一种基于自适应比例同步的电动四轮驱动小车控制方法
1.本发明属于电动四轮驱动小车控制领域,具体涉及一种基于自适应比例同步的电动四轮驱动小车控制方法。
背景技术:
2.电动驱动四轮小车在物流、消防、巡检等领域具有广阔的应用前景。受电池容量以及机身总负载约束,一般电动小车结构尽可能简单,降低电机质量。而质量较轻的电机通常输出力矩不大。因此,电动驱动四轮小车领域常常采用无差速机构的四电机驱动的控制方法。该方法不需要复杂的差速机构,降低成本,减少小车负荷;四轮驱动,驱动力由四个车轮提供,降低了对电机驱动力矩要求,降低电机成本,降低电机重量。因此,无差速机构的电动四轮驱动方式在四轮小车控制领域被大量采用。
3.四轮驱动小车行驶路面可能遇到各种情况,比如路面不平、倾斜、转弯等,这就要求小车的四个轮子转动能满足路面要求。也就是要求小车能够根据路面情况自动调整四个驱动轮的转速比。如果四个驱动轮有一个或者多个驱动轮不能满足转速比要求,那么就可能由驱动轮变为被动轮,出现车轮打滑、空转等现象。驱动轮的减少势必增加其他驱动轮的负载,使其他驱动轮负载急剧上升,甚至可能导致电机烧毁等现象。另外驱动轮减少,也会破坏小车的运动平衡,很容易导致小车侧翻等现象。因此如何确保在任意路面小车四个驱动轮都能满足路面对转速比的要求,是四轮驱动小车的基本要求。然而,四轮驱动小车有四个驱动电机且无差速机构,如何根据小车运动轨迹控制四个驱动电机协调转动是电动四轮驱动小车控制关键问题之一。
技术实现要素:
4.发明目的:针对以上问题,本发明提出一种基于自适应比例同步的电动四轮驱动小车控制方法。建立车身坐标系与世界坐标系关系,利用这一关系研究不同路况小车质心运动与每一个驱动轮转速关系,根据驱动轮与质心转速关系,设计控制器使每一个驱动轮与质心的速率关系始终满足路况要求,从而使每一个驱动轮始终能处于驱动而不是被动状态,驱动轮载荷更均衡,小车运动更平稳。
5.技术方案:为实现本发明的目的,本发明所采用的技术方案是:一种基于自适应比例同步的电动四轮驱动小车控制方法,包括如下步骤:
6.步骤1:根据小车结构建立机身坐标系,坐标原点设在机身质心,x方向为小车前进方向,z方向为小车竖直线上,根据右手法则确定y方向;在机身坐标系下,根据机械结构尺寸确定四个驱动轮轴心在机身坐标系下位置矢量;
7.步骤2:实时读取机身位置姿态传感器信息,获取当前时刻t世界坐标系下当前机身位置、世界坐标系绕x,y,z轴旋转的姿态角度以及相应的速度和角速度;
8.步骤3:根据世界坐标系下机身位置和姿态信息,利用坐标变换关系式计算小车四个驱动轮世界坐标系下位置信息;建立当前时刻t驱动轮轴心l与机身速度、角速度变化关
系式;
9.步骤4:根据变化关系式计算轴心速度矢量的模v
l
(t);设车轮输出控制间隔时间为dt,结合当前时刻t的机身位置、姿态计算t+dt时刻机身位置、姿态;
10.步骤5:计算小车车轮轴心在t+dt时刻的速度和驱动轮速度增量δv
l
(t+dt);根据驱动轮速度增量实时更新四个驱动轮转速;
11.步骤6:根据得到的转速进行控制,各驱动轮驱动力矩均衡;读取各驱动轮力矩传感器参数t
l
(t),求力矩均值t(t),并计算各驱动轮力矩波动系数η
