压力机械的驱动装置的制作方法
1.本发明涉及压力机械(压力机)的驱动装置(机构)。
背景技术:
2.以往,作为压力机械的驱动装置(机构),例如存在如图3的(a)、图3的(b)所示的驱动装置。
3.该压力机械的驱动装置(机构)30被称作所谓机械式压力机,如图3的(a)、图3的(b)所示,构成为将作为驱动源的主马达1的旋转输出经由v-带2而向飞轮3传递从而进行旋转驱动。此外,标号31是在左右方向上延伸的框架(压力机械的横梁(英文:crown)),标号32是在重力方向上延伸的框架(压力机械的立柱)。
4.在飞轮3经由离合器机构4而旋转连接有驱动轴5,构成为能够利用离合器机构4将飞轮3与驱动轴5的旋转连接切换为连接状态/切断状态。此外,在驱动轴5的与飞轮3相反的一侧配设有用于使驱动轴5的旋转停止的制动器装置22。
5.被传递了飞轮3的旋转动力的驱动轴5从离合器机构4侧的基端侧朝向相反侧的顶端侧延伸,在顶端侧与驱动轴5同轴地且大致一体地设置有前(前侧)用驱动齿轮6,并且在基端侧与驱动轴5同轴地且大致一体地设置有后(后侧)用驱动齿轮7。此外,驱动轴5相对于横梁31、立柱32以旋转自如的方式被支承。
6.在前用驱动齿轮6的外周齿轮啮合并旋转连接(或旋转连结)有左前用中间齿轮8a。另外,在该左前用中间齿轮8a啮合并旋转连接有右前用中间齿轮8b。此外,在此说明的齿轮是外周齿轮,并且相对于横梁31、立柱32以旋转自如的方式被支承。
7.在左前用中间齿轮8a同轴地且大致一体地设置有左前用主小齿轮9a,同样,在右前用中间齿轮8b同轴地且大致一体地设置有右前用主小齿轮9b。
8.并且,在左前用主小齿轮9a啮合有左前用主齿轮10a,在右前用主小齿轮9b啮合有右前用主齿轮10b。
9.在左前用主齿轮10a、右前用主齿轮10b大致一体地设置有从其旋转轴z1、z2偏置(偏心)的曲柄销14a、14b,在该曲柄销14a、14b以旋转自如的方式支承有左前用连杆15a、右前用连杆15b的基端侧。
10.并且,经由左前用连杆15a、右前用连杆15b的顶端侧的支承部19a、19b而支承有滑动件21。此外,滑动件21相对于横梁31、立柱32以上下移动自如的方式被支承。
11.同样,在后用驱动齿轮7啮合并旋转连接有左后用中间齿轮11a的外周齿轮。另外,在该左后用中间齿轮11a的外周齿轮啮合并旋转连接有右后用中间齿轮11b。
12.在左后用中间齿轮11a同轴地且大致一体地设置有左后用主小齿轮12a,同样,在右后用中间齿轮11b同轴地且大致一体地设置有右后用主小齿轮12b。
13.在左后用主齿轮13a、右后用主齿轮13b大致一体地设置有从其旋转轴z1、z2偏置(偏心)的曲柄销14a、14b,在该曲柄销14a、14b以旋转自如的方式支承有左后用连杆16a、右后用连杆16b的基端侧。
14.并且,经由左后用连杆16a、右后用连杆16b的顶端侧的支承部20a、20b而支承有滑动件21。
15.在这样的结构中,构成为:若使主马达1进行旋转驱动,则其旋转驱动力经由v-带2、飞轮3、离合器机构4、驱动轴5、各齿轮而向各主齿轮10a、10b、13a、13b传递,其旋转力经由曲柄销14a、14b而被变换为滑动件21的上下移动,由设置于滑动件21的下表面的模具等进行冲压加工。
16.近年来,采用了能够实现自由的滑动件的动作的电动伺服压力机,但在电动伺服压力机的情况下,从能够通过软件而以比较高的自由度控制滑动件动作、冲压压力(加压压力)、电磁制动力等各种运转状态这一优点和促进装置成本的降低、小型化等的等观点来看,一般采用以下结构:将以往的机械式压力机所具备的飞轮、离合器
·
制动器装置清除,伺服马达和曲柄机构始终设为旋转连结状态而无法将驱动源(伺服马达)与运转部(滑动件)的旋转连结物理地(或机械地)切断。
17.即,省略图3的(a)、(b)的飞轮3、离合器机构4,直接地将驱动轴5利用电动伺服马达来驱动旋转,但此时,在图3的(a)的左侧的驱动路径中,存在与驱动轴5一体的前用驱动齿轮6(或后用驱动齿轮7)与左前用中间齿轮8a(或左后用中间齿轮11a)啮合的点p1、及左前用主小齿轮9a(或左后用主小齿轮12a)与左前用主齿轮10a(或左后用主齿轮13a)啮合的点p2,啮合点合计存在2个。
