一种可远程控制的智能矿用照明灯具的制作方法
1.本实用新型涉及矿用照明技术领域,具体为一种可远程控制的智能矿用照明灯具。
背景技术:
2.矿灯适用于煤矿井下有瓦斯(甲烷族)煤尘爆炸危险的场所,井底采区巷道,亦可在有淋水较大的基建矿井巷道及硐室中使用。主要用途:用于矿山、石油、化工、铁路、运输、仓储等存在易燃易爆可燃气体的环境中安全照明、抢险救灾照明。
3.矿井内开采矿物不可避免的会出现大量的粉尘,粉尘的危害性极大,它不仅污染作业环境,影响作业人员的身体健康,呼吸性粉尘可能导致矿工患尘肺病;而且有爆炸性的粉尘在条件具备时可能发生爆炸,造成重大安全事故,不但影响生产,而且还会造成大量人员伤亡和严重的经济损失,粉尘吸附在矿用巷道灯的灯罩表面还会影响灯光照明,现有的装置并不能很好的解决矿用巷道灯在粉尘吸附在灯罩上,从而影响灯光照明的问题。
技术实现要素:
4.本实用新型提供了一种可远程控制的智能矿用照明灯具,具备能快速清除吸附在灯罩上的粉尘的优点。
5.为实现能快速清除吸附在灯罩上的粉尘优点的目的,本实用新型提供如下技术方案:一种可远程控制的智能矿用照明灯具,包括照明灯具壳体和安装在照明灯具壳体外侧表面的灯罩,所述照明灯具壳体内部安装有若干个照明灯,所述照明灯具壳体的外侧表面安装有集尘机构,用于吸取吸附在灯罩上的粉尘,所述照明灯具壳体的外侧表面安装有清洁机构,用于清理集尘机构上的粉尘,所述照明灯具壳体的顶端表面安装有驱动机构,用于驱动清洁机构所述照明灯具壳体内部安装有无线通讯模块,所述无线通讯模块连接至照明灯和驱动机构。
6.作为本实用新型的一种优选技术方案,所述驱动机构包括正反电机和齿轮转动组织,所述正反电机的底端表面安装在照明灯具壳体的顶端表面,所述正反电机的外侧表面安装有防爆玻璃罩,所述照明灯具壳体内部开设有第一空腔,所述齿轮转动组织活动安装在第一空腔内。
7.作为本实用新型的一种优选技术方案,所述齿轮转动组织包括第一直齿轮和第二直齿轮,所述第一直齿轮的一侧表面安装在正反电机输出端的外侧表面,所述第一空腔的内壁两端活动安装有连接杆,所述连接杆的外侧表面套装有第二直齿轮,所述第一直齿轮与第二直齿轮相互啮合,所述连接杆的一端套装有第一斜齿轮。
8.作为本实用新型的一种优选技术方案,所述清洁机构包括静电除尘棒和除尘组织,所述第一空腔外壁两端均开设有两个第二空腔,两个所述除尘组织分别活动安装在两个第二空腔内,所述静电除尘棒的一侧表面安装有固定杆,所述固定杆的末端表面安装在照明灯具壳体的外侧表面,两个所述静电除尘棒分别位于照明灯具壳体的两侧,所述除尘
组织的顶端表面安装有第二斜齿轮。
9.作为本实用新型的一种优选技术方案,所述除尘组织包括滚珠丝杆和螺母,所述滚珠丝杆的一端表面活动安装在第二空腔内,所述滚珠丝杆的另一端表面安装在第二斜齿轮的底表面,所述第二斜齿轮与第一斜齿轮相互啮合,所述螺母活动安装在滚珠丝杆的外侧表面,所述螺母的外侧表面安装有活动杆,所述照明灯具壳体的外侧表面安装有两片橡胶片,两片所述橡胶片之间紧密并活动接触,所述活动杆安装在两片橡胶片之间,所述活动杆的末端安装有刮环,所述刮环的内壁处与静电除尘棒的外壁活动连接。
10.作为本实用新型的一种优选技术方案,所述集尘机构包括集尘漏斗和集尘箱,所述集尘箱安装在照明灯具壳体的底端表面,所述集尘箱的顶端表面安装有集尘管,所述集尘漏斗的底端表面安装在集尘管的顶端表面,所述集尘漏斗顶端表面与刮环活动接触,所述集尘漏斗安装在静电除尘棒的正下方。
11.与现有技术相比,本实用新型提供了一种可远程控制的智能矿用照明灯具,具备以下有益效果:
