一种螺母松紧装置的制作方法
[0001]
本申请涉及螺母加工设备领域,特别涉及到一种螺母松紧装置。
背景技术:
[0002]
螺母松紧手工的螺母松紧包括纯手工松紧和电动螺母刀或者气动螺母刀松紧两种,后者通过电动或者气动的方式产生旋转动力,以代替频繁手工的松紧动作,在某种程度上减轻了锁螺母的工作强度,但由于手工放置螺母和对准螺母头部仍需要占用大量的工作时间和精力,对螺母施加的松紧扭矩不能很精确的控制。
技术实现要素:
[0003]
本申请目的之一为解决现有技术中的设备存在对螺母松紧的松紧技术中扭矩不能精确控制的问题;
[0004]
为到达上述目的,本申请采用以下技术方案:一种螺母松紧装置,包括:工件定位装置,所述工件定位装置适用于定位工件;松紧装置一,所述松紧装置一设置在所述工件定位装置的一侧,所述松紧装置一适用于松紧螺母,所述松紧装置一设置在所述工件定位装置的一侧;所述松紧装置一包括移动机械手一,所述移动机械手一的一端连接套筒头一,另一端活动连接伺服电机一,所述移动机械手一上还活动连接臂力杆一,所述臂力杆一活动连接液压缸一,通过伺服电机一带动移动机械手一转动套筒头一,给予套筒头一初始的扭矩,通过移动机械手一连接套筒头一,控制套筒头一所需的扭矩大小,松紧螺母,解决了现有技术中对螺母松紧的松紧技术中扭矩不能精确控制的问题。
[0005]
进一步的,根据本申请的一个实施例,其中,所述工件定位装置包括x手摇手柄,所述x手摇手柄活动连接有x滚珠丝杆,所述x手摇手柄与所述x滚珠丝杆之间设置有轴承,所述x滚珠丝杆活动连接调整板,所述调整板上活动连接有调整滑块、调整螺母,所述调整螺母用于调整调整板的位置,所述调整板还活动连接在y滚珠丝杆上,所述y滚珠丝杆活动连接有y手摇手柄,所述y滚珠丝杆连接在y固定台上,所述x滚珠丝杆连接在x固定台上。
[0006]
进一步的,根据本申请的一个实施例,其中,所述松紧装置一还包括:滑块一,所述滑块一上设置有固定座一,所述固定座一上安装所述液压缸一。
[0007]
进一步的,根据本申请的一个实施例,其中,所述松紧装置一活动连接有位移装置一,所述位移装置一包括该框架一、移动框架一、滑块二、导轨二、轴承座一、滚珠丝杆一、导轨三、联轴器一、伺服电机二,所述伺服电机二通过联轴器一与滚珠丝杆一连接,所述滚珠丝杆一通过轴承座一与框架一固定,所述移动框架一与所述滑块二连接,所述滑块二活动连接导轨二、导轨三。
[0008]
进一步的,根据本申请的一个实施例,其中,所述松紧装置一活动连接有调整装置一,所述调整装置一包括:齿条一、齿轮一、伺服电机三、导轨四、导轨五、齿条二、齿轮二、伺服电机四、滑块三、滑块四、移动板一、移动板二,所述移动板一固定在所述滑块三上,所述滑块三连接所述齿条一,所述齿条一啮合连接所述齿轮一,所述齿轮一连接所述伺服电机
三,所述伺服电机三固定在移动板一上,所述移动板一通过螺母与滑块三固定,所述滑块三活动连接所述导轨四;所述移动板二固定在所述滑块四上,所述滑块四连接所述齿条二,所述齿条二啮合连接所述齿轮二,所述齿轮二连接所述伺服电机四,所述伺服电机四固定在移动板二上,所述移动板二通过螺母与滑块四固定,所述滑块四活动连接所述导轨五。
[0009]
进一步的,根据本申请的一个实施例,其中,所述位移装置一、松紧装置一、位移装置一、调整装置一安装在机架上。
[0010]
进一步的,根据本申请的一个实施例,其中,还包括松紧装置二、调整装置二、位移装置二,所述松紧装置二设置在所述工件定位装置的另一侧。
[0011]
更进一步的,根据本申请的一个实施例,其中,所述松紧装置二包括:滑块五,所述滑块五上设置有固定座二,所述固定座二上安装有液压缸二,所述液压缸二连接臂力杆二,所述臂力杆二活动连接移动机械手二,所述移动机械手二一端连接套筒头二,另一端连接伺服电机五。
[0012]
更进一步的,根据本申请的一个实施例,其中,所述调整装置二包括:齿条三、齿轮三、伺服电机六、导轨六、导轨七、齿条四、齿轮四、伺服电机七、滑块六、滑块七、移动板三、移动板四,所述移动板三固定在所述滑块六上,所述滑块六连接所述齿条三,所述齿条三啮合连接所述齿轮三,所述齿轮三连接所述伺服电机六,所述伺服电机六固定在移动板三上,所述移动板三通过螺母与滑块六固定,所述滑块六活动连接所述导轨六;所述移动板四固定在所述滑块七上,所述滑块七连接所述齿条四,所述齿条四啮合连接所述齿轮四,所述齿轮四连接所述伺服电机七,所述伺服电机七固定在移动板四上,所述移动板四通过螺母与滑块七固定,所述滑块七活动连接所述导轨七。
[0013]
更进一步的,根据本申请的一个实施例,其中,所述位移装置二包括:框架二、移动框架二、滑块八、导轨八、轴承座二、滚珠丝杆二、导轨九、联轴器二、伺服电机八,所述伺服电机八通过联轴器二与滚珠丝杆二连接,所述滚珠丝杆二通过轴承座二与框架二固定。
[0014]
本申请的目的之二为提供一种与目的之一相应的螺母松紧装置的使用方法,包括以下步骤:工件放置:将工件放置在调整板上;
