泛在电力物联网用多轴智能作业机械手的制作方法
1.本发明涉及及泛在电力设备领域,具体是泛在电力物联网用多轴智能作业机械手。
背景技术:
2.现有的供电线网主要包括主干线及分支线,主干线主要为高压线,主干线通过分支线将电源分流出去。现有将分支线接入主干线时,需要对主干线停电,再将分支线接入主干线,并通过线夹将分支线与主干线连接并固定。
3.为避免进行分支线接入主干线时,对主干线停止供电导致某一片区域停电,一般通过自动接线设备将分支线接入主干线。
4.当前国家电网公司系统在配电网领域的带电作业需求越来越大,而人工带电作业培养周期长、安全风险和劳动强度大;现有带电作业车技术使用维护成本高、安全风险依然存在。
技术实现要素:
5.本发明的目的在于提供泛在电力物联网用多轴智能作业机械手,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案:
7.泛在电力物联网用多轴智能作业机械手,包括设备箱、线夹固定器安装盒和拧紧机构;所述设备箱的一侧开设有供线夹固定器安装盒穿出的开口,所述设备箱底部后侧设有一z轴电机安装腔,z轴电机安装腔内竖直固定安装有z轴电机,其中z轴电机的输出轴驱动连接一连接法兰,连接法兰的下端与齿条固定连接,z轴电机用于提供z轴方向上转动的动力;
8.所述设备箱的内腔后侧设有一阶梯台,阶梯台顶部固定安装有x轴电机,x轴电机用于提供x轴方向转动的动力,所述x轴电机的前端设有y轴电机,y轴电机固定安装在y轴电机安装座内,y轴电机安装座内开设有一个供y轴电机安装的矩形的y轴电机安装腔,y轴电机安装腔内固定安装有y轴电机,y轴电机安装座的侧部通过螺栓与x轴电机的输出轴固定连接;
9.所述y轴电机的输出轴与线夹固定器安装盒固定连接,所述线夹固定器安装盒包括两块侧板,两块侧板之间设有两块侧板连接板,侧板连接板与侧板固定连接,其中侧板的前端向下延伸设有倾斜延伸板;
10.所述y轴电机的输出轴与其中一块侧板固定连接;两块侧板之间装有第二直线电机和插接杆,第二直线电机的固定安装在两块侧板之间,插接杆设有两根,且两根插接杆的尾端固定连接有一插接杆连接板,第二直线电机的的输出轴与插接杆连接板的尾端固定连接;
11.所述拧紧机构包括相互扣合的拧紧壳体和拧紧壳盖,倾斜延伸板与拧紧壳体外侧
部固定连接,拧紧壳体的顶部设有一拧紧电机安装座,该拧紧电机安装座顶部固定安装有拧紧电机,拧紧电机安装座的右侧一体成型有一拧紧导向块,拧紧导向块滑动套设在拧紧导向轴,拧紧导向轴的上下两端分别与拧紧壳盖和拧紧壳体固定连接,拧紧导向轴与拧紧导向块配合设置,即拧紧导向块可以在拧紧导向轴上下滑动;所述拧紧电机的输出轴上固定安装有一拧紧头。
12.进一步的,所述拧紧头顶部开设有六边形的拧紧槽,该拧紧槽与线夹的螺栓适配。
13.再进一步的,所述拧紧槽还可以是其他的适配螺栓头部的形状。
14.进一步的,所述设备箱的前端面呈弧形。
15.进一步的,所述设备箱的外侧顶部还固定安装有摄像头,该摄像头可以将插接杆处对应的影像传输至地面,以方便操作人员进行操作。
16.与现有技术相比,本发明的有益效果是:
17.本发明的机械手能够提供多个轴上的转动操作,转向灵活,控制灵敏。
附图说明
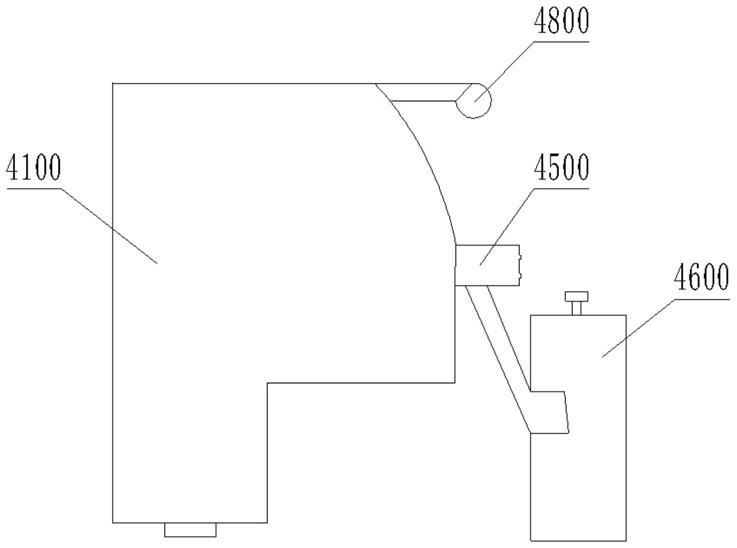
18.图1为泛在电力物联网用多轴智能作业机械手的正视图。
19.图2为泛在电力物联网用多轴智能作业机械手的结构示意图。
20.图3为泛在电力物联网用多轴智能作业机械手中y轴电机安装座的结构示意图。
21.图4为泛在电力物联网用多轴智能作业机械手中拧紧机构的结构示意图。
22.图5为泛在电力物联网用多轴智能作业机械手中拧紧头的结构示意图。
具体实施方式
