进给装置的制作方法
本发明涉及一种构成直线状的进给轴的进给装置,尤其涉及一种能够测量自身的运动误差的进给装置。
背景技术:
1、以往,例如已知一种工作机械,该工作机械以使保持工具的主轴和安装有工件的工作台在x轴、y轴以及z轴这正交的三轴向上相对移动的方式构成。在该工作机械中,设置有构成x轴方向的进给轴的x轴进给装置、构成y轴方向的进给轴的y轴进给装置、以及构成z轴方向的进给轴的z轴进给装置这三个进给装置。而且,在该结构的工作机械中,其加工精度受到这些进给装置的运动精度的影响,因此需要以通过准确地测量该进给装置的运动误差来将运动误差控制在一定的允许范围内的方式进行适当修正等。
2、近年来,考虑工作机械在三维空间内的运动误差(定位误差)如图5所示,在各进给轴的平移运动的误差、各进给轴的角度误差、以及各进给轴相互之间的垂直度相关的误差相互影响的状态下显现。因此,通过求出这些各误差,能够辨识准确的所述运动误差。
3、以往,作为测量该误差的测量方法,提出了一种使用图6以及图7所示的测量装置的测量方法。作为图6所示的一例的工作机械100由上表面为工件载置面(所谓的工作台)的床体101、呈门形的框体102以及鞍座103构成。框体102以其水平部位于床体101的上方的方式配置,并且框体102的两个垂直部分别与床体101的侧部卡合,整体能够在y轴方向上移动。
4、另外,鞍座103与框体102的水平部卡合,能够沿着该水平部在x轴方向上移动,主轴104以能够在z轴方向上移动且能够以与z轴平行的轴线为中心旋转的方式保持在该鞍座103上。所述x轴、y轴以及z轴是相互正交的基准轴,与该基准轴对应的各进给轴通过x轴进给装置(未图示),y轴进给装置(未图示)以及z轴进给装置(未图示)构成。
5、使用设置在床体101上的激光测长器105以及装配于主轴104的镜子110测量上述各误差。具体而言,首先,分别将激光测长器105设置于规定位置,例如在图6中用实线示出的四处,并且将镜子110装配于主轴104。接着,按照一定间隔分别对所述x轴进给装置、y轴进给装置以及z轴进给装置进行定位控制,由此将所述镜子110定位在按照一定间隔将三维空间内分割成格子状的各格子点上,在各格子点处,从各激光测长器105向镜子110照射激光,并且将该反射光接收到激光测长器105,由此通过各激光测长器105测量与镜子110之间的距离。
6、而且,基于通过上述方法获得的测量数据,按照三边测量法的原理,计算三维空间内的所述各格子点处的镜子110的位置,并通过计算的位置数据以及对该位置数据进行分析,计算上述各误差。
7、此外,所述激光测长器105构成为能够以图7所示的基准球106的中心点为中心,使激光干涉仪107旋回移动,伴随所述镜子110的移动,使激光干涉仪105旋回移动,从而能够自动跟踪该镜子110。
8、然而,这样的结构的激光测长器105非常昂贵,在上述测量中使用四个激光测长器105并不现实。因此,以往使用一个激光测长器105,使该激光测长器105依次移动并设置在四处,在各设置位置中,将所述镜子110定位在所述各格子点上,测量激光测长器105与镜子110之间的距离。
