一种高精密中心组节能智能制造方法与流程
[0001]
本发明涉及中心组加工技术领域,具体涉及一种高精密中心组节能智能制造方法。
背景技术:
[0002]
针织大圆机,学名针织圆形纬编机。由于针织大圆机的成圈系统多,转速高、产量高、花形变化快、织物品质好、工序少、产品适应性强,所以发展很快,其中心组是针织大圆机的心脏所在,主要由针筒、织针、三角和三角座等部件组成,其中三角座固定于中心组固定件上,用于带动三角座上的三角上下运动。
[0003]
三角又称山角、菱角。它是根据针织大圆机编织品种的不同需要,控制织针和沉降片在针筒槽内做往复运动。三角具有成圈三角(全针三角)、集圈三角(半针三角)、浮线三角(平针三角)、防串三角(胖花三角)、插针三角(打样三角)五种。
[0004]
织针在三角上面的轨道滑动,完成从纱线到织物的工作。因此对三角与三角之间连接处的配合要求较高。
[0005]
现有技术中对三角块的加工通常是对单个三角块进行加工,再将多个单独加工的三角块安放在三角座上,形成成圈三角,由于单个加工三角块的加工效率较低,且多个单独加工的三角块在连接配合上也难把握相邻三角的配合关系。
[0006]
鉴于此,本案发明人对上述问题进行深入研究,遂有本案产生。
技术实现要素:
[0007]
本发明的目的在于提供一种高精密中心组节能智能制造方法,以解决背景技术中提到的单个加工三角块的加工效率较低,且多个单独加工的三角块在连接配合上也难把握相邻三角的配合关系的问题。
[0008]
为了达到上述目的,本发明采用这样的技术方案:
[0009]
一种高精密中心组节能智能制造方法,包括如下步骤:
[0010]
(1)对待加工的环形三角毛坯进行定位;
[0011]
(2)对定位后的环形三角毛坯的侧壁进行加工,使环形三角毛坯的侧壁上形成供织针滑动的跑道凸起;
[0012]
(3)将侧壁上形成跑道凸起的环形三角毛坯切割成多个沿着环形三角轴线排列的三角块单体;
[0013]
在步骤(2)中,旋转驱动装置驱动第一切割装置环绕环形三角毛坯的侧壁旋转,对环形三角毛坯的侧壁进行加工,使环形三角毛坯的侧壁形成跑道凸起。
[0014]
进一步,在步骤(1)中,通过第一定位装置对待加工的环形三角毛坯进行定位。
[0015]
进一步,所述第一定位装置包括对环形三角毛坯进行定位的第一定位部件。
[0016]
进一步,所述第一定位部件包括多个对环形三角毛坯进行定位的定位座。
[0017]
进一步,所述定位座包括支撑环形三角毛坯的支撑部,和对环形三角毛坯的外侧
壁进行抵顶的抵顶部。
[0018]
进一步,所述支撑部上设有引导环形三角毛坯逐渐滑入的导入部。
[0019]
进一步,所述导入部包括从支撑部的上表面向内端面的方向逐渐向下倾斜设置的导入斜面。
[0020]
进一步,多个所述定位座环绕环形三角毛坯等间距设置。
[0021]
进一步,所述第一定位装置还包括引导多个定位座逐渐向内滑动对环形三角毛坯进行定位的引导装置。
[0022]
进一步,所述引导装置包括引导多个定位座逐渐向内移动对环形三角毛坯进行定位的引导部。
[0023]
进一步,所述引导部的上表面形成有多个与各定位座一一对应的滑动槽;所述定位座滑动连接于所述滑动槽内。
[0024]
进一步,所述定位座的一侧向外延伸有第一卡接块,定位座的另一侧向外延伸有第二卡接块;所述滑动槽的一侧设有与第一卡接块相匹配的第一卡接槽,所述滑动槽的另一侧设有与第二卡接块相匹配的第二卡接槽;所述定位座的第一卡接块和第二卡接块分别与第一卡接槽和第二卡接槽滑动连接。
[0025]
进一步,所述第一定位装置还包括驱动多个定位座在滑动槽内滑动顶紧三角毛坯的顶紧驱动装置。
[0026]
进一步,在步骤(2)中,在环形三角毛坯的侧壁上加工出弧形闭环的跑道凸起。
