一种具有伺服推尾装置的试样剪及其控制方法与流程
1.本发明涉及剪切机设备,更具体地说,涉及一种具有伺服推尾装置的试样剪及其控制方法。
背景技术:
2.常规的剪切机在剪切钢板时,是靠输送辊道或者夹送辊将钢板送入剪切机,但在剪切完尾部后,有时会残留一小段钢板,此时残留的一小段钢板完全脱离了输送辊道或夹送辊的输送,这一小段钢板会停留在下剪刃上,如果不及时清除,后面的钢板输送过来会叠加在此一小段钢板上,在剪切会造成叠板剪切的事故。还有一种情况,如果钢板取样位置在试样大板的后端,钢板落在下剪刃刀台上,而钢板的尾部已经离开输送辊道,这时钢板就无法再往前输送了,因为还需要根据试样要求进行定尺,不能直接将钢板推出剪刃刀台,需要根据定尺要求而任意位置能停止,所以需要有一装置和智能控制来实现上述功能。
3.在现有专利申请中,如中国专利201810823531.9公开了一种用于滚切剪的整体式推尾装置和滚切剪,该用于滚切剪的整体式推尾装置包括第一升降推料机构、第二升降推料机构和推板,第一升降推料机构与第二升降推料机构左右对称设置,第一升降推料机构和第二升降推料机构能使推板沿竖直方向移动,第一升降推料机构和第二升降推料机构还能使推板沿水平方向移动。该用于滚切剪的整体式推尾装置可以理想的将不规则的钢板尾料(即不论料尾的长度及形状)一次性完全推离滚切剪,避免发生卡钢等不确定故障的发生。该滚切剪整体的工作效率高,性能稳定、可靠。
4.上述技术是通过2个升降机构的移动将钢板推离剪切机的,结构复杂,但推力大。2个升降机构其中1个升降机构是带动连杆运动的,就是运动的曲线是弧线,并非直线,所以在推尾作业时前面一段距离移动并非紧贴底面的,是有一定间隙的,有些钢板可能推不到,可能骑在钢板的上面过去了,需要反反复复多推几次的。
技术实现要素:
5.针对现有技术中存在的上述缺陷,本发明的目的是提供一种具有伺服推尾装置的试样剪及其控制方法,实现对尾端取样的精确定尺和尾部短尺钢板清除下剪刃刀台面的功能。
6.为实现上述目的,本发明采用如下技术方案:
7.一方面,一种具有伺服推尾装置的试样剪,包括支架、推尾机构和传感器机构;
8.所述支架设于所述试样剪的入口端;
9.所述推尾机构设于所述支架上,并与所述试样剪的plc相连接;
10.所述传感器机构设于所述试样剪的入口端、出口端,用以检测钢板的位置。
11.较佳的,所述推尾机构包括上固定座、连杆结构、下摆动座、支撑座、线轨、推杆、推头、第一伺服电动缸和第二伺服电动缸;
12.所述上固定座设于所述支架上;
13.所述连杆结构的一端连于所述上固定座上,另一端连于所述下摆动座上;
14.所述支撑座设于所述支架的端部,所述第二伺服电动缸设于所述支撑座上,所述第二伺服电动缸的活塞与所述下摆动座连接;
15.所述线轨设于所述下摆动座的下方,所述推杆设于所述线轨上,所述第一伺服电动缸设于所述下摆动座的内部,所述第一伺服电动缸的活塞与所述推杆连接;
16.所述推头设于所述推杆朝所述试样剪方向的端部。
17.较佳的,所述连杆结构包括第一连杆和第二连杆;
18.所述第一连杆、所述第二连杆的上端连于所述上固定座上,下端连于所述下摆动座上。
19.较佳的,所述上固定座、所述连杆结构与所述下摆动座之间,所述第二伺服电动缸的活塞与所述下摆动座之间,所述第一伺服电动缸的活塞与所述推杆之间,所述推头与所述推杆之间均通过销轴连接。
20.较佳的,所述传感器机构包括第一激光传感器和第二激光传感器;
21.所述第一激光传感器设于所述支架上;
22.所述第二激光传感器设于所述试样剪的出口端接料台的定尺机上。
23.所述推头上设有调节螺栓。
24.另一方面,一种试样剪的控制方法,包括以下步骤:
25.1)将所述的试样剪中的所述推尾机构处于等待工作状态;
26.2)准备剪切最后一刀时,输送辊道运转开始计时,并判断所述第二激光传感器是否被触发,若是,则正常剪切,若否,则进入步骤3);
27.3)判断计时是否超时,若是,则进入步骤4),若否,则返回步骤2)
28.4)判断所述第一激光传感器是否为零状态,若是,则进入步骤5),若否,则发出报警,等待人工介入;
29.5)启动所述推尾机构;
30.6)判断钢板是否到达定尺位置,若是,则所述推杆收回并正常剪切,若否,则返回步骤5)。
31.较佳的,所述步骤3)中,计时的公式为剪切定尺长度/输送辊道运转的线速度。
32.较佳的,所述步骤5)中,启动所述推尾机构具体为:
33.所述第二伺服电动缸伸出将所述推杆落下,所述第一伺服电动缸伸出使所述推头推着钢板前行,直至所述第二激光传感器被触发,此时所述第一伺服电动缸收回,到位后发指令至所述试样剪,所述试样剪正常剪切,待完成后所述接料台内的钢板被抓取,此时再发指令至所述推尾机构,所述推尾机构收回并上升回归零位,等待状态。
34.本发明所提供的一种具有伺服推尾装置的试样剪及其控制方法,能对剪切钢板最后落在下剪刃上的一段轻松推落至接料装置上,还能将取样位置靠尾端的试样,智能的推至所需位置定尺定位,大大降低了劳动强度。