[0015]
工件定位:转动x手摇手柄,x滚珠丝杆转动,从而调整调整板前后位置;转动y手摇手柄,y滚珠丝杆转动,从而调整调整板左右位置,通过调整滑块调整调整螺母的开口大小,定位工件;
[0016]
松紧螺母:松紧装置一中的伺服电机一启动,带动移动机械手一转动套筒头一转动,从而拧紧或松开螺母,同时,通过液压缸一驱动连接臂力杆一转动移动机械手一,通过移动机械手一连接套筒头一,控制套筒头一的扭矩。
[0017]
进一步的,根据本申请的一个实施例,其中,还包括以下步骤:位移装置一调整松紧装置一左右移动,通过伺服电机二转动滚珠丝杆一转动,移动框架一在滑块二的作用下在导轨二和导轨三上左右移动,带动松紧装置一左右移动。
[0018]
进一步的,根据本申请的一个实施例,其中,还包括以下步骤:调整装置一调整松紧装置一上下移动和前后移动,伺服电机三驱动齿轮一下在齿条一上通过啮合的方式上下移动,所述移动板一通过滑块三在导轨四上上下移动,从而带动调整松紧装置一在上下方向移动;伺服电机四驱动齿轮二在齿条二上通过啮合的方式前后移动,移动板二通过滑块四在导轨五上前后移动,从而调整松紧装置一在前后方向移动。
[0019]
进一步的,根据本申请的一个实施例,其中,松紧螺母步骤中还包括以下步骤:松紧装置二中的伺服电机五启动,带动移动机械手二转动套筒头二转动拧紧或松开另一个方向上的螺母。
[0020]
更进一步的,根据本申请的一个实施例,其中,松紧螺母步骤中还包括以下步骤:通过液压缸二驱动连接臂力杆二转动移动机械手二,通过移动机械手一连接套筒头二,控制套筒头二的扭矩。
[0021]
更进一步的,根据本申请的一个实施例,其中,还包括以下步骤:位移装置二调整松紧装置二左右移动,通过伺服电机八转动滚珠丝杆二转动,移动框架二在滑块八的作用下在导轨八和导轨九上上下移动,带动松紧装置一上下移动。
[0022]
更进一步的,根据本申请的一个实施例,其中,还包括以下步骤:调整装置二调整松紧装置一左右移动和前后移动,伺服电机六驱动齿轮三下在齿条三上通过啮合的方式左右移动,所述移动板三通过滑块六在导轨六上左右移动,从而调整松紧装置一在左右方向移动;伺服电机七驱动齿轮四在齿条四上通过啮合的方式前后移动,移动板三通过滑块七在导轨七上前后移动,从而带动调整松紧装置一在前后方向移动。
[0023]
有益效果:通过伺服电机一带动移动机械手一转动套筒头一,给予套筒头一初始的扭矩,通过移动机械手一连接套筒头一,控制套筒头一所需的扭矩大小,松紧螺母,解决了现有技术中对螺母松紧的松紧技术中扭矩不能精确控制的问题;通过设置松紧装置一松紧螺母、位移装置一调整松紧装置一左右移动、调整装置一调整松紧装置一上下移动和前后移动,解决螺母在一个平面内任意位置难以松紧的问题,和设置松紧装置二、调整装置二、位移装置二,解决螺母在多个平面内任意位置难以松紧的问题;同时,通过调整装置一中齿轮一在伺服电机三的驱动下在齿条一上通过啮合的方式竖直移动,所述移动板一通过滑块三在导轨四上移动,齿轮二在伺服电机四的驱动下在齿条二上通过啮合的方式水平移动,所述移动板二通过滑块四在导轨五上移动,通过齿轮一与齿条一啮合方式调整松紧装置一上下移动,通过齿轮二与齿条二啮合方式前后移动,能精确地控制松紧装置一上下移动量和前后移动量,解决螺母在一个平面内任意位置难以精确松紧的问题,通过调整装置二,能精确地控制松紧装置二上下移动量和左右移动量,解决螺母在多个平面内任意位置难以精确松紧的问题。
附图说明
[0024]
下面结合附图和实施例对本申请进一步说明。
[0025]
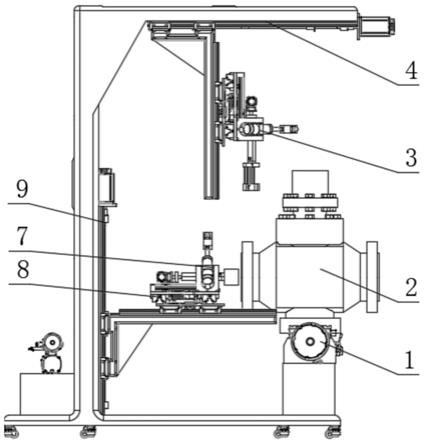
图1是本申请螺母松紧装置的主视图。
[0026]
图2是图1所示的螺母松紧装置的侧视图。
[0027]
图3是图1所示的螺母松紧装置的俯视图。
[0028]
图4是工件定位装置的主视图。
[0029]
图5是图4所示的工件定位装置的俯视图。
[0030]
图6是图4中a向剖视图。
[0031]
图7是工件的主视图。
[0032]
图8是图7所示工件的俯视图。
[0033]
图9是松紧装置一的结构示意图。
[0034]
图10是图9中b向剖视图。
[0035]
图11是位移装置一主视图。
[0036]
图12是图11所示的位移装置一的俯视图。
[0037]
图13是调整装置一的结构示意图。
[0038]
图14是图13中c向局部剖视图。
[0039]
图15是图13中d向局部剖视图。
[0040]
图16是松紧装置二的结构示意图。
[0041]
图17是图16中f向局部剖视图。
[0042]
图18是调整装置二的结构示意图
[0043]
图19是图18中g向剖视图。
[0044]
图20是图18中h向剖视图。
[0045]
图21是位移装置二主视图。
[0046]
图22是位移装置二俯视图。
[0047]
附图中
[0048]
1、工件定位装置