l
(t),如果η
l
(t)都在波动允许范围内,则跳转到步骤1,否则跳转到步骤7;
12.步骤7:根据波动系数η
l
(t)建立模糊隶属度函数ζ
l
(t);修正驱动轮转速v
l
(t+dt)=v
l
(t)+δv
l
(t+dt)-ζ
l
(t)δv
l
(t+dt);转向步骤1,重复运行,直到小车停止运动。
13.进一步的,坐标变换关系式表示如下:
[0014][0015]
其中l=1,2,3,4分别对应前左轮fl,前右轮fr,后左轮bl,后右轮br四个驱动轮,(x
l,
,y
l
,z
l
)表示四个驱动轮世界坐标系下的坐标;(x0(t),y0(t),z0(t))表示世界坐标系下当前机身位置;α(t),β(t),γ(t)表示世界坐标系绕x,y,z轴旋转的姿态角度;
[0016]
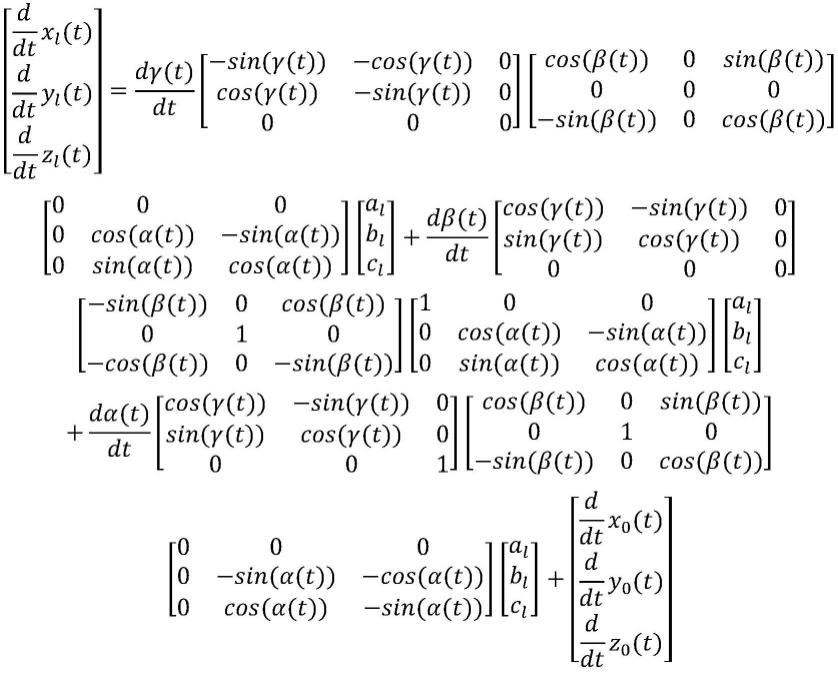
当前时刻t驱动轮轴心l与机身速度、角速度变化关系表示如下:
[0017][0018]
[0019]
式中和分别为世界坐标系绕x,y,z轴旋转的速度和角速度。
[0020]
进一步的,轴心速度矢量的模v
l
(t)计算公式如下:
[0021][0022]
小车车轮轴心在t+dt时刻的速度计算公式如下:
[0023][0024]
驱动轮速度增量计算公式如下:
[0025][0026]
式中(x
l
(t),y
l
(t),z
l
(t))和(x
l
(t+dt),y
l
(t+dt),z
l
(t+dt))分别表示当前t时刻和t+dt时刻世界坐标系下驱动轮轴心l坐标。
[0027]
进一步的,根据得到的转速进行控制,读取各驱动轮力矩传感器参数t
l
(t),l=1,2,3,4,求力矩均值t(t),并计算各驱动轮力矩波动系数η
l
(t),公式如下:
[0028][0029]
根据波动系数η
l
(t)建立模糊隶属度函数ζ
l
(t):
[0030][0031]
其中lim
η
》0为允许波动系数临界值,m为可调的正常数。
[0032]
有益效果:与现有技术相比,本发明的技术方案具有以下有益的技术效果:
[0033]
本发明引入了四轮小车自适应比例控制方法,在无差速机构下,小车四个驱动轮能始终处于驱动状态,小车运动更平稳,行驶更安全。本发明的核心在于使用四轮小车自适应比例控制方法,驱动轮转速能够自动调整,自适应适应路面及转弯情况。本发明使小车驱动轮始终处于驱动状态,驱动轮载荷更均衡,每一个驱动轮载荷最优,有助于降低小车对驱动轮力矩要求,降低驱动电机质量,降低小车成本。
附图说明
[0034]
图1是自适应比例同步的电动四轮驱动小车控制流程图;
[0035]
图2是机身坐标系示意图。
具体实施方式
[0036]
下面结合附图和实施例对本发明的技术方案作进一步的说明。
[0037]
本发明所述的基于自适应比例同步的电动四轮驱动小车控制方法,流程如图1所示,具体步骤如下:
[0038]
步骤1:根据小车结构建立机身坐标系,坐标原点设在机身质心,x方向为小车前进方向,z方向为小车竖直线上,根据右手法则确定y方向。
[0039]