9、然而,在像这样使用一个激光测长器105测量运动误差的情况下,虽然激光测长器105所需的费用减少,但是需要在该激光测长器105的各设置位置处,分别反复执行将所述镜子110定位在所述各格子点的操作,因此存在测量需要较长时间,另外,该操作很复杂而且麻烦的问题。与使用四个激光测长器105的测量相比,在使用一个激光测长器105的测量中,仅计算方面就需要四倍的时间。
10、因此,本技术的申请人在下述专利文献1中,提出了一种虽然使用一个激光测长器,但是能够通过一次操作辨识运动误差的运动误差的辨识方法。
11、现有技术文献
12、专利文献
13、专利文献1:日本特开2019-206043号公报
技术实现思路
1、发明要解决的技术问题
2、然而,近年来,在工作机械领域中,在所述进给装置中采用使用了磁的刻度器或者光学刻度器等高精度的刻度器,高精度地对该进给装置进行控制。
3、因此,如果不需要另外准备上述激光测长器105那样的昂贵的测量器,使用配置于进给装置的现有的所述刻度器,测量该进给装置的运动误差,则不会导致成本过高,另外,测量不需要复杂且麻烦的准备作业,能够高精度地测量进给装置的运动误差,这是很有益的。
4、另外,即使不能够检测工作机械的上述各进给轴的平移运动的误差、各进给轴的角度误差、以及各进给轴相互间的垂直度相关的误差等全部误差,只要能够简单地检测所需最小限度的运动误差,就能够在不大幅度降低该工作机械的运行率的情况下,在适当的时机评价随时间变化的工作机械的运行性能。而且,能够根据获得的评价结果,事先对工作机械进行必要的维护等必要的处理。
5、本发明是鉴于以上情况而完成的,其目的是提供一种能够在短时间内高效地测量自身的运动误差的进给装置。
6、用于解决技术问题的方案
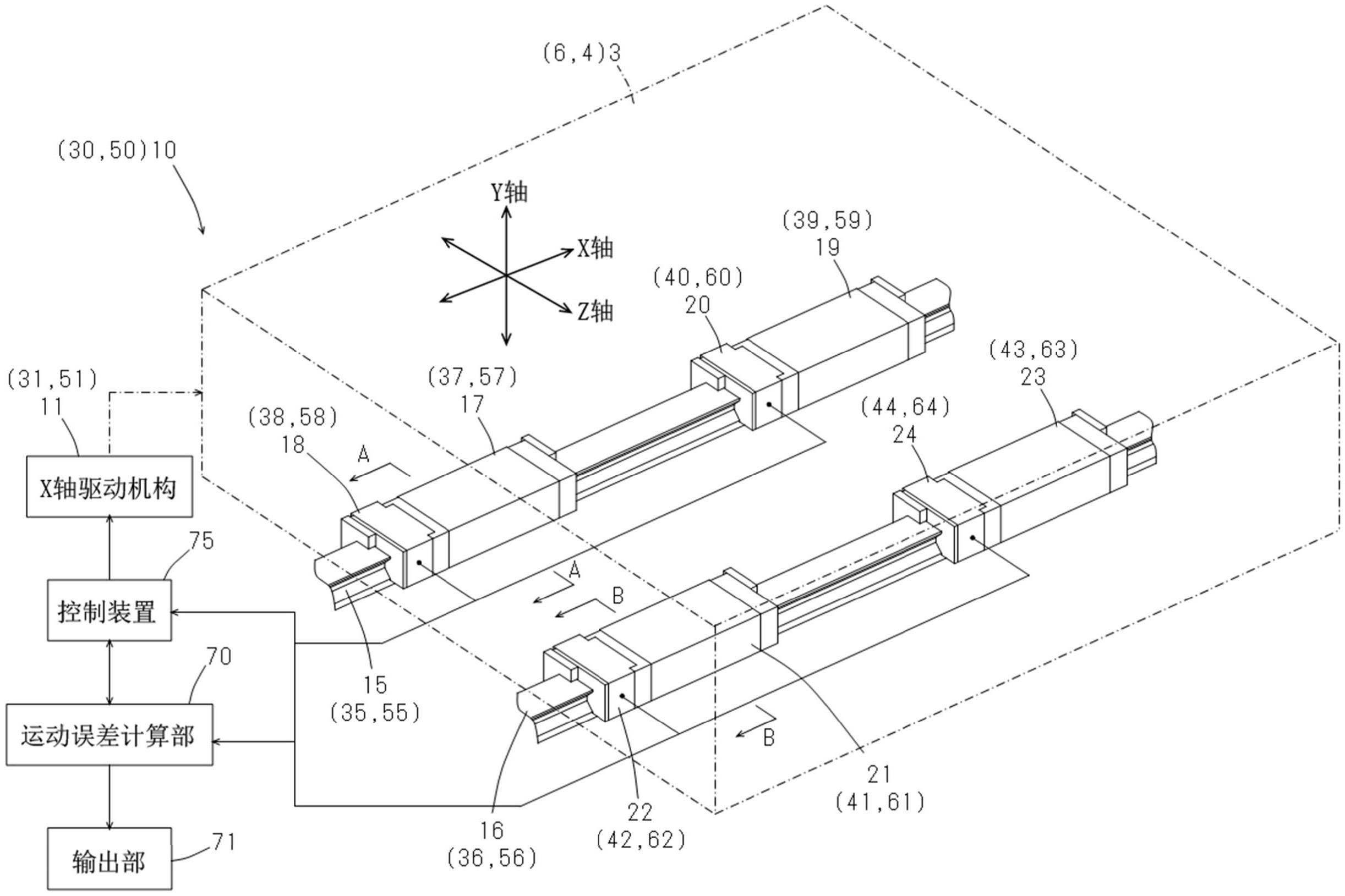
7、用于解决上述技术问题的本发明涉及一种进给装置,具备:
8、两根导轨,其沿着规定的进给方向平行地设置;
9、至少四个滑块,其在所述各导轨上分别设置有至少两个,并沿着所述进给方向移动自如地与所述各导轨卡合,
10、移动台,其安装有所述各滑块,并沿着所述进给方向移动;以及
11、驱动机构,其使所述移动台沿所述进给方向移动,
12、在所述进给装置中设置刻度器、读取头以及运动误差计算部而构成,
13、所述刻度器沿着该所述进给方向配置在至少一个所述导轨上,
14、所述读取头分别设置于滑块,对提供给所述刻度器的信息进行读取,检测所述进给方向上的位置以及与所述进给方向正交的方向上的位置,所述滑块是从所述至少四个滑块中选择的至少两个滑块,且与设置有所述刻度器的导轨卡合,
15、所述运动误差计算部根据通过所述各读取头检测的两方向上的位置信息,计算所述移动台的运动误差。
16、根据该方式(第一方式)的进给装置,通过所述驱动机构驱动所述移动台,从所述导轨以及滑块的卡合关系,该移动台沿所述进给方向移动。而且,在使所述移动台移动预先设定的距离的量时,根据通过设置于所述至少两个滑块的读取头检测的两方向上的位置信息,通过所述运动误差计算部计算所述移动台的运动误差。