ꢀꢀꢀꢀꢀꢀꢀꢀ
101、x手摇手柄
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
102、轴承
[0049]
103、x滚珠丝杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
104、调整板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
105、调整滑块
[0050]
106、调整螺母
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
107、y滚珠丝杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
108、y手摇手柄
[0051]
109、y固定台
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
110、x固定台
[0052]
2、工件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21、水平方向螺母
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22、竖直方向螺母
[0053]
3、松紧装置一
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
301、滑块一
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
302、固定座一
[0054]
303、液压缸一
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
304、连接臂力杆一
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
305、移动机械手一
[0055]
306、套筒头一
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
307、伺服电机一
[0056]
4、位移装置一
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
401、框架一
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
402、移动框架一
[0057]
403、滑块二
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
404、导轨二
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
405、轴承座一
[0058]
406、滚珠丝杆一
ꢀꢀꢀꢀꢀꢀꢀꢀ
407、导轨三
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
408、联轴器一
[0059]
409、伺服电机二
[0060]
5、机架
[0061]
6、调整装置一
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
601、齿条一
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
602、齿轮一
[0062]
603、伺服电机一
ꢀꢀꢀꢀꢀꢀꢀꢀ
604、导轨四
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
605、导轨五
[0063]
606、齿条二
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
607、齿轮二
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
608、伺服电机四
[0064]
609、滑块三
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
610、滑块四
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
611、移动板一
[0065]
612、移动板二
[0066]
7、松紧装置二
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
701、滑块五
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
702、固定座二
[0067]
703、液压缸二
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