18.另一方面,在图3的(a)的右侧的驱动路径中,存在与驱动轴5一体的前用驱动齿轮6(或后用驱动齿轮7)与左前用中间齿轮8a(或左后用中间齿轮11a)啮合的点q1(=p1)、左前用中间齿轮8a(或左后用中间齿轮11a)与右前用中间齿轮8b(或右后用中间齿轮11b)啮合的点q2、及右前用主小齿轮9b(或右后用主小齿轮12b)与右前用主齿轮10b(或右后用主齿轮13b)啮合的点q3,啮合点合计存在3个。
19.这些啮合点是齿轮彼此啮合的点,因此是会受到齿轮的间隙的影响而招致各齿轮的向旋转方向的松动(游隙运动,日文:遊動)的点,若其数量在左右不同,则在左右间相位错开,在要利用伺服马达来进行细致的控制的情况下可能会带来障碍。
技术实现要素:
20.因而,本发明是至少具备左右一对的电动伺服马达作为驱动源的电动伺服压力机的驱动装置,其特征在于,构成为包括:
21.左用驱动轴,由左右一对的左侧的电动伺服马达直接地被驱动旋转;
22.右用驱动轴,由左右一对的右侧的电动伺服马达直接地被驱动旋转;
23.同一规格的左前用驱动齿轮及左后用驱动齿轮,同轴地且一体地设置于所述左用驱动轴;
24.同一规格的右前用驱动齿轮及右后用驱动齿轮,同轴地且一体地设置于所述右用驱动轴;
25.同一规格的左前用中间齿轮及左后用中间齿轮,分别啮合于所述左前用驱动齿轮及左后用驱动齿轮;
26.同一规格的右前用中间齿轮及右后用中间齿轮,分别啮合于所述右前用驱动齿轮及右后用驱动齿轮;
27.同一规格的左前用主小齿轮及左后用主小齿轮,分别同轴地且一体地设置于所述左前用中间齿轮及左后用中间齿轮;
28.同一规格的右前用主小齿轮及右后用主小齿轮,分别同轴地且一体地设置于所述右前用中间齿轮及右后用中间齿轮;
29.同一规格的左前用主齿轮及左后用主齿轮,分别啮合于所述左前用主小齿轮及左后用主小齿轮,并且相互设置于同轴上;
30.同一规格的右前用主齿轮及右后用主齿轮,分别啮合于所述右前用主小齿轮及右后用主小齿轮,并且相互设置于同轴上;
31.左用曲柄销,在从所述左前用主齿轮及左后用主齿轮的共用的旋转中心轴预定地偏置的位置与所述左前用主齿轮及左后用主齿轮一体地设置;
32.右用曲柄销,在从所述右前用主齿轮及右后用主齿轮的共用的旋转中心轴预定地偏置的位置与所述右前用主齿轮及右后用主齿轮一体地设置;
33.左前用连杆及左后用连杆,基端侧以旋转自如的方式被支承于所述左用曲柄销;
34.右前用连杆及右后用连杆,基端侧以旋转自如的方式被支承于所述右用曲柄销;及
35.滑动件,被支承于所述左前用连杆、左后用连杆及所述右前用连杆、右后用连杆各自的顶端侧,构成为能够上下移动。
36.另外,本发明是至少具备左右一对的电动伺服马达作为驱动源的电动伺服压力机的驱动装置,其特征在于,构成为包括:
37.左用驱动轴,由左右一对的左侧的电动伺服马达经由齿轮而被驱动旋转;
38.右用驱动轴,由左右一对的右侧的电动伺服马达经由齿轮而被驱动旋转;
39.同一规格的左前用主小齿轮及左后用主小齿轮,同轴地且一体地设置于所述左用驱动轴;
40.同一规格的右前用主小齿轮及右后用主小齿轮,同轴地且一体地设置于所述右用驱动轴;
41.同一规格的左前用主齿轮及左后用主齿轮,分别啮合于所述左前用主小齿轮及左后用主小齿轮,并且相互设置于同轴上;
42.同一规格的右前用主齿轮及右后用主齿轮,分别啮合于所述右前用主小齿轮及右后用主小齿轮,并且相互设置于同轴上;
43.左用曲柄销,在从所述左前用主齿轮及左后用主齿轮的共用的旋转中心轴预定地偏置的位置与所述左前用主齿轮及左后用主齿轮一体地设置;
44.右用曲柄销,在从所述右前用主齿轮及右后用主齿轮的共用的旋转中心轴预定地偏置的位置与所述右前用主齿轮及右后用主齿轮一体地设置;
45.左前用连杆及左后用连杆,基端侧以旋转自如的方式被支承于所述左用曲柄销;
46.右前用连杆及右后用连杆,基端侧以旋转自如的方式被支承于所述右用曲柄销;及
47.滑动件,被支承于所述左前用连杆、左后用连杆及所述右前用连杆、右后用连杆各自的顶端侧,构成为能够上下移动。
48.在本发明中,能够特征在于,构成为包括啮合于所述左前用主齿轮的左前用惰轮
和啮合于该左前用惰轮并且啮合于所述右前用主齿轮的右前用惰轮。
