与侧面55,从而能够可靠地决定雷达5相对于遮蔽部6的位置。
[0106]
特别是,在各定位部9a~9d抵接于雷达5的状态下,经由螺丝22支承雷达5的支承部件8固定于灯壳体14。如此,通过使用定位部9a~9d,能够可靠地决定雷达5相对于遮蔽部6的位置。
[0107]
另外,定位部9a~9d的各个与遮蔽部6一体地形成,在前后方向上配置于遮蔽部6与雷达5之间。定位部9a~9d也可以由与遮蔽部6相同的材料(例如不透明的树脂材料)形成。例如遮蔽部6与定位部9a~9d也可以通过使用了模具的注射成形一体地形成。
[0108]
如图5所示,定位部9a(第一定位部的一个例子)在左右方向上与定位部9b(第二定位部的一个例子)对置。雷达5在左右方向上配置于定位部9a与定位部9b之间。定位部9c在上下方向上与定位部9a对置。定位部9d在上下方向上与定位部9b对置,并且在左右方向上与定位部9c对置。
[0109]
另外,在本实施方式中,利用四个定位部9a~9d决定了雷达5相对于遮蔽部6的位置,但定位部的个数并不限定于四个。例如定位部的个数也可以是两个。在该情况下,优选的是,在左右方向上,两个定位部的一方经由雷达5与另一方的定位部对置。而且,两个定位部也可以沿雷达5的侧面55延伸突出。通过设置两个以上的定位部,能够可靠地决定雷达5相对于遮蔽部6的位置。
[0110]
根据本实施方式,利用与遮蔽部6一体地形成的定位部9a~9d决定了雷达5相对于遮蔽部6的位置,并且遮蔽部6与灯罩12一体地形成。如此,在右侧车辆用灯具2r相对于车辆1的定位完成的时刻,雷达5相对于车辆1的定位也同时完成。因而,能够相对较容易且可靠地进行雷达5相对于车辆1的定位,并且能够从车辆1的外部遮蔽雷达5。
[0111]
(变形例)
[0112]
接下来,以下通过参照图6以及图7,对变形例的定位部19a~19d进行说明。图6是表示雷达5、支承部件8、以及遮蔽部6的水平方向的剖面图。图7是表示变形例的定位部19a~19d、雷达5、以及遮蔽部6的主视图。
[0113]
如图6以及图7所示,定位部19a~19d的各个构成为,通过抵接于将雷达5支承以及固定的支承部件8,从而决定支承部件8相对于遮蔽部6的位置。在本变形例中,由于雷达5利用支承部件8定位,因此伴随着支承部件8与遮蔽部6的相对的位置关系的决定,雷达5与遮蔽部6之间的相对的位置关系得以决定。
[0114]
定位部19a~19d的各个具有抵接于从支承部件8的前面82突出的肋18a、18b的凹部。在这一点,定位部19a具有抵接于肋18a的前面180a以及侧面182a的凹部94a。定位部19b具有抵接于肋18b的前面180b以及侧面182b的凹部94b。各定位部的凹部抵接于形成于支承部件8的肋,从而能够可靠地决定支承部件8相对于遮蔽部6的位置。
[0115]
特别是,在各定位部19a~19d抵接于支承部件8的状态下,支承部件8经由螺丝22固定于灯壳体14。如此,通过使用定位部19a~19d,能够可靠地决定支承部件8相对于遮蔽部6的位置。
[0116]
另外,定位部19a~19d的各个与遮蔽部6一体地形成,在前后方向上配置于遮蔽部6与雷达5之间。定位部19a~19d也可以由与遮蔽部6相同的材料(例如不透明的树脂材料)形成。例如遮蔽部6与定位部19a~19d也可以通过使用了模具的注射成形一体地形成。
[0117]
如图7所示,定位部19a(第一定位部的一个例子)在左右方向上与定位部19b(第二定位部的一个例子)对置。雷达5在左右方向上配置于定位部19a与定位部19b之间。定位部19c在上下方向上与定位部19a对置。定位部19d在上下方向上与定位部19b对置,并且在左右方向上与定位部19c对置。
[0118]
另外,在本变形例中,定位部的个数也同样并不限定于四个。例如定位部的个数也可以是两个。在该情况下,优选的是,在左右方向上,两个定位部的一方经由雷达5与另一方的定位部对置。而且,也可以是,两个定位部的一方沿支承部件8的肋18a的侧面182a延伸突出,另一方面,两个定位部的另一方沿支承部件8的肋18b的侧面182b延伸突出。
[0119]
根据本实施方式,遮蔽部6利用与一体地形成的定位部19a~19d决定支承部件8相对于遮蔽部6的位置。另外,遮蔽部6与灯罩12一体地形成,并且利用支承部件8固定了雷达5。如此,在右侧车辆用灯具2r相对于车辆1的定位完成的时刻,雷达5相对于车辆1的定位也同时完成。因而,能够相对较容易且可靠地进行雷达5相对于车辆1的定位,并且能够从车辆1的外部遮蔽雷达5。
[0120]
以上,说明了本发明的实施方式,但本发明的技术范围当然不应被本实施方式的说明限定性地解释。本实施方式只是一个例子,本领域技术人员可理解为在权利要求书所记载的发明范围内能够进行各种实施方式的变更。本发明的技术范围应基于权利要求书所记载的发明范围及其等效范围而确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1