灯随车动智能调光控制系统的制作方法
1.本发明涉及路灯技术领域,具体为灯随车动智能调光控制系统。
背景技术:
2.路灯作为一种照明工具,除要求节能、环保之外,同时也要考虑照明环境的安全和舒适性,这就要求科学合理的光学设计,使灯具达到既高效,节能,又有良好的照明质量,建立优质、高效、经济、舒适、安全、有益的环境,以期实现真正的“绿色照明”。
3.现有马路路灯,在上半夜由于车辆较多,通常是路灯亮度达到100%的功率进行工作,但是在深夜及下半夜,由于路上行驶车辆较少,路灯在高功率照明会造成很大的浪费,因此部分路灯设计了休眠或者低功率照明的方法,低功率照明其亮度低,使得司机的观察视野小易出现交通事故,而休眠的路灯,通过路灯上雷达传感器进行感应车辆,然后控制路灯照明,但是雷达传感器其感应距离低,车辆行驶过快时,路灯照明不及时,易给驾驶者带来亮度差,使得驾驶者眼部易疲劳,为此,我们提出灯随车动智能调光控制系统。
技术实现要素:
4.本发明的目的在于提供一种够亮加省电的灯随车动智能调光控制系统,以解决上述背景技术中提出的问题。
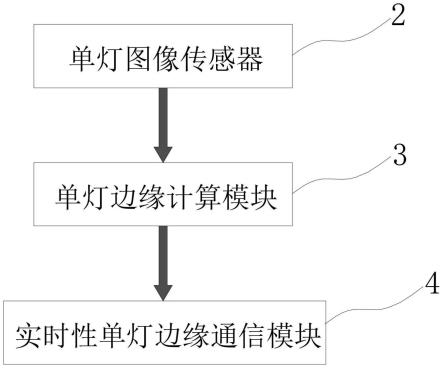
5.为实现上述目的,本发明提供如下技术方案:灯随车动智能调光控制系统,包括灯壳,还包括安装于所述灯壳底部的单灯图像传感器,所述单灯图像传感器用于车辆抓拍;安装于所述灯壳内的单灯边缘计算模块,所述单灯边缘计算模块用于对车速、行驶方向、车道、车流量等道路交通信息的实时抓取和计算;实时性单灯边缘通信模块,所述实时性单灯边缘通信模块包括多个单灯控制器和一个单灯集中控制器,多个单灯控制器和一个单灯集中控制器分别安装于多个所述灯壳外侧,且单灯集中控制器安装于最外端的所述灯壳上;用于单灯控制器和单灯集中控制器外侧清洁的清洁机构,所述清洁机构安装于所述灯壳外侧。
6.优选的,所述清洁机构包括转动安装于所述灯壳顶部的转动台,所述转动台内用于安插单灯控制器和单灯集中控制器,所述转动台外沿处固定有支撑杆,且所述支撑杆外侧固定有用于控制器外壁清洁的毛刷板,所述转动台位于所述灯壳内的一端外侧固定有齿环,且所述灯壳内固定有驱动电机,所述驱动电机输出端固定有与所述齿环相啮合的驱动齿轮,通过设计的清洁机构实现对控制器外壁灰尘的清洁。
7.优选的,所述灯壳外侧对应所述转动台位置处固定有弧形台,所述弧形台两端均固定有安装块,且两个所述安装块之间固定有弧形杆,所述弧形杆外侧滑动套有移动座,且所述移动座外侧滑动插接有棱形杆,所述棱形杆顶端固定有l型架,且所述l型架内侧固定有多个清洁片,所述弧形杆外侧套有用于所述移动座复位的复位弹簧,所述棱形杆和支撑杆外侧安装有对接件,且所述棱形杆底部安装有抖动件,通过设计的l型架和清洁片,能够对毛刷板上残留灰尘的去除,提高清洁效率。
转轴;28-带动齿轮;29-缠绕管;30-负压风扇;31-挤压弹簧;32-稳定柱。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
28.实施例1
29.请参阅图1和图2,图示中的灯随车动智能调光控制系统,包括灯壳1,还包括安装于灯壳1底部的单灯图像传感器2,单灯图像传感器2用于车辆抓拍;安装于灯壳1内的单灯边缘计算模块3,单灯边缘计算模块3用于对车速、行驶方向、车道、车流量等道路交通信息的实时抓取和计算;实时性单灯边缘通信模块4,实时性单灯边缘通信模块4包括多个单灯控制器和一个单灯集中控制器,多个单灯控制器和一个单灯集中控制器分别安装于多个灯壳1外侧,且单灯集中控制器安装于最外端的灯壳1上;用于单灯控制器和单灯集中控制器外侧清洁的清洁机构5,清洁机构5安装于灯壳1外侧。
30.需要说明的是:本方案中,单灯图像传感器2、单灯边缘计算模块3和实时性单灯边缘通信模块4均安装在灯壳1上,其中单灯图像传感器2位于灯壳1下方用于车辆的拍摄,实时性单灯边缘通信模块4中的单灯控制器和一个单灯集中控制器均安装于灯壳1顶部,安装简单便捷,成本较低。
31.实现够亮加省电的原理;首先,人员对一排路灯进行安装单灯图像传感器2和单灯边缘计算模块3,并在进入道的第一个路灯上安装单灯集中控制器,其他路灯安装单灯控制器,在深夜时,一排路灯均为待机不亮的状态,在一辆车通过时,通过第一个路灯上的单灯图像传感器2检测到车辆的到来,然后控制第一个路灯亮起,并根据车辆的车速,依次对后续路灯进行点亮,从而能够极大的实现省电,同时路灯处于百分之百功率的点亮,实现够亮,使得人员观察更加方便。
