一种生产冶金机械备件的钻床的制作方法
1.本实用新型涉及钻床领域,具体涉及一种生产冶金机械备件的钻床。
背景技术:
2.钻床指主要用钻头在工件上加工孔的机床,通常钻头旋转为主运动,钻头轴向移动为进给运动,钻床结构简单,加工精度相对较低,可钻通孔、盲孔,更换特殊刀具,可扩、锪孔,铰孔或进行攻丝等加工,加工过程中工件不动,让刀具移动,将刀具中心对正孔中心,并使刀具转动,钻床的特点是工件固定不动,刀具做旋转运动。
3.现有技术存在以下不足:现有的生产冶金机械备件的钻床在进行打孔工作时,需人工手动调节打孔,这样的打孔方式,不仅打孔精确度较低,而且操作繁琐,安全性较低。
4.因此,发明一种生产冶金机械备件的钻床很有必要。
技术实现要素:
5.为此,本实用新型提供一种生产冶金机械备件的钻床,通过工控机电性连接第一气缸、第二气缸、电机和视觉控制器,再通过视觉控制器电性连接面阵相机和光源控制器,光源控制器电性连接环形灯,达到智能机械精准打孔的效果,以解决打孔精确度较低,而且操作繁琐,安全性低的问题。
6.为了实现上述目的,本实用新型提供如下技术方案:一种生产冶金机械备件的钻床,包括机架,所述机架中间套接升降板,所述升降板上端通过直角架固定安装升降装置,所述升降板前端通过螺栓固定安装第二气缸;
7.所述升降板右端焊接滑动轴杆,所述滑动轴杆外壁通过卡接装置卡接活动板;
8.所述活动板上端通过螺栓固定安装电机,所述活动板下端卡接面阵相机,所述活动板下端卡接环形灯,所述活动板后端焊接所述卡接装置;
9.所述面阵相机电性连接视觉控制器,所述环形灯电性连接光源控制器;
10.所述升降装置、所述第二气缸、所述电机和所述视觉控制器电性连接工控机,所述视觉控制器电性连接光源控制器;
11.所述卡接装置包括卡接块,所述活动板后端焊接所述卡接块,所述卡接块卡接在所述滑动轴杆的外壁。
12.优选的,所述机架底部右端卡接固定箱。
13.优选的,所述升降装置包括第一气缸和伸缩杆,所述第一气缸通过直角架固定安装在所述机架的顶端左侧,所述伸缩杆通过螺栓固定安装在机架顶端的左端下侧。
14.优选的,所述第一气缸的输出端通过螺栓固定安装在所述升降板的顶端,所述伸缩杆下端通过螺栓固定安装在所述升降板的顶端,所述第一气缸电性连接工控机。
15.优选的,所述第二气缸输出端通过螺栓固定安装在所述活动板的左端。
16.优选的,所述电机输出端连接轴杆,所述轴杆穿过所述活动板连接钻头。
17.优选的,所述卡接装置还包括凹形卡接块,所述活动板后端焊接所述凹形卡接块,
所述凹形卡接块卡接在所述滑动轴杆的内部。
18.与现有技术相比,该生产冶金机械备件的钻床的优点:
19.本实用新型通过启动钻床,工控机将控制视觉控制器和光源控制器,开启面阵相机和环形灯进行视频定位捕捉需钻孔的物体,通过环形灯使视频定位捕捉的图像更加清晰,当通过面阵相机确定好需要打孔的区域时,面阵相机将钻孔的位置数据传输给工控机,通过工控机的智能计算,将控制第一气缸和第二气缸运作,使活动板带动钻头位置调节,再通过控制电机转动,带动钻头进行钻孔工作,起到精准定位的作用,达到智能型机械式钻孔,不仅提高了工作效率和钻孔的精准度,而且也提高了安全性。
附图说明
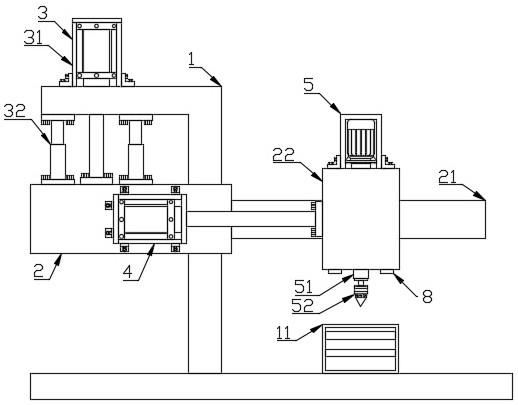
20.图1为本实用新型提供的实施例1的整体结构示意图;
21.图2为本实用新型提供的实施例1的电性连接图;