在机身坐标系下,根据机械结构尺寸确定四个驱动轮轴心在机身坐标系下位置矢量:前左轮fl(aai+baj+cak),前右轮fr(a2i+b2j+c2k),后左轮bl(a3i+b3j+c3k),后右轮br(a4i+b4j+c4k),(i,j,k分别对应x,y,z方向单位向量)如图2所示。
[0040]
步骤2:实时读取机身位置姿态传感器信息,获取世界坐标系下当前机身位置(x0(t),y0(t),z0(t))、世界坐标系绕x,y,z轴旋转的姿态角度α(t),β(t),γ(t)以及相应的速度和角速度
[0041]
步骤3:根据世界坐标系下机身位置、姿态信息,利用坐标系变换关系计算小车四个驱动轮世界坐标系下位置信息。四个驱动轮世界坐标系下的坐标表示为(x
l,
,y
l
,z
l
),坐标旋转平移变换关系如下:
[0042][0043]
其中l=1,2,3,4分别对应fl,fr,bl,br驱动轮。
[0044]
步骤4:对方程(1)进行微分,建立当前时刻驱动轮轴心l与机身速度、角速度变化关系:
[0045][0046]
步骤5:由于驱动轮的线速度的模等于轴心速度矢量的模,故根据公式(2)计算轴心速度矢量的模v
l
(t):
[0047][0048]
步骤6:设车轮输出控制间隔时间为dt,根据路况结合当前时刻t的机身位置(x0(t),y0(t),z0(t))、姿态(α(t),β(t),γ(t))计算t+dt时刻机身位置(x0(t+dt),y0(t+dt),z0(t+dt))、姿态(α(t+dt),β(t+dt),γ(t+dt))。
[0049]
步骤7:根据公式(2)和公式(3)计算小车车轮轴心在t+dt时刻的速度
[0050][0051]
步骤8:由于dt一般非常小,利用如下快速公式实现公式(4)
[0052][0053]
步骤9:得到驱动轮速度增量δvi(t+dt)=vi(t+dt)-vi(t),
[0054][0055][0056]
步骤10:根据公式(6),实时更新四个驱动轮转速,各驱动轮转速都能满足路况及机身转向要求,从而各驱动轮都能处于驱动状态,而没有车轮处于被动状态。
[0057]
步骤11:根据得到的转速进行控制,理想情况下各驱动轮驱动力矩均衡。由于受客
观因素制约(如测量误差、随机路况等因素影响),驱动轮力矩在一定范围内波动。
[0058]
读取各驱动轮力矩传感器参数t
l
(t),l=1,2,3,4,求力矩均值t(t),并计算各驱动轮力矩波动系数η
l
(t),如果η
l
(t)都在波动允许范围内,则跳转到步骤1,否则跳转到步骤12。力矩均值t(t)和驱动轮力矩波动系数η
l
(t)计算公式如下:
[0059][0060]
步骤12:根据波动系数η
l
(t)建立模糊隶属度函数ζ
l
(t):
[0061][0062]
其中lim
η
》0为允许波动系数临界值,m为可调的正常数,可调整模糊隶属度函数。
[0063]
步骤13:修正驱动轮转速vi(t+dt)=vi(t)+δvi(t+dt)-ζk(t)δvi(t+dt)。转向步骤1,重复运行,直到小车停止运动。通过设计电动四驱动轮小车自适应控制方法,实现电动小车运动平衡控制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1