49.在本发明中,能够特征在于,在由所述左前用连杆及左后用连杆侧和所述右前用连杆及右后用连杆侧支承的滑动件的左右方向上设为不同的冲压能力产生点位置,以将该不同的冲压能力产生点位置处的传递转矩在电动伺服马达的能力的范围内在左右方向上分开的方式控制各电动伺服马达的驱动。
50.在本发明中,能够特征在于,设置有作用于所述电动伺服马达的输出旋转轴而施加制动的摩擦式制动器装置,使该摩擦式制动器装置作为驻车制动器及紧急停止用制动器发挥功能,
51.并且,在使该摩擦式制动器装置作为紧急停止用制动器发挥功能的情况下,控制装置以在正常的情况下在通过旋转停止控制的执行而电动伺服马达旋转停止的预定停止时刻或其附近、摩擦要素实际开始接触而制动开始的方式控制该摩擦式制动器装置。
附图说明
52.图1中,(a)是将本发明的实施方式的实施例1的电动伺服压力机的驱动装置(机构)的与本发明相关联的部分抽出而示出的主视图,(b)是(a)的驱动装置(机构)涉及的部分的俯视图。
53.图2中,(a)是将本发明的实施方式的实施例2的电动伺服压力机的驱动装置(机构)的与本发明相关联的部分抽出而示出的主视图,(b)是(a)的驱动装置(机构)涉及的部分的俯视图。
54.图3中,(a)是以往的机械式压力机的驱动装置(机构)的主视图,(b)是(a)的驱动装置(机构)涉及的部分的俯视图。
具体实施方式
55.以下,一边参照附图一边对示出本发明的电动伺服压力机的驱动装置(机构)的一例的实施方式进行说明。此外,本发明不由以下说明的实施方式限定。
56.本发明的目的之一在于,提供在具备电动伺服马达的电动伺服压力机中能够抑制驱动装置内的相位差而实现细致的冲压控制进而能够生产高品质的冲压产品的电动伺服压力机的驱动装置。
57.图1的(a)是本实施方式的实施例1的电动伺服压力机的驱动装置(机构)100的主视图,以将与本发明相关联的部分抽出且省略其他部分的方式示出。图1的(b)是图1的(a)的驱动装置(机构)涉及的部分的俯视图。
58.此外,在此,左是指比图1的(a)、(b)所示的中心线cl1靠左侧,右是指比该中心线cl1靠右侧。另外,前是指比图1的(b)所示的中心线cl2在图中靠下侧,后是指比该中心线cl2在图中靠上侧。
59.如图1的(a)、(b)所示,作为驱动源的伺服马达101a、102a构成为分别连结于共用的左用驱动轴103a的一端(前侧)、另一端(后侧)且进行旋转驱动。右侧也是同样,作为驱动源的伺服马达101b、102b构成为分别连结于共用的右用驱动轴103b的一端(前侧)、另一端(后侧)且进行旋转驱动。不过,也能够设为使齿轮介于伺服马达101a(102a)与左用驱动轴103a之间的结构。同样,也能够设为使齿轮介于伺服马达101b(102b)与右用驱动轴103b之
间的结构。
60.伺服马达101a、101b、102a、102b的驱动基于来自作为控制装置的控制单元150的驱动控制信号而被控制。
61.此外,标号131是在左右方向上延伸的框架(压力机的横梁),标号132是在重力方向上延伸的框架(压力机的立柱),也包括后述的伺服马达,实施例1的各伺服马达固定地安装于横梁131。另外,也包括后述的驱动轴,实施例1的各驱动轴相对于横梁131、立柱132经由轴承等而以旋转自如的方式被支承。
62.在左用驱动轴103a的前侧与左用驱动轴103a同轴地且大致一体地设置有左前用驱动齿轮104a,并且在左用驱动轴103a的后侧与左用驱动轴103a同轴地且大致一体地设置有左后用驱动齿轮108a。此外,也包括后述的齿轮,实施例1的各齿轮例示了外周齿轮,并且相对于横梁131、立柱132经由轴承等而以旋转自如的方式被支承。
63.本实施例的电动伺服压力机的驱动装置100除了一部分的非对称的部分之外,基本上是左右对称、前
·
后对称(前后对称)的构造,因此,除了非对称的部分之外,处于对称的位置的齿轮、轴等构成要素至少能够相互设为同一规格。
64.在左前用驱动齿轮104a啮合并旋转连接(旋转连结)有左前用中间齿轮105a。同样,在左后用驱动齿轮108a啮合并旋转连接(旋转连结)有左后用中间齿轮109a。
65.在左前用中间齿轮105a同轴地且大致一体地设置有左前用主小齿轮106a。同样,在左后用中间齿轮109a同轴地且大致一体地设置有左后用主小齿轮110a。
66.并且,在左前用主小齿轮106a啮合有左前用主齿轮107a。同样,在左后用主小齿轮110a啮合有左后用主齿轮111a。