附图说明
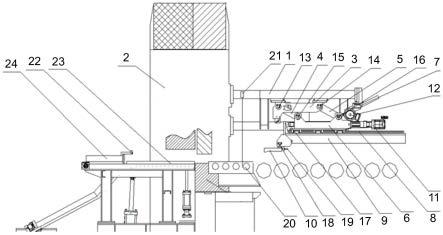
35.图1是本发明试样剪的结构示意图;
36.图2是图1的右视示意图;
37.图3是本发明试样剪中推尾机构下落的示意图;
38.图4是本发明试样剪的控制方法的流程示意图。
具体实施方式
39.为了能更好地理解本发明的上述技术方案,下面结合附图和实施例进一步说明本发明的技术方案。
40.结合图1至图3所示,本发明所提供的一种具有伺服推尾装置的试样剪,包括支架1、推尾机构和传感器机构。
41.支架1设于试样剪的入口端牌坊2上。
42.推尾机构设于支架1上,并与试样剪的plc相连接。
43.推尾机构包括上固定座3、第一连杆4、第二连杆5、下摆动座6、支撑座7、线轨8、推杆9、推头10、第一伺服电动缸11和第二伺服电动缸12。
44.上固定座通过两个销轴13、14设于支架1上。
45.第一连杆4的上端连于销轴13上,下端通过销轴15连于下摆动座6上,第二连杆5的上端连于销轴14上,下端通过销轴16连于下摆动座6上,形成双连杆机构。
46.支撑座7设于支架1的端部,第二伺服电动缸12设于支撑座7上,第二伺服电动缸12的活塞通过销轴16与下摆动座6连接,启动第二伺服电动缸12的伸缩通过双连杆机构能将下摆动座6上下移动。因为采用伺服电动缸,可以在任意高度停留,可以通过相应控制程序随意调节停留高度。
47.线轨8设于下摆动座6的下方,推杆9固定设于线轨8上,第一伺服电动缸11设于下摆动座6的内部,第一伺服电动缸11的活塞通过销轴17与推杆9连接。启动第一伺服电动缸11的伸缩能将推杆9横向移动。因为采用伺服电动缸,可以在任意水平位置停留。
48.推头10通过销轴18设于推杆9朝试样剪方向的端部,推头10因重力原因头部是往下扣的,通过调节螺栓19可以调节推头10的高低位置。当推杆9往前推的时候推头10的位置可以随着输送辊道20面做稍微的上下摆动,保证再推薄板时钢板不会插入推头10的下方。
49.传感器机构设于试样剪的入口端、出口端,用以检测钢板的位置。
50.传感器机构包括第一激光传感器21和第二激光传感器22,第一激光传感器21设于支架1上,第二激光传感器22设于试样剪的出口端接料台23的定尺机24上。
51.结合图4所示,本发明还提供了一种试样剪的控制方法,包括以下步骤:
52.1)将试样剪中的推尾机构处于等待工作状态;
53.2)准备剪切最后一刀时,输送辊道20运转开始计时,并判断第二激光传感器22是否被触发,若是,则正常剪切,若否,则进入步骤3);
54.3)判断计时是否超时,若是,则进入步骤4),若否,则返回步骤2)
55.4)判断第一激光传感器21是否为零状态(即为无钢板),若是,则进入步骤5),若否,则发出报警,等待人工介入;
56.5)启动推尾机构,并判断钢板是否到达定尺位置,若是,则正常剪切,若否,则继续等待。
57.步骤3)中,计时的公式为剪切定尺长度/输送辊道运转的线速度。
58.步骤5)中,启动推尾机构具体为:
59.第二伺服电动缸12伸出将推杆9落下,第一伺服电动缸11伸出使推头10推着钢板前行,直至第二激光传感器22被触发,此时第一伺服电动缸11收回,到位后发指令至试样剪,试样剪正常剪切,待完成后接料台23内的钢板被抓取,此时再发指令至推尾机构,推尾机构收回并上升回归零位,等待状态。
60.实施例
61.推尾机构一直处于等待工作状态,只有试样剪在准备剪切最后一刀的时候才被唤醒。准备剪切最后一刀时,输送辊道20运转开始计时,第二激光传感器22是否被触发(也就是钢板移动是否到达定尺距离位置)?如果未触发,计时是否超时?这个计时的时间的计算公式是(剪切定尺长度/输送辊道运转的线速度),如果超时,第一激光传感器21的状态是否为零状态(即无钢板)?,如果有钢板即发出报警需要人工介入;如果没有钢板,则启动推尾机构工作。第二伺服电动缸12伸出将推杆9落下,第一伺服电动缸11伸出,推着钢板前行,直到第二激光传感器22被触发,即钢板到达定尺位置,这时第一伺服电动缸11收回,收回到位发指令给试样剪,试样剪正常剪切,剪切完成,接料台23内的钢板被抓取,这时发指令给推尾机构,第一伺服电动缸11伸出,全行程将尾部废料推至接料台23上,推尾机构收回并上升回归零位,等待状态。
62.如果准备剪切最后一刀时,输送辊道运转开始计时,第二激光传感器22是否被触发(也就是钢板移动是否到达定尺距离位置)?如果触发了,即正常剪切,剪切完成接料台23内的钢板被抓取,这时发指令给推尾机构,第一伺服电动缸11伸出,全行程将尾部废料推至接料台23上,推尾机构收回并上升回归零位,等待状态。
63.本技术领域中的普通技术人员应当认识到,以上的实施例仅是用来说明本发明,而并非用作为对本发明的限定,只要在本发明的实质精神范围内,对以上所述实施例的变化、变型都将落在本发明的权利要求书范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1