[0027]
进一步,通过凸起加工装置在环形三角毛坯的侧壁上加工出供织针滑动的弧形闭环跑道凸起。
[0028]
进一步,所述凸起加工装置包括对环形三角毛坯进行切割的第一切割装置。
[0029]
进一步,所述第一切割装置包括对环形三角毛坯的侧壁进行旋转切割的旋转切割部件。
[0030]
进一步,所述旋转切割部件包括对环形三角毛坯的侧壁进行旋转切割逐渐形成跑道凸起的旋转切割枪。
[0031]
进一步,所述旋转切割枪包括与侧壁接触的旋转切割头。
[0032]
进一步,所述旋转切割部件还包括驱动旋转切割枪转动的切割转动驱动装置;所述切割转动驱动装置的输出端和旋转切割枪连接在一起。
[0033]
进一步,所述第一切割装置还包括驱动旋转切割头沿预定的轨迹移动对环形三角毛坯的侧壁进行旋转切割的移动驱动装置。
[0034]
进一步,所述移动驱动装置包括驱动旋转切割部件上下运动的第一升降驱动装置,和驱动旋转切割部件前后运动的第一伸缩驱动装置;所述第一升降驱动装置的输出端和旋转切割部件连接在一起,所述第一伸缩驱动装置的输出端和第一升降驱动装置连接在一起。
[0035]
进一步,所述凸起加工装置还包括驱动第一切割装置环绕环形三角毛坯内侧壁转动的旋转驱动装置;所述旋转驱动装置的输出端和第一切割装置连接在一起。
[0036]
进一步,在步骤(3)中,通过切块机构将环形三角毛坯切割成多个三角块单体。
[0037]
进一步,所述切块机构包括将环形三角逐一切割成多个三角块单体的切块装置。
[0038]
进一步,所述切块装置包括将环形三角切割成多个三角块的激光切割装置。
[0039]
进一步,所述激光切割装置包括对环形三角的表面进行切割的激光切割部件。
[0040]
进一步,所述激光切割部件包括对环形三角进行切割的激光切割枪。
[0041]
进一步,所述激光切割装置还包括驱动激光切割部件沿预定轨迹移动的动力驱动装置。
[0042]
进一步,所述动力驱动装置包括驱动激光切割枪左右移动的第一动力气缸,和驱动激光切割枪上下移动的第二动力气缸;所述第一动力气缸的输出端和激光切割部件连接在一起,所述第二动力气缸的输出端和第一动力气缸连接在一起。
[0043]
进一步,所述切块机构还包括在切割前对环形三角进行定位的第二定位装置。
[0044]
进一步,所述第二定位装置包括承载环形三角的第二定位部件。
[0045]
进一步,所述第二定位部件包括多个对环形三角进行支撑的定位块。
[0046]
进一步,所述定位块包括承载环形三角的承载部,和卡接于环形三角内侧壁的卡接部。
[0047]
进一步,相邻的所述定位块之间具有激光切割枪向下切割的切割空间。
[0048]
进一步,多个定位块环绕环形三角等间距设置。
[0049]
进一步,所述切块机构还包括驱动环形三角转动的三角转动驱动装置。
[0050]
进一步,所述三角转动驱动装置包括第一齿轮、第二齿轮,和驱动第二齿轮转动的转动电机;多个所述定位块设于第一齿轮的上表面,所述第一齿轮和第二齿轮相啮合,所述转动电机的输出端和第二齿轮连接在一起。
[0051]
进一步,还包括对第一齿轮和第二齿轮进行支撑的支撑台。
[0052]
采用上述结构后,本发明涉及的一种高精密中心组节能智能制造方法,其至少有以下有益效果:
[0053]
通过对环形三角毛坯进行定位后,在环形三角毛坯的侧壁上加工出供织针滑动的跑道凸起,通过一次性对环形三角毛坯加工成型,再将加工出跑道凸起的环形三角逐一切割成相等的三角块单体,一次性对环形三角加工出跑道凸起再切块,提高三角块的加工效率,且因三角块是从同一环形三角上切下,使三角块的切割面与相邻的三角块的切割面更容易配合连接在一起,降低配合误差;本发明通过一次性在环形三角毛坯的侧壁上加工出供织针滑动的跑道凸起,再将加工出跑道凸起的环形三角逐个切割成等同的三角块单体,在提高加工效率的同时,更利于安装在三角座上的相邻两个三角块之间的配合连接,降低配合误差。