22.图3为本实用新型提供的实施例1的活动板右视图;
23.图4为本实用新型提供的实施例1的活动板俯视图;
24.图5为本实用新型提供的实施例2的卡接装置结构示意图。
25.图中:机架1、固定箱11、升降板2、滑动轴杆21、活动板22、升降装置3、第一气缸31、伸缩杆32、第二气缸4、电机5、轴杆51、钻头52、工控机6、面阵相机7、视觉控制器71、环形灯8、光源控制器81、卡接装置9、卡接块91、凹形卡接块92。
具体实施方式
26.以下结合附图对本实用新型的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本实用新型,并不用于限定本实用新型。
27.实施例1,参照附图1
‑
图4,本实用新型提供的一种生产冶金机械备件的钻床,包括机架1、升降板2、升降装置3、第二气缸4、电机5、工控机6、面阵相机7、环形灯8和卡接装置9;
28.进一步地,机架1中间套接升降板2,机架1包括固定箱11,具体的,机架1底部右端卡接固定箱11,通过机架1底部右端卡接固定箱11,起到固定作用,达到固定住被打孔物品的效果,防止被打孔物品发生偏移,影响打孔的精确度;
29.进一步地,升降板2套接在机架1的中间,升降板2包括滑动轴杆21和活动板22,具体的,升降板2右端焊接滑动轴杆21,滑动轴杆21外壁通过卡接装置9卡接活动板22,由于升降板2右端焊接滑动轴杆21,滑动轴杆21外壁通过卡接装置9卡接活动板22,升降板2套接在机架1的中间,起到移动的作用,达到使活动板22移动确定打孔区域的效果;
30.进一步地,升降装置3通过直角架固定在机架1顶端左侧,升降装置3包括第一气缸31和伸缩杆32,具体的,第一气缸31通过直角架固定安装在机架1的顶端左侧,伸缩杆32通过螺栓固定安装在机架1顶端的左端下侧,第一气缸31和第二气缸4型号为su63,第一气缸31和第二气缸4是引导活塞在缸内进行直线往复运动的圆筒形金属机件,伸缩杆32型号为ynt
‑
03,伸缩杆32是采用金属带材或塑料片材卷制而成的可伸缩空心圆柱体杆,其特征是金属带材或塑料片材预先定型为具有记忆功能的小于杆体外径的弹力卷曲层,从而具有自紧功能,使卷曲层始终具有对伸缩杆施加压力的弹性势能,电机5是三相异步电动机,由于第一气缸31通过直角架固定安装在机架1的顶端左侧,伸缩杆32通过螺栓固定安装在机架1
顶端的左端下侧,第二气缸4通过直角架固定安装在升降板2前端,第二气缸4输出端通过螺栓固定安装在活动板22左侧,活动板22上端通过直角架固定安装电机5,电机5输出端连接轴杆51,轴杆51穿过活动板22连接钻头52,通过启动第一气缸31,使升降板2上下移动,带动滑动轴杆21上下移动,从而带动活动板22上下移动,起到升降的作用,达到使活动板22具有上下移动的效果,通过启动第二气缸4,使活动板22在滑动轴杆21表面左右移动,起到移动的作用,达到使活动板22具有左右移动的效果,从而使活动板22具有机械式移动的效果,达到省时省力的效果,再通过启动电机5,使电机5带动轴杆51转动,从而使轴杆51带动钻头52,起到钻孔的作用,达到使钻床具有机械式钻孔的效果;
31.进一步地,工控机6电性连接视觉控制器71,具体的,工控机6型号为ge4800
‑
6c
‑
i7,工控机6是加固的增强型个人计算机,它可以作为工业控制器在工业环境中可靠运行,面阵相机7型号为basler ace 2,面阵相机7是表现图像细节的相机,具有高清像素的性能,视觉控制器71型号为sv