67.在左前用主齿轮107a、左后用主齿轮111a大致一体地设置有从其共用的旋转轴x1偏置(偏心)的曲柄销112a,在该曲柄销112a以旋转自如的方式支承有左前用连杆113a、左后用连杆114a的基端侧。
68.经由左前用连杆113a、左后用连杆114a的顶端侧的支承部115a、116a而支承有滑动件117的左侧的前侧和后侧。
69.同样,在右前用驱动齿轮104b啮合并旋转连接(旋转连结)有右前用中间齿轮105b。另外,在右后用驱动齿轮108b啮合并旋转连接(旋转连结)有右后用中间齿轮109b。
70.在右前用中间齿轮105b同轴地且大致一体地设置有右前用主小齿轮106b。同样,在右后用中间齿轮109b同轴地且大致一体地设置有右后用主小齿轮110b。
71.并且,在右前用主小齿轮106b啮合有右前用主齿轮107b。同样,在右后用主小齿轮110b啮合有右后用主齿轮111b。
72.在右前用主齿轮107b、右后用主齿轮111b大致一体地设置有从其共用的旋转轴x2偏置(偏心)的曲柄销112b,在该曲柄销112b以旋转自如的方式支承有右前用连杆113b、右后用连杆114b的基端侧。
73.经由右前用连杆113b、右后用连杆114b的顶端侧的支承部115b、116b而支承有滑动件117的右侧的前侧和后侧。
74.此外,滑动件117相对于横梁131、立柱132以上下移动自如的方式被支承。
75.在这样的结构中,构成为:若使各伺服马达101a、102a(101b、102b)基于来自控制单元150的驱动信号进行旋转驱动,则旋转力向与左用驱动轴103a(右用驱动轴103b)一体
的左前用驱动齿轮104a、左后用驱动齿轮108a(右前用驱动齿轮104b、右后用驱动齿轮108b)、左前用中间齿轮105a、左后用中间齿轮109a(右前用中间齿轮105b、右后用中间齿轮109b)、左前用主小齿轮106a、左后用主小齿轮110a(右前用主小齿轮106b、右后用主小齿轮110b)、左前用主齿轮107a、左后用主齿轮111a(右前用主齿轮107b、右后用主齿轮111b)按该顺序依次传递,该旋转力经由构成为包括左前用连杆113a、左后用连杆114a(右前用连杆113b、右后用连杆114b)的曲柄机构(旋转-往复直线运动变换机构)而被变换为滑动件117的上下移动,由设置于滑动件117的下表面的模具等进行冲压加工。
76.根据该实施例1的结构,从左用驱动轴103a到左前用主齿轮107a为止的左前侧的驱动路径(驱动装置)中的齿轮的啮合点是a1、a2这合计2个。在从左用驱动轴103a到左后用主齿轮111a为止的左后侧的驱动路径(驱动装置)中啮合点也同样地是合计2个。
77.另外,从右用驱动轴103b到右前用主齿轮107b为止的右前侧的驱动路径(驱动装置)中的齿轮的啮合点是b1、b2这合计2个。在从右用驱动轴103b到右后用主齿轮111b为止的右后侧的驱动路径(驱动装置)中啮合点也同样地是合计2个。
78.因此,根据该实施例1的结构,通过控制单元150以消除各电动伺服马达的旋转相位差的方式进行同步(调谐)控制,能够抑制驱动装置的右侧、左侧、前侧、后侧的全部的主齿轮107a、111a、107b、111b的旋转的相位差,进而关于左前用连杆113a、左后用连杆114a、右前用连杆113b、右后用连杆114b的全部的移动(上下移动)抑制相位差。
79.另外,在实施例1中,由于设为使左用驱动轴103a和右用驱动轴103b独立且将左用驱动轴103a和右用驱动轴103b分别利用电动伺服马达101a、102a和电动伺服马达101b、102b来驱动的结构,所以能够在滑动件117的左右即在“左前用连杆113a及左后用连杆114a侧”和“右前用连杆113b及右后用连杆114b侧”使能力产生点位置(下止点附近)的冲压能力不同。
80.即,由于能够使滑动件117的左右方向上的冲压能力不同,所以在冲压左右非对称的部件的情况下、沿着左右方向设置有多个模具且分别冲压需要的冲压能力不同的部件(在冲压时产生偏心载荷的部件)的情况下等,能够在左右方向上赋予合适的冲压能力,从而能够生产高品质的冲压成型品。