附图说明
[0054]
图1为本发明涉及一种高精密中心组节能智能制造方法的制造装置的立体结构示意图;
[0055]
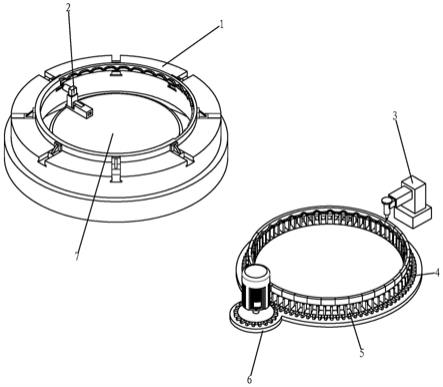
图2为本发明涉及一种高精密中心组节能智能制造方法的第一定位装置和凸起加工装置的立体结构示意图;
[0056]
图3为本发明涉及一种高精密中心组节能智能制造方法的定位座的立体结构示意图;
[0057]
图4为本发明涉及一种高精密中心组节能智能制造方法的切块机构的立体结构示意图;
[0058]
图5为本发明涉及一种高精密中心组节能智能制造方法的切块装置的立体结构示意图;
[0059]
图6为本发明涉及一种高精密中心组节能智能制造方法的第二定位装置的立体结构示意图。
[0060]
图中:1-第一定位装置,11-第一定位部件,111-定位座,1111-支撑部,1112-抵顶部,1113-导入部,12-引导装置,121-引导部,1211-滑动槽,1114-第一卡接块,1115-第二卡接块,1212-第一卡接槽,1213-第二卡接槽,2-第一切割装置,21-旋转切割部件,211-旋转切割枪,2111-旋转切割头,212-切割转动驱动装置,22-移动驱动装置,221-第一升降驱动装置,222-第一伸缩驱动装置,3-切块装置,31-激光切割装置,311-激光切割部件,3111-激光切割枪,312-动力驱动装置,3121-第一动力气缸,3122-第二动力气缸,4-第二定位装置,41-第二定位部件,411-定位块,4111-承载部,4112-卡接部,5-三角转动驱动装置,51-第一齿轮,52-第二齿轮,53-转动电机,6-支撑台,7-旋转驱动装置。
具体实施方式
[0061]
为了进一步解释本发明的技术方案,下面通过具体实施例进行详细阐述。
[0062]
如图1至图6所示,本发明的一种高精密中心组节能智能制造方法,包括如下步骤:
[0063]
(1)对待加工的环形三角毛坯进行定位;
[0064]
(2)对定位后的环形三角毛坯的侧壁进行加工,使环形三角毛坯的侧壁上形成供织针滑动的跑道凸起;
[0065]
(3)将侧壁上形成跑道凸起的环形三角毛坯切割成多个沿着环形三角轴线排列的三角块单体;
[0066]
在步骤(2)中,旋转驱动装置7驱动第一切割装置2环绕环形三角毛坯的侧壁旋转,对环形三角毛坯的侧壁进行加工,使环形三角毛坯的侧壁形成跑道凸起。
[0067]
优选地,在步骤(1)中,通过第一定位装置1对待加工的环形三角毛坯进行定位。通过第一定位装置1对环形三角毛坯进行定位,便于后续对定位好的环形三角毛坯进行加工。
[0068]
优选地,为了便于对环形三角毛坯进行加工,第一定位装置1包括对环形三角毛坯进行定位的第一定位部件11。
[0069]
优选地,为了便于对环形三角毛坯进行加工,第一定位部件11包括多个对环形三角毛坯进行定位的定位座111。
[0070]
优选地,定位座111包括支撑环形三角毛坯的支撑部1111,和对环形三角毛坯的外侧壁进行抵顶的抵顶部1112。将环形三角毛坯放于多个定位座111的支撑部1111上,抵顶部1112防止环形三角毛坯位移,有利于提高加工效率和加工的精确度。
[0071]
优选地,为了使环形三角毛坯在定位时更流畅,支撑部1111上设有引导环形三角毛坯逐渐滑入的导入部1113。
[0072]
优选地,为了使环形三角毛坯在定位时更流畅,导入部1113包括从支撑部1111的上表面向内端面的方向逐渐向下倾斜设置的导入斜面。
[0073]
优选地,为了提高定位效果,多个定位座111环绕环形三角毛坯等间距设置。