‑
100,视觉控制器71不但可以提供基于计算机系统所需的所有强大功能和灵活性,而且更能承受苛刻的工厂环境,光源控制器81型号为aftvision alp,光源控制器81是机器视觉光源控制器,主要目的是给光源供电,控制光源的亮度并控制光源照明状态,还可以通过给控制器触发信号来实现光源的频闪,进而大大延长光源的寿命,通过面阵相机7电性连接视觉控制器71,环形灯8电性连接光源控制器81,工控机6电性连接第一气缸31、第二气缸4、电机5和视觉控制器71,视觉控制器71电性连接光源控制器81,当钻床启动时,工控机6控制视觉控制器71和光源控制器81,开启面阵相机7和环形灯8进行视频定位捕捉需钻孔的物体,通过环形灯8使视频定位捕捉的图像更加清晰,当通过面阵相机7确定好需要打孔的区域时,面阵相机7将钻孔的位置数据传输给工控机6,通过工控机6的智能计算,将控制第一气缸31和第二气缸4运作,使活动板22带动钻头52位置调节,再通过控制电机5转动,带动钻头52进行钻孔工作,起到精准定位的作用,达到智能型机械式钻孔,不仅提高了工作效率和钻孔的精准度,而且也提高了安全性;
32.进一步地,卡接装置9焊接在活动板22后端,卡接装置9包括卡接块91,具体的,卡接块91焊接在活动板22后端,由于卡接块91焊接在活动板22后端,卡接块91卡接在滑动轴杆21的外壁,起到滑动和固定的作用,达到防止活动板22移动时脱落和移动时发生偏移的效果。
33.本实用新型的使用过程如下:本领域技术人员通过机架1底部右端卡接固定箱11,起到固定作用,达到固定住被打孔物品的效果,防止被打孔物品发生偏移,影响打孔的精确度,由于升降板2右端焊接滑动轴杆21,滑动轴杆21外壁通过卡接装置9卡接活动板22,升降板2套接在机架1的中间,起到移动的作用,达到使活动板22移动确定打孔区域的效果,由于第一气缸31通过直角架固定安装在机架1的顶端左侧,伸缩杆32通过螺栓固定安装在机架1顶端的左端下侧,第二气缸4通过直角架固定安装在升降板2前端,第二气缸4输出端通过螺栓固定安装在活动板22左侧,活动板22上端通过直角架固定安装电机5,电机5输出端连接轴杆51,轴杆51穿过活动板22连接钻头52,通过启动第一气缸31,使升降板2上下移动,带动滑动轴杆21上下移动,从而带动活动板22上下移动,起到升降的作用,达到使活动板22具有上下移动的效果,通过启动第二气缸4,使活动板22在滑动轴杆21表面左右移动,起到移动的作用,达到使活动板22具有左右移动的效果,从而使活动板22具有机械式移动的效果,达到省时省力的效果,再通过启动电机5,使电机5带动轴杆51转动,从而使轴杆51带动钻头
52,起到钻孔的作用,达到使钻床具有机械式钻孔的效果,通过面阵相机7电性连接视觉控制器71,环形灯8电性连接光源控制器81,工控机6电性连接第一气缸31、第二气缸4、电机5和视觉控制器71,视觉控制器71电性连接光源控制器81,当钻床启动时,工控机6控制视觉控制器71和光源控制器81,开启面阵相机7和环形灯8进行视频定位捕捉需钻孔的物体,通过环形灯8使视频定位捕捉的图像更加清晰,当通过面阵相机7确定好需要打孔的区域时,面阵相机7将钻孔的位置数据传输给工控机6,通过工控机6的智能计算,将控制第一气缸31和第二气缸4运作,使活动板22带动钻头52位置调节,再通过控制电机5转动,带动钻头52进行钻孔工作,起到精准定位的作用,达到智能型机械式钻孔,不仅提高了工作效率和钻孔的精准度,而且也提高了安全性,由于卡接块91焊接在活动板22后端,卡接块91卡接在滑动轴杆21的外壁,起到滑动和固定的作用,达到防止活动板22移动时脱落和移动时发生偏移的效果。