12.1、该可远程控制的智能矿用照明灯具,在需要使用灯光时,通过无线通讯模块连接远程控制系统,通过远程控制系统控制照明灯接入电路,通过照明灯提供照明调节,在粉尘较多的矿井内,通过远程控制系统将驱动机构接入电路,驱动机构带动清洁机构,集尘机构在吸取吸附在灯罩上的粉尘,清洁机构刮去吸附在灯罩上的粉尘,使粉尘掉入集尘机构中,能清除矿用巷道灯在粉尘吸附在灯罩时,影响灯光照明的问题。
13.2、该可远程控制的智能矿用照明灯具,当矿井内的粉尘很多,为了防止粉尘吸附到灯罩影响照明,通过远程控制系统将正反电机接入电路,正反电机启动时带动第一直齿轮转动,进而带动第二直齿轮转动,第二直齿轮转动带动连接杆转动,连接杆带动第一斜齿轮转动,进而带动第二斜齿轮转动,从而带动滚珠丝杆转动,使活动安装在滚珠丝杆外侧表面的螺母向上下移动,从而达到刮环在静电除尘棒的外侧表面刮去粉尘,防止粉尘聚集过多而影响静电除尘棒的作用。
14.3、该可远程控制的智能矿用照明灯具,当粉尘刮去后,掉落至集尘漏斗中,经过集尘管进入集尘箱,集尘箱体内有水,使粉尘固定在集尘箱体内,防止粉尘再次飘逸。
附图说明
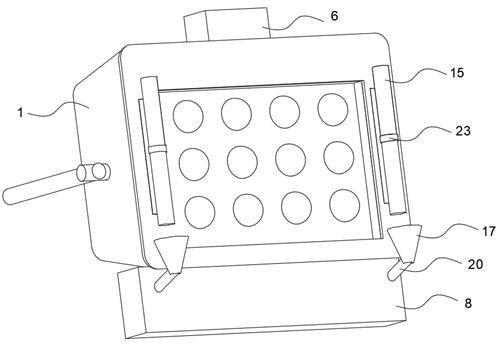
15.图1为本实用新型外部结构示意图;
16.图2为本实用新型内部结构示意图;
17.图3为本实用新型图2中a部分结构放大示意图;
18.图4为本实用新型除尘组织结构示意图;
19.图5为本实用新型另一角度内部结构示意图。
20.图中:1、照明灯具壳体;2、灯罩;3、照明灯;4、无线通讯模块;5、正反电机;6、防爆玻璃罩;7、第一空腔;8、集尘箱;9、连接杆;10、第二空腔;11、第一直齿轮;12、第二直齿轮;13、第一斜齿轮;14、第二斜齿轮;15、静电除尘棒;16、固定杆;17、集尘漏斗;18、滚珠丝杆;19、螺母;20、集尘管;21、活动杆;22、橡胶片;23、刮环。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.请参阅图1-图5,本实用新型公开了一种可远程控制的智能矿用照明灯具,包括照明灯具壳体1和安装在照明灯具壳体1外侧表面的灯罩2,照明灯具壳体1内部安装有若干个照明灯3,照明灯具壳体1的外侧表面安装有集尘机构,用于吸取吸附在灯罩2上的粉尘,照明灯具壳体1的外侧表面安装有清洁机构,用于清理集尘机构上的粉尘,照明灯具壳体1的顶端表面安装有驱动机构,用于驱动清洁机构,照明灯具壳体1内部安装有无线通讯模块4,无线通讯模块4连接至照明灯3和驱动机构。
23.具体的,驱动机构包括正反电机5和齿轮转动组织,正反电机5的底端表面安装在照明灯具壳体1的顶端表面,正反电机5的外侧表面安装有防爆玻璃罩6,照明灯具壳体1内部开设有第一空腔7,齿轮转动组织活动安装在第一空腔7内,齿轮转动组织包括第一直齿轮11和第二直齿轮12,第一直齿轮11的一侧表面安装在正反电机5输出端的外侧表面,第一空腔7的内壁两端活动安装有连接杆9,连接杆9与第一空腔7通过万能球头连接,连接杆9的外侧表面套装有第二直齿轮12,第一直齿轮11与第二直齿轮12相互啮合,连接杆9的一端套装有第一斜齿轮13,当正反电机5被远程控制系统接入电路后,正反电机5开始带动第一直齿轮11旋转,第一直齿轮11带动第二直齿轮12旋转,从而带动清洁机构开始运转,实现远程操控刮去静电除尘棒15上面吸附的粉尘。