[0074]
优选地,为了使定位更精准,第一定位装置1还包括引导多个定位座111逐渐向内滑动对环形三角毛坯进行定位的引导装置12。
[0075]
优选地,为了使定位更精准,引导装置12包括引导多个定位座111逐渐向内移动对环形三角毛坯进行定位的引导部121。
[0076]
优选地,引导部121的上表面形成有多个与各定位座111一一对应的滑动槽1211;定位座111滑动连接于滑动槽1211内。各定位座111分别在对应的滑动槽1211内滑动,通过滑动槽1211对定位座111进行导向,使定位座111对环形三角毛坯的定位精度更高。
[0077]
优选地,为了防止定位座111在加工时候产生振动时上下位移导致环形三角毛坯上下位移,定位座111的一侧向外延伸有第一卡接块1114,定位座111的另一侧向外延伸有第二卡接块1115;滑动槽1211的一侧设有与第一卡接块1114相匹配的第一卡接槽1212,滑动槽1211的另一侧设有与第二卡接块1115相匹配的第二卡接槽1213;定位座111的第一卡接块1114和第二卡接块1115分别与第一卡接槽1212和第二卡接槽1213滑动连接。
[0078]
优选地,第一定位装置1还包括驱动多个定位座111在滑动槽1211内滑动顶紧三角毛坯的顶紧驱动装置。通过顶紧驱动装置驱动定位座111对环形三角毛坯进行定位,加工完后驱动定位座111松开环形三角毛坯便于转移。
[0079]
优选地,在步骤(2)中,在环形三角毛坯的侧壁上加工出弧形闭环的跑道凸起。
[0080]
优选地,通过凸起加工装置在环形三角毛坯的侧壁上加工出供织针滑动的弧形闭环跑道凸起。
[0081]
优选地,凸起加工装置包括对环形三角毛坯进行切割的第一切割装置2。通过第一切割装置2在环形三角毛坯内侧壁逐渐加工出供织针滑动的弧形闭环跑道凸起。
[0082]
优选地,第一切割装置2包括对环形三角毛坯的侧壁进行旋转切割的旋转切割部件21。通过旋转切割部件21在环形三角毛坯内侧壁逐渐加工出供织针滑动的弧形闭环跑道凸起。
[0083]
优选地,旋转切割部件21包括对环形三角毛坯的侧壁进行旋转切割逐渐形成跑道凸起的旋转切割枪211。通过旋转切割枪211在环形三角毛坯内侧壁逐渐加工出供织针滑动的弧形闭环跑道凸起。
[0084]
优选地,旋转切割枪211包括与侧壁接触的旋转切割头2111。通过旋转切割头2111在环形三角毛坯内侧壁逐渐加工出供织针滑动的弧形闭环跑道凸起。
[0085]
优选地,旋转切割部件21还包括驱动旋转切割枪211转动的切割转动驱动装置212;切割转动驱动装置212的输出端和旋转切割枪211连接在一起。通过切割转动驱动装置212驱动旋转切割枪211高速转动,逐渐在内侧壁上加工出供织针滑动的弧形闭环跑道凸起;具体地,切割转动驱动装置212为电机驱动。
[0086]
优选地,第一切割装置2还包括驱动旋转切割头2111沿预定的轨迹移动对环形三角毛坯的侧壁进行旋转切割的移动驱动装置22。通过移动驱动装置22驱动旋转切割部件21对环形三角毛坯的内侧壁切割一定的深度后,再环绕环形三角毛坯内侧壁逐渐切割出闭环的跑道凸起。
[0087]
优选地,移动驱动装置22包括驱动旋转切割部件21上下运动的第一升降驱动装置221,和驱动旋转切割部件21前后运动的第一伸缩驱动装置222;第一升降驱动装置221的输出端和旋转切割部件21连接在一起,第一伸缩驱动装置222的输出端和第一升降驱动装置221连接在一起。通过第一升降驱动装置221驱动旋转切割部件21上下运动,将内侧壁加工成弧形段,第一伸缩驱动装置222驱动旋转切割部件21沿环形三角毛坯径向旋转切割,在深
入一定深度后,再通过旋转驱动装置7驱动第一切割装置2环绕环形三角毛坯运动,旋转切割出弧形闭环的跑道凸起。
[0088]