32.实施例2
33.请参阅图3-图5,本实施方式对于实施例1进一步说明,图示中的清洁机构5包括转动安装于灯壳1顶部的转动台6,转动台6内用于安插单灯控制器和单灯集中控制器,转动台6外沿处固定有支撑杆7,且支撑杆7外侧固定有用于控制器外壁清洁的毛刷板8,转动台6位于灯壳1内的一端外侧固定有齿环9,且灯壳1内固定有驱动电机10,驱动电机10输出端固定有与齿环9相啮合的驱动齿轮11。
34.值得注意的是:通过驱动电机10的转动,从而带动驱动齿轮11和齿环9的转动,实现对转动台6进行转动,实现对控制器外壁进行擦拭,避免灰尘的附着。
35.另外,请参阅图6和图7,图示中的灯壳1外侧对应转动台6位置处固定有弧形台12,弧形台12两端均固定有安装块13,且两个安装块13之间固定有弧形杆14,弧形杆14外侧滑动套有移动座15,且移动座15外侧滑动插接有棱形杆16,棱形杆16顶端固定有l型架17,且l型架17内侧固定有多个清洁片18,弧形杆14外侧套有用于移动座15复位的复位弹簧19,棱形杆16和支撑杆7外侧安装有对接件20,且棱形杆16底部安装有抖动件21;
36.需要说明的是:通过设计的l型架17和清洁片18的相互配合,从而能够实现对毛刷
板8上灰尘的抖动去除,使得清洁更加方便。
37.请参阅图6-图8,图示中的抖动件21包括固定在棱形杆16底部的连接球22,弧形台12外侧等角度固定有多个球形凸起23,且弧形台12端头处开有下落口24;
38.其中,为了使棱形杆16上下伸缩更加稳定,在棱形杆16外侧固定有用于球形凸起23向下移动的挤压弹簧31;
39.需要说明的是:通过设计的连接球22依次与多个球形凸起23相接触,从而能够实现对棱形杆16的上下调节,实现对清洁片18的抖动,从而实现对毛刷板8的清洁。
40.值得注意的是:为了使棱形杆16的上下移动更加顺畅,在移动座15和棱形杆16插接端固定有稳定柱32,其稳定柱32与棱形杆16滑动插接。
41.同时,请参阅图6、图7和图10,图示中的对接件20包括固定在棱形杆16外侧的对接块25,支撑杆7外侧固定有与对接块25相抵的抵板26,对接块25截面形状为l型结构,且对接块25的水平面端开有倒角;
42.其中,为了避免雨水的侵入,在缠绕管29位于灯壳1外侧的一端上转动盖有防水盖,防水盖为常见的翻盖结构,在负压排气时,气压过大,会吹开防水盖,从而排气,在不排气时,防水盖处于密闭状态。
43.需要说明的是:对接块25为l型结构,在抵板26与其接触时,会与对接块25侧面接触,在棱形杆16移动到下落口24时,对接块25跟随下移,从而使得抵板26与对接块25的上方不接触,在复位弹簧19的作用下,从而推动移动座15复位。
44.对控制器外壁进行清洁的原理:首先通过驱动电机10转动,带动驱动齿轮11和齿环9转动,从而控制毛刷板8沿着控制器外壁进行清洁,在移动到l型架17和清洁片18位置时,会对毛刷板8上灰尘进行排除,同时通过抵板26带动棱形杆16跟随移动,棱形杆16上下移动,从而带动清洁片18对毛刷板8上下抖动,实现对灰尘的去除,最后通过复位弹簧19的作用下,推动移动座15复位。
45.实施例3
46.请参阅图8和图9,本实施方式对于其它实施例进一步说明,图示中的灯壳1内壁转动安装有转轴27,且转轴27外侧固定有与齿环9相啮合的带动齿轮28,灯壳1内设有绕在单灯边缘计算模块3和驱动电机10外侧的缠绕管29,且缠绕管29内侧开有散热孔,缠绕管29顶端固定贯穿灯壳1,且转轴27底端转动插接与缠绕管29内,转轴27位于缠绕管29内的一端外侧固定有负压风扇30。
47.需要说明的是:在通过齿环9使得带动齿轮28转动,从而能够控制负压风扇30的转动,使得缠绕管29外侧散热孔对单灯边缘计算模块3和驱动电机10外侧热气吸附,并排除灯壳1外,起到降温散热作用,避免路灯长时工作,产生高温对单灯边缘计算模块3造成影响。
48.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
49.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以
理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1