光伏电池串焊的焊带定位装置的制作方法
1.本发明涉及定位系统技术领域,特别涉及一种光伏电池串焊的焊带定位装置。
背景技术:
2.串焊机技术发展迅速,在功能和产能上也已取得很大突破,在串焊机自动完成电池片的串焊过程中,除了焊接工艺研究开发以外,焊带与电池的主栅线和焊点的定位对准,也一直是持续研发改进和提升的发展过程中,随着光伏的平价及降本的需求,焊带变窄变细,电池片的主栅变细,焊接点变化都可以带来可观的降本空间,但是对串焊机的自动对准会进一步提高要求。
3.在现有串焊机上,电池片正面焊带与电池片之间的位置是通过以下方式确定的,拉剪焊带机构把焊带按一定长度拉直和相关动作后,送到与电池片结合的位置,其中正面焊带是直接放到电池片正面后,通过一个压具把焊带压住。
4.为了不影响焊接一个电池片上只能放一个压具放在中间位置,只压到一个点的位置,这并不能很好的纠正由于焊带放置偏差造成的影响,尤其是电池片的两端。
5.因此,如何提高焊带的定位精度,是本领域技术人员亟待解决的技术问题。
技术实现要素:
6.本发明的目的是提供一种光伏电池串焊的焊带定位装置,以提高焊带的定位精度。
7.为实现上述目的,本发明提供一种光伏电池串焊的焊带定位装置,包括:
8.用于焊带位置拍摄的视觉定位装置;
9.焊带锁紧装置,所述焊带锁紧装置用于锁紧焊带;
10.及用于调节所述焊带锁紧装置上焊带位置的焊带调节装置,所述焊带调节装置与所述视觉定位装置连接,且根据所述视觉定位装置信息调整焊带位置。
11.优选地,所述焊带锁紧装置包括焊带拉钳及用于焊带导出和剪断的焊带导出组件,所述焊带导出组件包括用于容置焊带的焊带导槽、用于剪断焊带的焊带剪及用于夹紧焊带的焊带夹钳。
12.优选地,所述焊带调节装置包括用于带动所述焊带夹钳运动的夹钳调节装置及用于带动所述焊带拉钳运动拉钳调节装置。
13.优选地,所述夹钳调节装置包括第一直线电机和设置在所述第一直线电机的焊带夹钳直线电机x方向动子上的多个第三直线电机,所述第一直线电机为一个,所述第三直线电机的夹钳动子与焊带夹钳一一对应;
14.所述拉钳调节装置包括第二直线电机和设置在所述第二直线电机的焊带拉钳直线电机x方向动子上的第四直线电机,所述第二直线电机为一个,所述第四直线电机的拉钳动子一一对应。
15.优选地,所述夹钳调节装置与所述焊带夹钳一一对应或所述夹钳调节装置带动所
有所述焊带夹钳运动。
16.优选地,拉钳调节装置与所述焊带拉钳一一对应或所述拉钳调节装置带动所有所述焊带拉钳运动。
17.优选地,所述焊带调节装置用于带动焊带水平xy方向及旋转运动。
18.优选地,还包括用于放置光伏电池片的电池载台及用于带动所述电池载台运动的电池载台调整机构,所述焊带拉钳安装在所述电池载台上。
19.优选地,所述电池载台调整机构用于带动所述电池载台水平xy方向和旋转运动。
20.优选地,所述拉钳调节装置用于带动所述焊带拉钳水平xy方向或旋转运动和/或所述夹钳调节装置用于带动所述焊带夹钳水平xy方向或旋转运动。
21.在上述技术方案中,本发明提供的光伏电池串焊的焊带定位装置包括视觉定位装置、焊带锁紧装置和用于调节焊带锁紧装置上焊带位置的焊带调节装置,视觉定位装置用于焊带位置拍摄,焊带锁紧装置用于锁紧焊带,焊带调节装置与视觉定位装置连接,且根据视觉定位装置信息调整焊带位置。