81.另外,在本实施方式中,如图1的(a)、图1的(b)所示,能够设为使2个(一对)惰轮120a、120b(或121a、121b)介于左前用主齿轮107a(左后用主齿轮111a)与右前用主齿轮107b(右后用主齿轮111b)之间的结构。
82.惰轮120a、121a分别啮合于左前用主齿轮107a、左后用主齿轮111a,并且分别啮合于惰轮120b、121b。
83.并且,惰轮120b、121b分别啮合于右前用主齿轮107b、右后用主齿轮111b。
84.此外,惰轮120a相当于本发明的左前用惰轮,惰轮121a相当于本发明的左后用惰轮,惰轮120b相当于本发明的右前用惰轮,惰轮121b相当于本发明的右后用惰轮。
85.这样,若设为使惰轮120a(121a)及惰轮120b(121b)介于左前用主齿轮107a(或左后用主齿轮111a)与右前用主齿轮107b(或右后用主齿轮111b)之间的结构,则能够使“左前用主齿轮107a(或左后用主齿轮111a)”和“右前用主齿轮107b(或右后用主齿轮111b)”的移动机械地(构造性地)同步(调谐)。进而,能够使“左前用连杆113a及左后用连杆114a侧”和“右前用连杆113b及右后用连杆114b侧”的移动机械地(构造性地)同步(调谐)。
86.因此,能够对由控制单元150进行的软件性的同步(调谐)控制的简略化、低成本化作出贡献。
87.另外,若设为使惰轮120a(或121a)及惰轮120b(或121b)介于左前用主齿轮107a(或左后用主齿轮111a)和右前用主齿轮107b(或右后用主齿轮111b)的左右的主齿轮之间的本结构,则能够经由这些惰轮而使转矩在左右的主齿轮之间传递。
88.由此,以往,利用主小齿轮与主齿轮之间的1个啮合点(转矩传递路径)来使转矩从主小齿轮传递至主齿轮,但根据本结构,能够利用“主小齿轮与主齿轮的啮合点”和“惰轮与主齿轮的啮合点”这2个啮合点(转矩传递路径)来将转矩向主齿轮传递。
89.因而,在需要的主齿轮的绕旋转轴的转矩与不使惰轮介于之间的结构例相同的情况下,在本结构中,能够使向主齿轮的传递转矩在2个啮合点(转矩传递路径)分散,因此能够将作用于各啮合点(转矩传递路径)的负荷(传递转矩)抑制得低。因而,根据本结构,能够降低各齿轮的强度,因此能够对促进压力机的驱动装置的小型化、轻量化等作出贡献。
90.相反,在使各齿轮的强度相同的情况下,根据本结构,能够使向主齿轮的传递转矩在2个啮合点(转矩传递路径)分散,因此能够增大向主齿轮的总的传递转矩。因而,根据本结构,能够对增大电动伺服压力机的冲压能力作出贡献。
91.而且,在本结构中,能够在左前用主齿轮107a(或左后用主齿轮111a)和右前用主齿轮107b(或右后用主齿轮111b)的左右的主齿轮之间互相填补需要的转矩,因此能够在左右的主齿轮(或连杆)中进而在滑动件的左右方向上设为不同的能力产生点位置(下止点附近),该不同的能力产生点位置(下止点附近)处的传递转矩也能够在压力机整体的容许转矩(电动伺服马达能力)内左右分开。
92.因而,在冲压左右非对称的部件的情况下、沿着左右方向设置有多个模具且分别冲压需要的冲压能力不同的部件(在冲压时产生偏心载荷的部件)的情况下等,能够在压力机整体的容许转矩(电动伺服马达能力)内在左右方向上将合适的冲压能力分开赋予,从而能够生产高品质的冲压成型品。
93.如以上这样,根据本实施方式的实施例1,能够提供在具备电动伺服马达的电动伺服压力机中能够抑制驱动装置内的相位差而实现细致的冲压控制进而能够生产高品质的冲压产品的电动伺服压力机的驱动装置。
94.此外,在实施例1中,在左前用中间齿轮105a、右前用中间齿轮105b、左后用中间齿轮109a、右后用中间齿轮109b配设有与它们啮合的制动器装置118a、118b、119a、119b,构成为能够以使各主齿轮107a、107b、111a、111b的旋转停止的方式实施制动。这些制动器装置118a、118b、119a、119b构成为能够根据来自控制单元150的控制信号来控制其驱动(制动动作)。
95.为了应对电动伺服马达101a、101b、102a、102b的控制系统的异常,制动器装置118a、118b、119a、119b采用摩擦式(机械式)的摩擦制动器,能够作为用于在旋转停止中防止意外的旋转的驻车制动器发挥功能。另外,在安全方面的紧急时、失控时等使其紧急停止的情况下,也能够使制动器装置118a、118b、119a、119b作为紧急停止用制动器发挥功能。