17、如此一来,根据该进给装置,不必使用上述激光测长器那样的昂贵的测量器,能够使用配置于进给装置的现有的所述刻度器,测量该进给装置的运动误差,不会导致成本过高,另外,测量不需要复杂且麻烦的准备作业,能够高精度地测量该进给装置的运动误差。
18、另外,由于能够简单地检测进给装置的运动性能,因此能够在不大幅度降低该工作机械的运行率的情况下,在适当的时机评价随时间变化的工作机械的运行性能,能够根据获得的评价结果,事先对工作机械进行必要的维护等必要的处理。
19、此外,在第一方式的进给装置中,通过适当地对设置所述刻度器的导轨以及设置所述读取头的滑块进行设定,所述运动误差计算部除了能够导出所述进给方向上的准直定位误差之外,还能够导出该进给装置的各种运动误差。
20、例如,在所述第一方式的进给装置中,能够采取以下方式(第二方式):将所述刻度器配置于所述两根导轨,并且将所述读取头分别配置于所述四个滑块,
21、所述运动误差计算部以能够根据通过所述四个读取头分别检测的两方向上的位置信息,计算所述移动台的运动误差的方式构成。
22、另外,在该第二方式的进给装置中,能够采取以下方式(第三方式):设置于至少一个所述导轨的两个读取头以检测作为所述进给方向的第一轴向上的位置和在包括所述两根导轨的平面内与所述第一轴正交的第二轴向上的位置的方式构成,设置于另一导轨的两个读取头以检测所述第一轴向上的位置和与所述第一轴以及第二轴正交的第三轴向上的位置的方式构成。
23、或者,在上述第二方式的进给装置中,能够采取以下方式(第四方式):设置于至少一个所述导轨的两个读取头中的一个以检测作为所述进给方向的第一轴向上的位置和在包括所述两根导轨的平面内与所述第一轴正交的第二轴向上的位置的方式构成,并且另一读取头以检测所述第一轴向上的位置和与所述第一轴以及第二轴正交的第三轴向上的位置的方式构成,
24、设置于另一所述导轨的两个读取头以检测所述第一轴向上的位置和所述第三轴向上的位置的方式构成。
25、而且,在上述第三以及第四方式中,能够采取下述方式(第五方式):所述运动误差计算部以计算所述第一轴向上的定位误差(准直定位精度)和从所述第一轴-第二轴平面中的所述第二轴向上的准直误差(准直度)、所述第一轴-第三轴平面中的所述第三轴向上的准直误差(准直度)、绕所述第一轴的角度误差(侧倾)、绕所述第二轴的角度误差(俯仰)以及绕第三轴的角度误差(偏转)中选择的至少一个误差的方式构成。
26、另外,本发明涉及一种工作机械,其具备上述第一方式~第五方式中的任一方式的进给装置。
27、发明效果
28、根据本发明所涉及的进给装置,不必使用上述激光测长器那样的昂贵的测量器,能够使用配置于进给装置的现有的所述刻度器测量该进给装置的运动误差,不会导致成本过高,另外,测量不需要复杂且麻烦的准备作业,能够高精度地测量该进给装置的运动误差。
29、另外,由于能够简单地检测进给装置的运动性能,因此能够在不大幅度降低该工作机械的运行率的情况下,在适当的时机评价随时间变化的工作机械的运行性能,能够根据获得的评价结果,事先对工作机械进行必要的维护等必要的处理。
- 还没有人留言评论。精彩留言会获得点赞!