22.通过上述描述可知,在本技术提供的光伏电池串焊的焊带定位装置中,由于视觉定位装置用于焊带位置拍摄,通过焊带调节装置与视觉定位装置连接,且根据视觉定位装置信息调整焊带位置,进而根据需要调整焊带位置,进而提高了焊带的定位精度。
附图说明
23.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
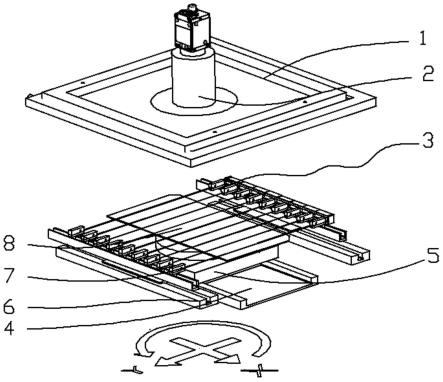
24.图1为本发明实施例所提供的焊带定位装置的结构示意图;
25.图2为本发明实施例所提供的夹钳机构的结构示意图;
26.图3为图2所述夹钳机构的a部放大图;
27.图4为本发明实施例所提供的拉钳机构的结构示意图;
28.图5为图4所述拉钳机构的b部放大图。
29.其中图1-5中:1、光源;2、相机;3、夹钳机构;3-1、焊带导槽;3-2、焊带剪;3-3、焊带夹钳;3-4、夹钳动子;3-5、焊带夹钳直线电机x方向直线电机;3-6、焊带夹钳直线电机x方向动子;3-7、第一直线电机;3-8、夹钳调节装置;4、电池载台调整机构;5、电池载台;6、拉钳机构;6-1、焊带拉钳;6-2、拉钳动子;6-3、拉钳调节装置;6-4、拉钳定子;6-5、焊带拉钳直线电机x方向动子;6-6、第二直线电机;7、焊带;8、光伏电池片。
具体实施方式
30.本发明的核心是提供一种光伏电池串焊的焊带定位装置,以提高焊带的定位精度。
31.为了使本领域的技术人员更好地理解本发明的技术方案,下面结合附图和实施方式对本发明作进一步的详细说明。
32.请参考图1至图5。
33.在一种具体实施方式中,本发明具体实施例提供的光伏电池串焊的焊带定位装置包括视觉定位装置、焊带锁紧装置和用于调节焊带锁紧装置上焊带7位置的焊带调节装置。
34.视觉定位装置用于焊带7位置拍摄。具体的,视觉定位装置包括相机系统和光源1,其中相机系统设有镜头,相机系统的相机2为工业用2d灰度相机,配合对应的镜头。光源1为白光led方形光源。相机2和光源1结合相应的视觉软件即可搭建起视觉检测引导系统。
35.焊带锁紧装置用于锁紧焊带7,焊带调节装置与视觉定位装置连接,且根据视觉定位装置信息调整焊带位置。
36.焊带锁紧装置为多个,且呈一排设置,具体的,焊带锁紧装置至少为两个。焊带锁紧装置为n个,通常n的范围为2至32,按实际工程需要可设置为5,9,12等。具体的,焊带拉钳6-1分别为c1、c2
…
cn,焊带夹钳3-3分别为b1、b2
…
bn,用于卡紧焊带,焊带7分别为l1、l2
…
ln。
37.在一种具体实施方式中,焊带锁紧装置包括焊带拉钳6-1及用于焊带导出和剪断的焊带导出组件,焊带导出组件包括用于容置焊带7的焊带导槽3、用于剪断焊带7的焊带剪5及用于夹紧焊带7的焊带夹钳3-3。具体的,焊带拉钳6-1和焊带导出组件位于光伏电池片8的相对两侧。
38.为了提高定位精确度,优选,焊带调节装置用于带动焊带7进行水平xy方向运动,具体的,焊带调节包括沿y方向调节装置及x方向调节装置,y方向调节装置带动x方向调节装置沿y方向运动,焊带安装在x方向调节装置的x方向调节端,进而实现xy方向调节。
39.具体的水平xy方向运动,包括水平xy方向的x方向运动及垂直于x方向的y方向运动。焊带调节装置也可以用于带动焊带7进行旋转运动。具体的,焊带调节装置水平调节时通过水平伸缩调节装置带动运动,旋转装置安装在水平伸缩调节装置的伸缩端,焊带夹钳3-3安装在旋转装置的旋转端上。