96.在这样的情况下,从危险的避免和摩擦要素的磨损抑制等的兼顾的观点来看,控制单元150能够进行在正常的情况下在通过旋转停止控制(例如,电磁制动器控制)的执行而电动伺服马达旋转停止的预定停止时刻或其附近、摩擦要素实际与对象构件开始接触而
开始制动的控制。
97.即,在产生了紧急停止指令的情况下,将电动伺服马达101a、101b、102a、102b的控制切换为预定的动作(例如,以振动、噪音不会变大的范围内的最大加速度使其停止的动作),且进行积极地进行马达的旋转停止控制而将正常时的直到冲压停止为止的时间抑制为最短时间的控制。另外,不管马达旋转是正常还是异常,并且也不进行该判断,在经过了最短的设定时间时,解除旋转停止控制而切换为马达旋转自由状态,在该状态下以使制动器装置118a、118b、119a、119b实际地制动器工作(实际进行制动)的方式进行控制。
98.根据这样的结构,能够避免严酷的摩擦式(机械式)制动器工作并针对紧急停止指令在短时间内安全可靠地使其紧急停止,并且即使在发生了伺服马达的失控等的情况下也能够可靠且迅速地使其停止,而且,能够对提供操作性、作业效率优异的低成本的电动伺服压力机的驱动装置作出贡献。
99.接着,对本实施方式的实施例2的电动伺服压力机的驱动装置(机构)200进行说明。
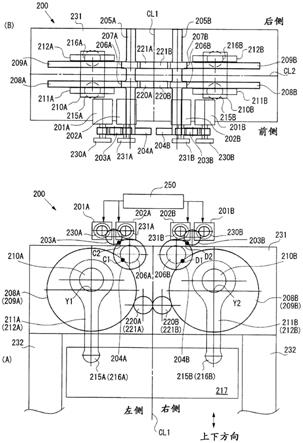
100.图2的(a)是实施例2的电动伺服压力机的驱动装置200的主视图,以将与本发明相关联的部分抽出且省略其他部分的方式示出。图2的(b)是图2的(a)的驱动装置涉及的部分的俯视图。
101.此外,在此,左是指比图2的(a)、(b)所示的中心线cl1靠左侧,右是指比该中心线cl1靠右侧。另外,前是指比图2的(b)所示的中心线cl2在图中靠下侧,后是指比该中心线cl2在图中靠上侧。
102.如图2的(a)、(b)所示,作为驱动源的伺服马达201a、202a构成为驱动它们的输出齿轮所啮合的共用的左用驱动齿轮203a旋转。该左用驱动齿轮203a构成为啮合于左用中间齿轮204a且驱动其旋转。右侧也是同样,作为驱动源的伺服马达201b、202b构成为驱动它们的输出齿轮所啮合的共用的右用驱动齿轮203b旋转。该右用驱动齿轮203b构成为啮合于右用中间齿轮204b且驱动其旋转。伺服马达201a、201b、202a、202b的驱动基于来自作为控制装置的控制单元250的驱动控制信号而被控制。
103.此外,标号231是在左右方向上延伸的框架(压力机的横梁),标号232是在重力方向上延伸的框架(压力机的立柱),也包括后述的伺服马达,实施例2的各伺服马达固定地安装于横梁231。另外,也包括后述的齿轮,实施例2的各齿轮例示了外周齿轮,并且相对于横梁231、立柱232经由轴承等而以旋转自如的方式被支承。
104.本实施例的电动伺服压力机的驱动装置(驱动机构)200除了一部分的非对称的部分之外,基本上是左右对称、前
·
后对称(前后对称)的构造,因此,除了非对称的部分之外,处于对称的位置的齿轮、轴等构成要素至少能够相互设为同一规格。
105.左用中间齿轮204a同轴地且大致一体地设置于左用驱动轴205a,并且在该左用驱动轴205a同轴地且大致一体地设置有左前用主小齿轮206a及左后用主小齿轮207a。此外,包括后述的驱动轴,实施例2的各驱动轴相对于横梁231、立柱232经由轴承等而以旋转自如的方式被支承。
106.在左前用主小齿轮206a啮合并旋转连接(旋转连结)有左前用主齿轮208a。同样,在左后用主小齿轮207a啮合并旋转连接(旋转连结)有左后用主齿轮209a。
107.另一方面,右用中间齿轮204b同轴地且大致一体地设置于右用驱动轴205b,并且
在设置于右用驱动轴205b的右前用主小齿轮206b啮合并旋转连接(旋转连结)有右前用主齿轮208b。同样,在右后用主小齿轮207b啮合并旋转连接(旋转连结)有右后用主齿轮209b。
108.在左前用主齿轮208a、左后用主齿轮209a大致一体地设置有从其共用的旋转轴y1偏置(偏心)的曲柄销210a,在该曲柄销210a以旋转自如的方式支承有左前用连杆211a、左后用连杆212a的基端侧。