23.下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
24.请参阅图1-5,泛在电力物联网用多轴智能作业机械手,包括设备箱4100、线夹固定器安装盒4500和拧紧机构4600;
25.所述设备箱4100的一侧开设有供线夹固定器安装盒4500穿出的开口,所述设备箱4100底部后侧设有一z轴电机安装腔4110,z轴电机安装腔4110内竖直固定安装有z轴电机4200,其中z轴电机4200的输出轴驱动连接一连接法兰4210,连接法兰4210的下端与齿条3400固定连接,z轴电机4200用于提供z轴方向上转动的动力;
26.所述设备箱4100的内腔后侧设有一阶梯台4120,阶梯台4120顶部固定安装有x轴电机4300,x轴电机4300用于提供x轴方向转动的动力,所述x轴电机4300的前端设有y轴电机4400,y轴电机4400固定安装在y轴电机安装座4410内,y轴电机安装座4410内开设有一个供y轴电机安装的矩形的y轴电机安装腔4411,y轴电机安装腔4411内固定安装有y轴电机4400,y轴电机安装座4410的侧部通过螺栓与x轴电机4300的输出轴固定连接;
27.所述y轴电机4400的输出轴与线夹固定器安装盒4500固定连接,所述线夹固定器安装盒4500包括两块侧板4510,两块侧板4510之间设有两块侧板连接板4511,侧板连接板4511与侧板4510固定连接,其中侧板4510的前端向下延伸设有倾斜延伸板4512;
28.所述y轴电机4400的输出轴与其中一块侧板4510固定连接;两块侧板4510之间装有第二直线电机4520和插接杆4530,第二直线电机4520的固定安装在两块侧板4510之间,插接杆4530设有两根,且两根插接杆4530的尾端固定连接有一插接杆连接板4531,第二直
线电机4520的的输出轴与插接杆连接板4531的尾端固定连接;
29.所述拧紧机构4600包括相互扣合的拧紧壳体4610和拧紧壳盖4620,倾斜延伸板4512与拧紧壳体4610外侧部固定连接,拧紧壳体4610的顶部设有一拧紧电机安装座4630,该拧紧电机安装座4630顶部固定安装有拧紧电机4631,拧紧电机安装座4630的右侧一体成型有一拧紧导向块4632,拧紧导向块4632滑动套设在拧紧导向轴4633,拧紧导向轴4633的上下两端分别与拧紧壳盖4620和拧紧壳体4610固定连接,拧紧导向轴4633与拧紧导向块4632配合设置,即拧紧导向块4632可以在拧紧导向轴4633上下滑动;
30.所述拧紧电机4631的输出轴上固定安装有一拧紧头4700,拧紧头4700顶部开设有六边形的拧紧槽4701,该拧紧槽4701与线夹的螺栓适配;
31.再进一步的,所述拧紧槽4701还可以是其他的适配螺栓头部的形状,进一步的,所述设备箱的前端面呈弧形;
32.设备箱4100的外侧顶部还固定安装有摄像头4800,该摄像头4800可以将插接杆处对应的影像传输至地面,以方便操作人员进行操作;
33.本发明的机械手能够提供多个轴上的转动操作,转向灵活,控制灵敏。
34.本方案中的x、y、z轴均为为了方便阐述本技术方案而人为设定,并无任何对本方案的有关于x、y、z轴所引申的含义的约束,亦不应当理解为对本发明的限制。
35.本方案中的电机均为步进电机,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的,控制精准。
36.上面对本专利的较佳实施方式作了详细说明,但是本专利并不限于上述实施方式,在本领域的普通技术人员所具备的知识范围内,还可以在不脱离本专利宗旨的前提下做出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1