34.实施例2,参照附图5,本实用新型提供的一种生产冶金机械备件的钻床,包括卡接装置9;
35.进一步地,卡接装置9焊接在活动板22后端,卡接装置9还包括凹形卡接块92,凹形卡接块92焊接在活动板22后端,由于凹形卡接块92焊接在活动板22后端,凹形卡接块92卡接在滑动轴杆21的内部,起到滑动和固定的作用,达到防止活动板22移动时脱落和移动时发生偏移的效果,且增加了活动板22的水平精准度;
36.本实用新型的使用过程如下:本领域技术人员通过机架1底部右端卡接固定箱11,起到固定作用,达到固定住被打孔物品的效果,防止被打孔物品发生偏移,影响打孔的精确度,由于升降板2右端焊接滑动轴杆21,滑动轴杆21外壁通过卡接装置9卡接活动板22,升降板2套接在机架1的中间,起到移动的作用,达到使活动板22移动确定打孔区域的效果,由于第一气缸31通过直角架固定安装在机架1的顶端左侧,伸缩杆32通过螺栓固定安装在机架1顶端的左端下侧,第二气缸4通过直角架固定安装在升降板2前端,第二气缸4输出端通过螺栓固定安装在活动板22左侧,活动板22上端通过直角架固定安装电机5,电机5输出端连接轴杆51,轴杆51穿过活动板22连接钻头52,通过启动第一气缸31,使升降板2上下移动,带动滑动轴杆21上下移动,从而带动活动板22上下移动,起到升降的作用,达到使活动板22具有上下移动的效果,通过启动第二气缸4,使活动板22在滑动轴杆21表面左右移动,起到移动的作用,达到使活动板22具有左右移动的效果,从而使活动板22具有机械式移动的效果,达到省时省力的效果,再通过启动电机5,使电机5带动轴杆51转动,从而使轴杆51带动钻头52,起到钻孔的作用,达到使钻床具有机械式钻孔的效果,通过面阵相机7电性连接视觉控制器71,环形灯8电性连接光源控制器81,工控机6电性连接第一气缸31、第二气缸4、电机5和视觉控制器71,视觉控制器71电性连接光源控制器81,当钻床启动时,工控机6控制视觉控制器71和光源控制器81,开启面阵相机7和环形灯8进行视频定位捕捉需钻孔的物体,通过环形灯8使视频定位捕捉的图像更加清晰,当通过面阵相机7确定好需要打孔的区域时,面阵相机7将钻孔的位置数据传输给工控机6,通过工控机6的智能计算,将控制第一气缸31和第二气缸4运作,使活动板22带动钻头52位置调节,再通过控制电机5转动,带动钻头52进行钻孔工作,起到精准定位的作用,达到智能型机械式钻孔,不仅提高了工作效率和钻孔的精准度,而且也提高了安全性,由于凹形卡接块92焊接在活动板22后端,凹形卡接块92卡接在滑动轴杆21的内部,起到滑动和固定的作用,达到防止活动板22移动时脱落和移动时发
生偏移的效果,且增加了活动板22的水平精准度。
37.以上所述,仅是本实用新型的较佳实施例,任何熟悉本领域的技术人员均可能利用上述阐述的技术方案对本实用新型加以修改或将其修改为等同的技术方案。因此,依据本实用新型的技术方案所进行的任何简单修改或等同置换,尽属于本实用新型要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1