704、连接臂力杆二
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
705、移动机械手二
[0068]
706、套筒头二
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
707、伺服电机五
[0069]
8、调整装置二
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
801、齿条三
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
802、齿轮三
[0070]
803、伺服电机六
ꢀꢀꢀꢀꢀꢀꢀ
804、导轨六
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
805、导轨七
[0071]
806、齿条四
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
807、齿轮四
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
808、伺服电机七
[0072]
809、滑块六
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
810、滑块七
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
811、移动板三
[0073]
812、移动板四
[0074]
9、位移装置二
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
901、框架二
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
902、移动框架二
[0075]
903、滑块八
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
904、导轨八
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
905、轴承座二
[0076]
906、滚珠丝杆二
ꢀꢀꢀꢀꢀꢀꢀ
907、导轨九
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
908、联轴器二
[0077]
909、伺服电机八
具体实施方式
[0078]
为了使本发明的目的、技术方案进行清楚、完整地描述,及优点更加清楚明白,以下结合附图对本发明实施例进行进一步详细说明。应当理解,此处所描述的具体实施例是本发明一部分实施例,而不是全部的实施例,仅仅用以解释本发明实施例,并不用于限定本发明实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0079]
在本发明的描述中,需要说明的是,术语“中心”、“中”“上”、“下”、“左”、“右”、“内”、“外”、“顶”、“底”、“侧”、“竖直”、“水平”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“一”、“第一”、“第二”、“第三”、“第四”、“第五”、“第六”仅用于描述目的,而不能理解为指示或暗示相对重要性。
[0080]
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
[0081]
出于简明和说明的目的,实施例的原理主要通过参考例子来描述。在以下描述中,很多具体细节被提出用以提供对实施例的彻底理解。然而明显的是。对于本领域普通技术人员,这些实施例在实践中可以不限于这些具体细节。在一些实例中,没有详细地描述公知方法和结构,以避免无必要地使这些实施例变得难以理解。另外,所有实施例可以互相结合使用。
[0082]
实施例1
[0083]
如图1-3所示,当只需要松紧工件上一个平面上的螺母时,本申请公开了一种螺母松紧装置,包括:,工件定位装置1、松紧装置一3、位移装置一4、机架5、调整装置一6、,所述工件定位装置1上活动连接工件,所述工件定位装置1上方设置松紧装置一3,所述松紧装置一3活动连接位移装置一4,所述位移装置一4固定在机架5上,所述松紧装置一3还活动连接调整装置一6。
[0084]
如图4-6所示,工件定位装置1包括:x手摇手柄101,所述x手摇手柄101活动连接有x滚珠丝杆103,所述x手摇手柄101与所述x滚珠丝杆103之间设置有轴承102,所述x滚珠丝杆103活动连接调整板104,所述调整板104上活动连接有调整滑块105、调整螺母106,所述调整螺母106用于调整调整板104的位置,所述调整板104还活动连接在y滚珠丝杆107上,所述y滚珠丝杆107活动连接有y手摇手柄108,所述y滚珠丝杆107连接在y固定台109上,所述x