优选地,凸起加工装置还包括驱动第一切割装置2环绕环形三角毛坯内侧壁转动的旋转驱动装置7;旋转驱动装置7的输出端和第一切割装置2连接在一起。通过旋转驱动装置7驱动第一切割装置2环绕环形三角毛坯运动,旋转切割出弧形闭环的跑道凸起;具体地,旋转驱动装置7为旋转气缸。
[0089]
优选地,在步骤(3)中,通过切块机构将环形三角毛坯切割成多个三角块单体。
[0090]
优选地,切块机构包括将环形三角逐一切割成多个三角块单体的切块装置3。通过切块装置3将环形三角切割成三角块单体,便于使用。
[0091]
优选地,切块装置3包括将环形三角切割成多个三角块的激光切割装置31。激光切割装置31极速高效省成本,同时避免了对工件造成损伤破坏工件精度。
[0092]
优选地,为了提高切割效率,激光切割装置31包括对环形三角的表面进行切割的激光切割部件311。
[0093]
优选地,为了提高切割效率,激光切割部件311包括对环形三角进行切割的激光切割枪3111。
[0094]
优选地,激光切割装置31还包括驱动激光切割部件311沿预定轨迹移动的动力驱动装置312。通过动力驱动装置312驱动激光切割部件311移动,将环形三角完整切割。
[0095]
优选地,动力驱动装置312包括驱动激光切割枪3111左右移动的第一动力气缸3121,和驱动激光切割枪3111上下移动的第二动力气缸3122;第一动力气缸3121的输出端和激光切割部件311连接在一起,第二动力气缸3122的输出端和第一动力气缸3121连接在一起。通过控制激光切割枪3111上下左右移动,将环形三角完整切割。
[0096]
优选地,为了便于激光切割装置31对环形三角进行切割,切块机构还包括在切割前对环形三角进行定位的第二定位装置4。
[0097]
优选地,第二定位装置4包括承载环形三角的第二定位部件41。通过第二定位部件41对环形三角进行定位处理。
[0098]
优选地,第二定位部件41包括多个对环形三角进行支撑的定位块411。通过定位块411对环形三角进行定位处理。
[0099]
优选地,定位块411包括承载环形三角的承载部4111,和卡接于环形三角内侧壁的卡接部4112。将环形三角放于承载部4111上,卡接部4112卡接于内侧壁上,防止环形三角位移。
[0100]
优选地,为了避免定位块411在激光切割枪3111作业时发生干涉,相邻的定位块411之间具有激光切割枪3111向下切割的切割空间。
[0101]
优选地,为了使定位块411对环形三角的定位效果更好,多个定位块411环绕环形三角等间距设置。
[0102]
优选地,切块机构还包括驱动环形三角转动的三角转动驱动装置5。通过转动驱动装置驱动环形三角在激光切割装置31切割后每次转动同样的角度,将环形三角切割成完全相同的三角块单体。
[0103]
优选地,三角转动驱动装置5包括第一齿轮51、第二齿轮52,和驱动第二齿轮52转动的转动电机53;多个定位块411设于第一齿轮51的上表面,第一齿轮51和第二齿轮52相啮
合,转动电机53的输出端和第二齿轮52连接在一起。通过转动电机53驱动第二齿轮52转动,第二齿轮52与第一齿轮51相啮合,使第一齿轮51转动,第一齿轮51带动定位块411转动,定位块411上的环形三角同时转动。
[0104]
优选地,为了使整体结构更稳定可靠,还包括对第一齿轮51和第二齿轮52进行支撑的支撑台6。
[0105]
优选地,织针上具有与跑道凸起相配合的凹槽,织针通过凹槽与跑道凸起滑动连接。
[0106]
本发明的产品形式并非限于本案图示和实施例,任何人对其进行类似思路的适当变化或修饰,皆应视为不脱离本发明的专利范畴。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1