40.具体的,焊带调节装置包括用于带动焊带夹钳3-3运动的夹钳调节装置3-8及用于带动焊带拉钳6-1运动拉钳调节装置6-3。夹钳调节装置3-8与焊带夹钳3-3一一对应或夹钳调节装置3-8带动所有焊带夹钳3-3运动。
41.拉钳调节装置6-3与焊带拉钳6-1一一对应或拉钳调节装置6-3带动所有焊带拉钳6-1运动。
42.夹钳调节装置3-8和拉钳调节装置6-3可以均为直线电机。具体的,夹钳调节装置3-8为夹钳直线电机,拉钳调节装置6-3为拉钳直线电机。焊带拉钳6-1作用夹紧拉出焊带,同时固定在焊带拉钳机构对焊带位置进行微调整。焊带夹钳3-3作用夹紧焊带,同时固定在焊带夹钳机构对焊带位置进行微调整,具体的,夹钳直线电机包括夹钳直线电机定子和夹钳直线电机动子,拉钳直线电机包括拉钳直线电机定子和拉钳直线电机动子。焊带夹钳3-3通过螺钉固定在夹钳直线电机动子,焊带拉钳6-1通过螺钉固定在拉钳直线电机动子上,由对应的每个直线电机的直线电机动子带动相对应焊带夹钳3-3和焊带拉钳6-1左右动作。
43.具体的,可以同一排焊带拉钳6-1共用拉钳直线电机,拉钳直线电机的包括拉钳直线电机定子及与拉钳直线电机定子连接的多个拉钳直线电机动子,拉钳直线电机动子与焊带拉钳6-1一一对应。同一排焊带夹钳3-3共用同一个夹钳直线电机,具体的,夹钳直线电机包括夹钳直线电机定子和与夹钳直线电机定子连接的多个夹钳直线电机动子,夹钳直线电机动子与焊带夹钳3-3一一对应。在具体工作时,每个焊带拉钳6-1和焊带夹钳3-3只能一方
向运动,即图示的x方向,如果要调整单根焊带的角度,即旋转运动,则每根焊带的拉钳直线电机动子和夹钳直线电机动子分别往不同的x方向即可实现,具体的,拉钳直线电机动子和夹钳直线电机动子相向运动或背向运动。
44.具体的,拉钳直线电机与焊带拉钳6-1一一对应或拉钳直线电机带动所有焊带拉钳6-1运动。也可以,拉钳直线电机与焊带导出组件一一对应或拉钳直线电机带动所有焊带夹钳3-3运动。焊带调节装置由相应的伺服控制设备驱动,其可实现整体n条焊带7的x、y、t方向上的微动同步调节,也可进行单条焊带7的x、y、t方向上的微动单个调节。
45.优选的,拉钳调节装置6-3用于带动焊带拉钳6-1水平xy方向或旋转运动,夹钳调节装置3-8用于带动焊带夹钳3-3水平xy方向或旋转运动。具体的,夹钳调节装置3-8带动焊带拉钳6-1和拉钳调节装置6-3带动焊带夹钳3-3通过在水平相向或反向运动实现旋转运动。
46.也可以,夹钳调节装置3-8包括第一直线电机3-7和设置在第一直线电机3-7的焊带夹钳直线电机x方向动子3-6上的多个第三直线电机,第一直线电机为一个,第三直线电机的夹钳动子3-4与焊带夹钳3-3一一对应,第三直线电机为焊带夹钳直线电机x方向直线电机3-5,第一直线电机3-7上的焊带夹钳直线电机x方向直线电机定子上设有一个焊带夹钳直线电机x方向直线电机动子3-6,焊带夹钳直线电机x方向动子3-6上设有第三直线电机的夹钳定子。第一直线电机3-7实现同一排焊带夹钳3-3同步移动,第三直线电机实现单个焊带夹钳3-3运动。
47.拉钳调节装置6-3包括第二直线电机6-6和设置在第二直线电机6-6的焊带拉钳直线电机x方向动子6-5上的第四直线电机,第二直线电机6-6为一个,第四直线电机的拉钳动子6-2与焊带拉钳6-1一一对应,第二直线电机6-6上的焊带拉钳直线电机x方向定子上设有一个焊带拉钳直线电机x方向动子6-5。焊带拉钳直线电机x方向动子6-5上设有第四直线电机的拉钳定子6-4,第二直线电机6-6实现同一排焊带拉钳6-1同步移动,第四直线电机实现单个焊带拉钳6-1运动。