24.具体的,清洁机构包括静电除尘棒15和除尘组织,第一空腔7外壁两端均开设有两个第二空腔10,两个除尘组织分别活动安装在两个第二空腔10内,静电除尘棒15的一侧表面安装有固定杆16,固定杆16的末端表面安装在照明灯具壳体1的外侧表面,两个静电除尘棒15分别位于照明灯具壳体1的两侧,除尘组织的顶端表面安装有第二斜齿轮14,除尘组织包括滚珠丝杆18和螺母19,滚珠丝杆18的一端表面活动安装在第二空腔10内,滚珠丝杆18的另一端表面安装在第二斜齿轮14的底表面,第二斜齿轮14与第一斜齿轮13相互啮合,螺母19活动安装在滚珠丝杆18的外侧表面,螺母19的外侧表面安装有活动杆21,照明灯具壳体1的外侧表面安装有两片橡胶片22,两片橡胶片22之间紧密并活动接触,活动杆21安装在两片橡胶片22之间,活动杆21的末端安装有刮环23,刮环23的内壁处与静电除尘棒15的外壁活动连接,通过两个橡胶片22的活动接触保证了照明灯具壳体1内部的密封性,防止灰尘进入,静电除尘棒15接入电路后会吸引吸附在灯罩2表面的粉尘,此时静电除尘棒15受到第二斜齿轮14的转动而转动,螺母19在静电除尘棒15表面直线运动,带动刮环23刮动吸附再静电除尘棒15上面的粉尘,防止了因为粉尘过多而影响静电除尘棒15的吸附作用。
25.具体的,集尘机构包括集尘漏斗17和集尘箱8,集尘箱8内部有水,集尘箱8粘连在照明灯具壳体1的底端表面,集尘箱8的顶端表面安装有集尘管20,集尘漏斗17的底端表面安装在集尘管20的顶端表面,集尘漏斗17顶端表面与刮环23活动接触,集尘漏斗17安装在静电除尘棒15的正下方,当粉尘被刮去后,落入安装在其正下方的集尘漏斗17中,经过集尘管20进入集尘箱8内,集尘箱8内有水,防止了粉尘再次四处飘逸,影响矿井内的环境。
26.本实用新型的工作原理及使用流程:在需要使用灯光时,通过无线通讯模块4连接
远程控制系统,通过远程控制系统控制照明灯3接入电路,通过照明灯3提供照明调节,同时将静电除尘棒15接入电路,通过静电除尘棒15进行除尘,然后将正反电机5接入电路,通过装在防爆玻璃罩6内的正反电机5输出端带动第一直齿轮11转动,第一直齿轮11带动第二直齿轮12转动,从而带动连接杆9转动,进而带动第一斜齿轮13和第二斜齿轮14转动,从而使滚珠丝杆18在第二空腔10内转动,进而使得滚珠丝杆18表面的螺母19沿着滚珠丝杆18直线移动,安装在滚珠丝杆18表面的活动杆21以及刮环23也一并移动,活动杆21在两片橡胶片22之间缝隙上下移动,刮环23刮去了吸附通过固定杆16安装在照明灯具壳体1的静电除尘棒15上的粉尘,落入安装在其正下方的集尘漏斗17中,进过集尘管20进入集尘箱8体内,从而达到可以远程控制,并能快速清除吸附在灯罩2表面的粉尘,达到不影响照明的效果;
27.通过计算机网络、接入internet、异地拨号等不同手段对处于不同网络范围内的两台或多台计算机进行互连的方式称之为远程控制,本实用新型可通过电脑pc端作为远程控制系统与无线通讯模块4连接;
28.静电除尘是气体除尘方法的一种,含尘气体经过高压静电场时被电分离,尘粒与负离子结合带上负电后,趋向阳极表面放电而沉积,在强电场中空气分子被电离为正离子和电子,电子奔向正极过程中遇到尘粒,使尘粒带负电吸附到正极被收集,本实用新型静电除尘棒15是为一种可以使用高压清洁除尘的静电除尘棒15,最多能吸取60cm内的粉尘。
29.需要说明的是,在本文中,诸如术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括要素的过程、方法、物品或者设备中还存在另外的相同要素。
30.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1