适用于整盘微小产品翻面的自动化机构的制作方法
1.本实用新型涉及激光加工领域,尤其是指一种适用于整盘微小产品翻面的自动化机构。
背景技术:
2.随着5g技术的不断普及,以陶瓷为基材的天线正越来越多的应用到手机等通信产品中,天线通常是一个正方体的结构,对其各个面加工过程中需要做到产品的翻面,由于各面结构完全对称,传统的振动盘无法区分各个面,同时振动过程中产品棱边和尖角会相互划伤产品表面,对实际生产过程产生极大的困扰。
技术实现要素:
3.本实用新型实施例所要解决的技术问题是:传统的振动盘无法区分各个面,同时振动过程中产品棱边和尖角会相互划伤产品表面。
4.为了解决上述技术问题,本实用新型实施例采用的技术方案为:
5.本实用新型实施例提供了一种适用于整盘微小产品翻面的自动化机构,包括底板,还包括旋转吸板组件、升降吸板组件和推料组件,所述旋转吸板组件、升降吸板组件和推料组件均设置于所述底板上,其中,
6.所述旋转吸板组件包括旋转吸板,所述旋转吸板设置于所述底板上,所述升降吸板组件设置于所述旋转吸板上方,所述推料组件设置于所述旋转吸板一侧。
7.进一步地,旋转吸板组件还包括第一驱动件、光电开关与第一吸附头,所述第一驱动件通过第一安装座固定于底板上,所述第一驱动件输出轴通过联轴器与所述旋转吸板连接,所述旋转吸板上安装有第一吸附头,所述光电开关设置于所述第一安装座靠近所述旋转吸板的一侧。
8.进一步地,所述旋转吸板一侧开设有第一真空小孔组。
9.进一步地,所述升降吸板组件包括x轴运动平台、z轴运动平台、升降吸板与第二吸附头,所述z轴运动平台安装于所述底板上,所述x轴运动平台安装于所述z轴运动平台上,且与所述z轴运动平台呈垂直设置,所述升降吸板安装于所述x轴运动平台上,且所述升降吸板设置于所述旋转吸板上方,所述升降吸板上设置有第二吸附头。
10.进一步地,所述升降吸板一侧设置有第二真空小孔组。
11.进一步地,还包括对接板组件,所述对接板组件设置于所述旋转吸板一侧,所述对接板组件包括第二驱动件与对接板,所述第二驱动件通过第二安装座安装于底板上,所述对接板与所述第二驱动件连接,且设置于所述旋转吸板一侧。
12.进一步地,所述推料组件设置于所述对接板组件上,所述推料组件包括第三驱动件与推料板,所述推料板与所述第三驱动件连接,且所述推料板、第三驱动件安装于所述对接板上。
13.进一步地,还包括物料料盘与接近开关,所述物料料盘通过支撑架固定于底板上,
且设置于所述旋转吸板另一侧,所述接近开关设置于所述物料料盘底部。
14.进一步地,所述第一真空小孔组、第二真空小孔组的小孔间距与所述物料料盘间距等距。
15.本实用新型实施例的有益效果在于:本实用新型实施例提供了一种适用于整盘微小产品翻面的自动化机构,包括底板,还包括旋转吸板组件、升降吸板组件和推料组件,所述旋转吸板组件、升降吸板组件和推料组件均设置于所述底板上,其中,所述旋转吸板组件包括旋转吸板,所述旋转吸板设置于所述底板上,所述升降吸板组件设置于所述旋转吸板上方,所述推料组件设置于所述旋转吸板一侧。通过升降吸板组件吸取物料至旋转吸板组件上方,升降吸板组件控制物料放置于底板上,推料组件将物料推至于旋转吸板处,旋转吸板吸附物料,此时升降吸板组件和推料组件退回,旋转吸板旋转90
°
,升降吸板组件下降吸取物料,放置于指定位置,即完成翻转90
°
的过程,通过吸附配合旋转的方式对物料进行翻面,稳定可靠,避免了物料棱边和尖角会相互划伤物料的表面。
附图说明
16.下面结合附图详述本实用新型的具体结构
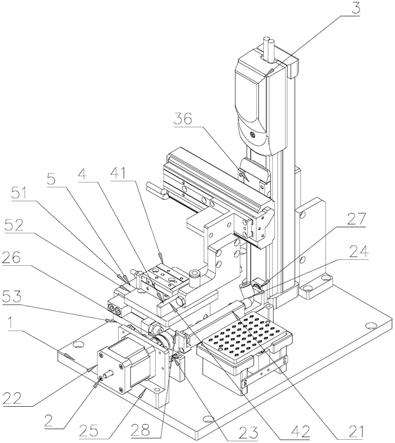
17.图1为本实用新型实施例的第一角度的结构示意图;