48.在一种具体实施方式中,该焊带定位装置还包括用于放置光伏电池片8的电池载台5及用于带动电池载台5运动的电池载台调整机构,焊带拉钳6-1安装在电池载台5上。具体的,电池载台调整机构通过对应伺服控制设备驱动。优选,电池载台调整机构用于带动电池载台5水平xy方向和旋转运动。
49.具体的,焊带调节装置可以安装在电池载台5上。
50.焊带调节装置水平布置于电池载台5的上方,视觉定位装置水平放置在焊带调节装置的上方,视觉定位装置与焊带调节装置完成手眼系统标定,同时相机2完成视觉定位装置内外参数系统标定,即得出相机2坐标系在焊带调节装置坐标系下的位置关系和物体在相机2坐标系下的位置关系。相机系统根据二维坐标系下光伏电池片8相应的焊点和主栅线的x、y、t数值,并根据手眼标定关系将其转换到焊带调节装置坐标系下的x、y、z数值,根据焊带调节装置的拉焊条拉伸方向在拉伸放置机构坐标系下的n个x*、y*、t*数值,并与x、y、t数据进行差值运算,得出焊条与电池片焊接方向上位置偏移量,同时相机系统把偏移量输入焊带调节装置,焊带调节装置控制焊带调节装置进行整体或者单一焊带7微动调节,使焊带7和电池片焊点、主栅线实现对齐。在使用时,相机2获取的检测图像是正对光伏电池片8平面拍摄获得的,通过基于2d视觉识别、位置估算定位等算法,判断出相机2二维坐标系下
描述的光伏电池片8相应的焊点和主栅线的x、y、t数值。具体的,在具体调节时,x和x可以代表水平x方向数值,y和y可以代表水平y竖直,t和t可以代表水平旋转方向竖直。
51.优选,上述旋转运动优选为水平xy方向旋转运动,水平运动为带动水平平移运动。例如,焊带调节装置带动焊带水平平移运动和水平旋转运动。电池载台调整机构用于带动电池载台5水平平移运动和水平旋转运动。拉钳调节装置6-3用于带动所述焊带拉钳6-1水平平移运动和水平旋转运动。夹钳调节装置3-8用于带动所述焊带夹钳3-3水平平移运动和水平旋转运动。
52.在一种具体实施方式中,该焊带定位装置还包括用于放置光伏电池片8的电池载台5及用于带动电池载台5运动的电池载台调整机构,焊带拉钳6-1安装在电池载台5上,视觉定位装置根据手眼标定关系调整电池载台5位置,可以实现与焊带调节装置的联合位置补偿,使整个微动归正机构快速进行焊条与电池片焊点、主栅线的快速精准对齐。
53.焊带7通过焊带剪5剪断后,两端焊带夹钳3-3和焊带拉钳6-1将焊带7拉紧拉直,如出现某根或多根焊带7与主栅不在一条直线上,焊带拉钳6-1直线电机和焊带夹钳3-3直线电机带动对应焊带7的动子进行微调正,将这根焊带7与所对应主栅线调整到一条直线上。
54.在本技术具体实施例所提供的光伏电池串焊的焊带定位装置中,由于视觉定位装置用于焊带7位置拍摄,通过焊带调节装置与视觉定位装置连接,且根据视觉定位装置信息调整焊带7位置,进而根据需要调整焊带7位置,进而提高了焊带7的定位精度。
55.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
56.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1