109.经由左前用连杆211a、左后用连杆212a的顶端侧的支承部215a、216a而支承有滑动件217的左侧的前侧和后侧。
110.同样,在右前用主齿轮208b、右后用主齿轮209b大致一体地设置有从其共用的旋转轴y2偏置(偏心)的曲柄销210b,在该曲柄销210b以旋转自如的方式支承有右前用连杆211b、右后用连杆212b的基端侧。
111.经由右前用连杆211b、右后用连杆212b的顶端侧的支承部215b、216b而支承有滑动件217的右侧的前侧和后侧。
112.此外,滑动件217相对于横梁231、立柱232以上下移动自如的方式被支承。
113.在这样的结构中,构成为:若使各伺服马达201a、201b(202a、202b)基于来自控制单元250的驱动信号而进行旋转驱动,则旋转力向左用驱动齿轮203a(右用驱动齿轮203b)、左用中间齿轮204a(右用中间齿轮204b)、左前用主小齿轮206a(右前用主小齿轮206b)、左后用主小齿轮207a(右后用主小齿轮207b)、左前用主齿轮208a、左后用主齿轮209a(右前用主齿轮208b、右后用主齿轮209b)按该顺序依次传递,该旋转力经由构成为包括左前用连杆211a、左后用连杆212a(右前用连杆211b、右后用连杆212b)的曲柄机构(旋转-往复直线运动变换机构)而被变换为滑动件217的上下移动,由设置于滑动件217的下表面的模具等进行冲压加工。
114.根据该实施例2的结构,从左用驱动齿轮203a到左前用主齿轮208a(左后用主齿轮209a)为止的左前侧(左后侧)的驱动路径(驱动装置)中的齿轮的啮合点是c1、c2这合计2个。
115.另外,从右用驱动齿轮203b到右前用主齿轮208b(右后用主齿轮209b)为止的右前侧(右后侧)的驱动路径(驱动装置)中的齿轮的啮合点是d1、d2这合计2个。
116.因此,根据该实施例2的结构,通过控制单元250以消除各电动伺服马达的旋转相位差的方式进行同步(调谐)控制,能够抑制驱动装置的右侧、左侧、前侧、后侧的全部的主齿轮208a、209a、208b、209b的旋转的相位差,进而关于左前用连杆211a、左后用连杆212a、右前用连杆211b、右后用连杆212b的全部的移动(上下移动)抑制相位差。
117.另外,在实施例2中,由于设为使左用驱动轴205a、右用驱动轴205b独立且将左用驱动轴205a、右用驱动轴205b分别利用电动伺服马达201a、202a和电动伺服马达201b、202b来驱动的结构,所以能够在滑动件217的左右、即在“左前用连杆211a及左后用连杆212a侧”和“右前用连杆211b及右后用连杆212b侧”使能力产生点位置(下止点附近)的加压压力不同。
118.即,由于能够使滑动件217的左右方向上的冲压能力不同,所以在冲压左右非对称的部件的情况下、沿着左右方向设置有多个模具且分别冲压需要的冲压能力不同的部件(在冲压时产生偏心载荷的部件)的情况下等,能够在左右方向上赋予合适的冲压能力,从而能够生产高品质的冲压成型品。
119.另外,在实施例2中,如图2的(a)、图2的(b)所示,能够设为使2个(一对)惰轮220a(或221a)及惰轮220b(或221b)介于左前用主齿轮208a(左后用主齿轮209a)与右前用主齿轮208b(右后用主齿轮209b)之间的结构。
120.惰轮220a、221a分别啮合于左前用主齿轮208a、左后用主齿轮209a,并且分别啮合于惰轮220b、221b。
121.并且,惰轮220b、221b分别啮合于右前用主齿轮208b、右后用主齿轮209b。
122.此外,惰轮220a相当于本发明的左前用惰轮,惰轮221a相当于本发明的左后用惰轮,惰轮220b相当于本发明的右前用惰轮,惰轮221b相当于本发明的右后用惰轮。
123.这样,若设为使惰轮220a(或221a)及惰轮220b(或221b)介于左前用主齿轮208a(或左后用主齿轮209a)与右前用主齿轮208b(或右后用主齿轮209b)之间的结构,则能够使“左前用主齿轮208a(或左后用主齿轮209a)”和“右前用主齿轮208b(或右后用主齿轮209b)”的移动机械地(构造性地)同步(调谐)。进而,能够使“左前用连杆211a及左后用连杆212a侧”和“右前用连杆211b及右后用连杆212b侧”的移动机械地(构造性地)同步(调谐)。