18.图2为本实用新型实施例的第二角度的结构示意图;
19.图3为本实用新型的物料与物料料盘的结构示意图;
20.图4为本实用新型为图3圈示的a部分的局部放大图;
21.图5为本实用新型旋转吸板的旋转示意图。
具体实施方式
22.为详细说明本实用新型的技术内容、构造特征、所实现目的及效果,以下结合实施方式并配合附图详予说明。
23.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本实用新型,而不能理解为对本实用新型的限制。
24.请参阅图1、图2及图5,本实用新型实施例提供了一种适用于整盘微小产品翻面的自动化机构,包括底板1,还包括旋转吸板组件2、升降吸板组件3和推料组件4,旋转吸板组件2、升降吸板组件3和推料组件4均设置于底板1上,其中,
25.旋转吸板组件2包括旋转吸板21,旋转吸板21设置于底板1上,升降吸板组件3设置于旋转吸板2上方,推料组件4设置于旋转吸板21一侧。
26.通过将物料放至指定位置,升降吸板组件3移动至物料处,吸取物料至旋转吸板21上方,升降吸板组件3控制物料放置于底板1上,推料组件4将物料推至于旋转吸板21处,旋转吸板21吸附物料,此时升降吸板组件3和推料组件4退回,旋转吸板21旋转90
°
,升降吸板组件3下降吸取物料,放置于指定位置,即完成翻转90
°
的过程,通过吸附配合旋转的方式对产品进行翻面,稳定可靠,避免了物料棱边和尖角会相互划伤物料的表面。
27.进一步地,旋转吸板组件2还包括第一驱动件22、光电开关23与第一吸附头24,第
一驱动件22通过第一安装座25固定于底板1上,第一驱动件22输出轴通过联轴器26与旋转吸板21连接,旋转吸板21上安装有第一吸附头24,光电开关23设置于第一安装座25靠近旋转吸板21的一侧。
28.本实施例中,底板1作为整个结构的安装基准面,第一驱动件22通过第一安装座25固定于底板1上,第一安装座25起到支撑固定第一驱动件22的作用,光电开关23设置于第一安装座25靠近旋转吸板21的一侧,作为第一驱动件22 旋转过程中的原点和正负限位,第一驱动件22输出轴通过联轴器26与旋转吸板21连接,用于将第一驱动件22的动力传递给旋转吸板21,旋转吸板21两侧设置有轴承27,用于为旋转吸板21的旋转提供支撑,其中,轴承27通过轴承安装座28固定于底板1上,旋转吸板21上的第一吸附头24,用于将外界真空源连到旋转吸板21上,对物料进行吸附,需要说明的是,第一驱动件22采用步进电机,用于为旋转吸板21的旋转提供动力,同样的,第一驱动件22同样可以采用气缸等驱动件。
29.进一步地,请参阅图5,旋转吸板21一侧开设有第一真空小孔组。该第一真空小孔组设置于一开口处,用于吸附物料。
30.进一步地,升降吸板组件3包括x轴运动平台31、z轴运动平台32、升降吸板33与第二吸附头34,z轴运动平台32安装于底板1上,x轴运动平台31 安装于z轴运动平台32上,且与z轴运动平台32呈垂直设置,升降吸板33安装于x轴运动平台31上,且升降吸板33设置于旋转吸板21上方,升降吸板 33上设置有第二吸附头34。
31.本实施例中,z轴运动平台32通过固定件35固定于底板1上,x轴运动平台21通过一滑块36连接于z轴运动平台32,且可相对于z轴运动平台32做升降运动,升降吸板33通过一连接板37于x轴运动平台31上,且可相对于x 轴运动平台31做平移运动,且升降吸板33设置于旋转吸板21上方,方便对物料进行吸取、或者在放置物料后,可以及时远离避免在物料翻转时发生碰撞,第二吸附头34用于将外界真空源接到升降吸板33上,需要说明的是,x轴运动平台31与z轴运动平台32连接有诸如步进电机或者气缸等作为驱动件。