滚珠丝杆103连接在x固定台110上;x手摇手柄101通过螺纹与x滚珠丝杆103连接在轴承102定位的情况下转动可以使得调整板105前后移动,y手摇手柄108通过螺纹转动y滚珠丝杆107转动可以使得调整板105前后移动,调整滑块105通过调整螺母106可以控制开口的大小,可以根据工件直径的不同进行调节定位。
[0085]
如图7、8所示,松紧装置一3,包括:滑块一301,所述滑块一301上设置有固定座一302,所述固定座一302上安装有液压缸一303,所述液压缸一303连接臂力杆一304,所述臂力杆一304活动连接移动机械手一305,所述移动机械手一305一端连接套筒头一306,另一端连接伺服电机一307。
[0086]
如图11-12所示,位移装置一4包括该框架一401、移动框架一402、滑块二403、导轨二404、轴承座一405、滚珠丝杆一406、导轨三407、联轴器一408、伺服电机二409,所述伺服电机二409通过联轴器一408与滚珠丝杆一406连接,所述滚珠丝杆一406通过轴承座一405与框架一401固定,所述移动框架一402与所述滑块二403连接,所述滑块二403活动连接导轨二404、导轨三407,在伺服电机二409通电驱动下,滚珠丝杆一406运动,使得移动框架一402在滑块二403的作用下在导轨二404与导轨三407之间左右移动,从而控制松紧螺母时的定位。
[0087]
如图13-15所示,调整装置一6包括:齿条一601、齿轮一602、伺服电机三603、导轨四604、导轨五605、齿条二606、齿轮二607、伺服电机四608、滑块三609、滑块四610、移动板一611、移动板二612,所述移动板一611固定在所述滑块三609上,所述齿条一601连接移动板一611,所述齿条一601啮合连接所述齿轮一602,所述齿轮一602连接所述伺服电机三603,所述伺服电机三603固定在移动板一611上,所述移动板一611通过螺母与滑块三609固定,所述滑块三609活动连接所述导轨四604,所述齿轮一602在伺服电机三603的驱动下在齿条一601上通过啮合的方式竖直移动,所述移动板一611通过滑块三609在导轨四604上移动;所述移动板二612固定在所述滑块四610上,所述齿条二606练级移动板二612,所述齿条二606啮合连接所述齿轮二607,所述齿轮二607连接所述伺服电机四608,所述伺服电机四608固定在移动板二612上,所述移动板二612通过螺母与滑块四610固定,所述滑块四610活动连接所述导轨五605,所述齿轮二607在伺服电机四608的驱动下在齿条二606上通过啮合的方式水平移动,所述移动板二612通过滑块四610在导轨五605上移动。
[0088]
实施例2
[0089]
在具有实施例1相同结构的基础上,当需要松紧工件多平面位置螺母时,如图9-10所示,工件2上具有水平方向螺母21、竖直方向螺母22,所述水平方向螺母21是设置在水平位置面的螺母,所述竖直方向螺母22是设置在竖直位置面的螺母,本实施例还具有以下结构:松紧装置二7、调整装置二8、位移装置二9,所述工件定位装置1后方设置有松紧装置二7,所述松紧装置二7活动连接调整装置二一8,所述松紧装置二7还活动连接位移装置二9。
[0090]
如图16-17所示,松紧装置二7,包括:滑块五701,所述滑块五701上设置有固定座二702,所述固定座二702上安装有液压缸二703,所述液压缸二703连接臂力杆二704,所述臂力杆二704活动连接移动机械手二705,所述移动机械手二705一端连接套筒头二706,另一端连接伺服电机五707。
[0091]
如图18-20所示,调整装置二8包括:齿条三801、齿轮三802、伺服电机六803、导轨六804、导轨七805、齿条四806、齿轮四807、伺服电机七808、滑块六809、滑块七810、移动板
三811、移动板四812,所述移动板三811固定在所述滑块六809上,所述滑块六803连接所述齿条三801,所述齿条三801啮合连接所述齿轮三802,所述齿轮三802连接所述伺服电机六803,所述伺服电机六803固定在移动板三811上,所述移动板三811通过螺母与滑块六809固定,所述滑块六809活动连接所述导轨六804,所述齿轮三802在伺服电机六803的驱动下在齿条三801上通过啮合的方式上下移动,所述移动板三811通过滑块六809在导轨六804上移动;所述移动板四812固定在所述滑块七810上,所述滑块七810连接所述齿条四806,所述齿条四806啮合连接所述齿轮四807,所述齿轮四807连接所述伺服电机七808,所述伺服电机七808固定在移动板四812上,所述移动板四812通过螺母与滑块七810固定,所述滑块七810活动连接所述导轨七805,所述齿轮四807在伺服电机七808的驱动下在齿条四806上通过啮合的方式左右移动,所述移动板四812通过滑块七810在导轨七805上移动。
[0092]
如图21-22所示,位移装置二9包括:框架二901、移动框架二902、滑块八903、导轨八904、轴承座二905、滚珠丝杆二906、导轨九907、联轴器二908、伺服电机八909,所述伺服电机八909通过联轴器二908与滚珠丝杆二906连接,所述滚珠丝杆二906通过轴承座二905与框架二901固定,在伺服电机八909通电驱动下,滚珠丝杆二906运动,使得移动框架二902在滑块八903的作用下在导轨八904与导轨九907之间左右移动,从而控制拧螺母装置的定位。
[0093]
如图1-22所示,本申请实施例还公开了一种螺母松紧装置的使用方法,包括以下步骤:
[0094]
工件放置:将工件2放置在调整板104上;
[0095]
工件定位:转动x手摇手柄101,x滚珠丝杆103转动,调整调整板104前后位置;转动y手摇手柄108,y滚珠丝杆107转动,调整调整板104左右位置,通过调整滑块调整调整螺母106开口大小,定位工件;
[0096]
松紧螺母:松紧装置一3拧紧或松开水平方向螺母21,伺服电机一307启动,带动移动机械手一305转动套筒头一306转动拧紧或松开水平方向螺母21;通过液压缸一303驱动连接臂力杆一304转动移动机械手一305,移动机械手一305为套筒头一306增加扭矩,通过伺服电机一带动移动机械手一转动套筒头一,给予套筒头一初始的扭矩,通过移动机械手一连接套筒头一,控制套筒头一所需的扭矩大小松紧螺母,解决了现有技术中对螺母松紧的松紧技术中扭矩不能精确控制的问题。
[0097]
进一步的,本申请实施例中,松紧装置二7拧紧或松开竖直方向螺母22,伺服电机五707启动,带动移动机械手二705转动套筒头二706转动拧紧或松开竖直方向螺母22。
[0098]
进一步的,本申请实施例中,通过液压缸二703驱动连接臂力杆二704转动移动机械手二705,移动机械手二705为套筒头二706增加扭矩,通过伺服电机五带动移动机械手二转动套筒头二,给予套筒头二初始的扭矩,通过移动机械手二连接套筒头二,控制套筒头二所需的扭矩大小松紧螺母,解决了现有技术中对螺母松紧的松紧技术中扭矩不能精确控制的问题。
[0099]
进一步的,本申请实施例中,位移装置一4调整松紧装置一3左右移动,通过伺服电机二409转动滚珠丝杆一406转动,移动框架一402在滑块二403的作用下在导轨二404和导轨三407上左右移动,带动松紧装置一3左右移动;调整装置一6调整松紧装置一3上下移动和前后移动,伺服电机三603驱动齿轮一602下在齿条一601上通过啮合的方式上下移动,所
述移动板一611通过滑块三609在导轨四604上上下移动,从而带动调整松紧装置一3在上下方向移动;伺服电机四608驱动齿轮二607在齿条二606上通过啮合的方式前后移动,移动板二612通过滑块四610在导轨五605上前后移动,从而调整松紧装置一3在前后方向移动,以调整不同位置拧紧或松开水平方向螺母21,通过位移装置一调整松紧装置一左右移动、调整装置一调整松紧装置一上下移动和前后移动,解决螺母在一个平面内任意位置难以松紧的问题,所述移动板二通过滑块四在导轨五上移动,通过齿轮一与齿条一啮合方式调整松紧装置一上下移动,通过齿轮二与齿条二啮合方式前后移动,能精确地控制松紧装置一上下移动量和前后移动量,解决螺母在一个平面内任意位置难以精确松紧的问题。
[0100]
进一步的,本申请实施例中,位移装置二9调整松紧装置二7左右移动,通过伺服电机八909转动滚珠丝杆二906转动,移动框架二902在滑块八903的作用下在导轨八904和导轨九907上上下移动,带动松紧装置一3上下移动;调整装置二8调整松紧装置一3左右移动和前后移动,伺服电机六803驱动齿轮三802下在齿条三801上通过啮合的方式左右移动,所述移动板三811通过滑块六809在导轨六804上左右移动,从而调整松紧装置一3在左右方向移动;伺服电机七808驱动齿轮四807在齿条四806上通过啮合的方式前后移动,移动板三812通过滑块七810在导轨七505上前后移动,从而带动调整松紧装置一3在前后方向移动,以调整不同位置拧紧或松开水平方向螺母21;设置松紧装置二、调整装置二、位移装置二,解决螺母在多个平面内任意位置难以松紧的问题,通过调整装置二,能精确地控制松紧装置二上下移动量和左右移动量,解决螺母在多个平面内任意位置难以精确松紧的问题。
[0101]
进一步的,本申请实施例中,启动设备前,检查设备周边有无安全隐患。
[0102]
尽管上面对本发明说明性的具体实施方式进行了描述,以便于本技术领域的技术人员能够理解本发明,但是本发明不仅限于具体实施方式的范围,对本技术领域的普通技术人员而言,只要各种变化只要在所附的权利要求限定和确定的本发明精神和范围内,一切利用本发明构思的发明创造均在保护之列。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1