32.进一步地,升降吸板33一侧设置有第二真空小孔组。
33.本实施例在升降吸板33的下表面开设有第二真空小孔组,用于搬运物料,同时底面包胶聚氨酯,防止压伤产品,同时也保证能够吸紧产品。
34.进一步地,还包括对接板组件5,对接板组件5设置于旋转吸板21一侧,对接板组件5包括第二驱动件51与对接板52,第二驱动件51通过第二安装座 43安装于底板1上,对接板52与第二驱动件51连接,且设置于旋转吸板21一侧。
35.本实施例中,第二驱动件51用于控制对接板52的伸缩,对接板52起到对接旋转吸板21与升降吸板33的作用,需要说明的是,第二驱动件51采用气缸,同样也可以采用电机等驱动件。
36.进一步地,推料组件4设置于对接板组件5上,推料组件4包括第三驱动件41与推料板42,推料板42与第三驱动件41连接,且推料板42、第三驱动件41安装于对接板52上。
37.本实施例中,推料板42用于当对接板52紧靠旋转吸板21时,将升降吸板 22放在对接板52上面的物料推至与旋转吸板21右上角切口的左侧面贴合;第三驱动件41用于控制推料板42的伸缩,需要说明的是,第三驱动件41采用气缸,同样也可以采用电机等驱动件。
38.进一步地,请参阅图3及图4,还包括物料料盘6与接近开关7,物料料盘 6通过支撑架61固定于底板1上,且设置于旋转吸板21另一侧,接近开关7设置于物料料盘6底部。
39.本实施例中,物料料盘6用于装载物料;接近开关7,用于通过检测物料料盘底部6的钢片来判断物料料盘6的有无;其次,根据图3、4可见物料以阵列的方式排布于物料料盘6中。
40.进一步地,第一真空小孔组、第二真空小孔组的小孔间距与物料料盘6间距等距,可以更好地对物料进行吸附。
41.具体的工作流程如下:起始,整个结构初始化,旋转吸板21运动至0
°
位置。将物料料盘6放入指定位置,接近开关7感应到有信号后,x轴运动平台 31和z轴运动平台32按照预先设定好的点位带动升降吸板33移动至物料料盘 6第一行料的上方,z轴运动平台32下降至升降吸板33接触产品,第二吸附头34所接真空打开,物料被吸附在升降吸板33上。z轴运动平台32上升至安全高度,x轴运动平台31横移至旋转吸板21上方,第二驱动件51将对接板52 推出至与旋转吸板21贴紧,然后z轴运动平台32下降,当物料即将接触到对接板52时停止,第二吸附头34后断开真空,将物料放置在对接板52上,z轴运动平台32提升至安全高度。由于旋转吸板21处于0
°
位置时,第一真空小孔组面向底板1的一面与推料板42上表面齐平,随后第三驱动件41带动推料板 42推出时,物料将被推至与旋转吸板21第一真空小孔组远离推料板42的一面接触;此时,打开第一吸附头24所连真空源,物料将被吸附在旋转吸板21上。接着,第二驱动件51和第三驱动件41缩回,第一驱动件41带动旋转吸板21 逆时针旋转90
°
,然后x轴运动平台31横移,z轴运动平台32下降使升降吸板33与物料接触,此时打开第二吸附头34所连真空源,然后断开第一吸附头 24所连真空源;接着,z轴运动平台32带物料上升至安全高度,x轴运动平台 31横移至物料料盘6第一行上方,z轴运动平台32下降,断开第二吸附头34 所连真空源,物料被重新放入原穴位,z轴运动平台32上升,这样就完成了产品翻转90
°
的整个流程。
42.综上所述,本实用新型提供的一种适用于整盘微小产品翻面的自动化机构,通过吸附配合旋转的方式对物料进行翻面,稳定可靠,避免了物料棱边和尖角会相互划伤物料的表面,同时整行吸附提高了物料的翻面效率。
43.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1