124.因此,能够对由控制单元250进行的软件性的同步(调谐)控制的简略化、低成本化作出贡献。
125.另外,若设为使惰轮220a(或221a)及惰轮220b(或221b)介于左前用主齿轮208a(或左后用主齿轮209a)和右前用主齿轮208b(或右后用主齿轮209b)的左右的主齿轮之间的本结构,则能够经由这些惰轮而使转矩在左右的主齿轮之间传递。
126.由此,以往,利用主小齿轮与主齿轮之间的1个啮合点(转矩传递路径)来使传递从主小齿轮传递至主齿轮,但根据本结构,能够利用“主小齿轮与主齿轮的啮合点”和“惰轮与主齿轮的啮合点”这2个啮合点(转矩传递路径)来将转矩向主齿轮传递。
127.因而,在需要的主齿轮的绕旋转轴的转矩与不使惰轮介于之间的结构例相同的情况下,在本结构中,能够使向主齿轮的传递转矩在2个啮合点(转矩传递路径)分散,因此能够将作用于各啮合点(转矩传递路径)的负荷(传递转矩)抑制得低。因而,根据本结构,能够降低各齿轮的强度,因此能够对促进压力机的驱动装置的小型化、轻量化等作出贡献。
128.相反,在使各齿轮的强度相同的情况下,根据本结构,能够使向主齿轮的传递转矩在2个啮合点(转矩传递路径)分散,因此能够增大向主齿轮的总的传递转矩。因而,根据本结构,能够对增大电动伺服压力机的冲压能力作出贡献。
129.而且,在本结构中,能够在左前用主齿轮208a(或左后用主齿轮209a)和右前用主齿轮208b(或右后用主齿轮209b)的左右的主齿轮之间互相填补需要的转矩,因此能够在左右的主齿轮(或连杆)中进而在滑动件的左右方向上设为不同的能力产生点位置(下止点附近),该不同的能力产生点位置(下止点附近)处的传递转矩也能够在压力机整体的容许转矩(电动伺服马达能力)内左右分开。
130.因而,在冲压左右非对称的部件的情况下、沿着左右方向设置有多个模具且分别冲压需要的冲压能力不同的部件(在冲压时产生偏心载荷的部件)的情况下等,能够在压力机整体的容许转矩(电动伺服马达能力)内在左右方向上将合适的冲压能力分开赋予,从而能够生产高品质的冲压成型品。
131.如以上这样,根据本实施方式的实施例2,能够提供在具备电动伺服马达的电动伺服压力机中能够抑制驱动装置内的相位差而实现细致的冲压控制进而能够生产高品质的
冲压产品的电动伺服压力机的驱动装置。
132.此外,在实施例2中,与作为驱动源的伺服马达201a、202a的输出旋转轴同轴地配置有制动器装置230a、231a,构成为能够对伺服马达201a、202a的旋转施加制动。另外,同样,与伺服马达201b、202b的输出旋转轴同轴地配置有制动器装置230b、231b,构成为能够对伺服马达201b、202b的旋转施加制动。这些制动器装置230a、231a、230b、231b构成为能够根据来自控制单元250的控制信号来控制其驱动(制动动作)。此外,制动器装置230a、231a、230b、231b能够设为与在实施例1中说明的制动器装置同样的结构。
133.因此,与在实施例1中说明的同样,在实施例2中也是,能够使作为摩擦式(机械式)制动器装置的制动器装置230a、231a、230b、231b作为驻车制动器发挥功能,也能够使其作为紧急停止用制动器发挥功能。
134.在这样的情况下,从危险的避免和摩擦要素的磨损抑制等的兼顾的观点来看,控制单元250能够进行在正常的情况下在通过旋转停止控制(例如电磁制动器控制)的执行而伺服马达旋转停止的预定停止时刻或其附近、摩擦要素实际与对象构件开始接触而开始制动的控制。
135.即,在产生了紧急停止指令的情况下,将电动伺服马达201a、201b、202a、202b的控制切换为预定的动作(例如,以振动、噪音不会变大的范围内的最大加速度使其停止的动作),且进行积极地进行马达的旋转停止控制而将正常时的直到冲压停止为止的时间抑制为最短时间的控制。另外,不管马达旋转是正常还是异常,并且也不进行该判断,在经过了最短的设定时间时,解除旋转停止控制而切换为马达旋转自由状态,在该状态下以使制动器装置230a、231a、230b、231b实际制动器工作(实际进行制动)的方式控制。
136.根据这样的结构,能够避免严酷的摩擦式(机械式)制动器工作并针对紧急停止指令在短时间内安全可靠地使其紧急停止,并且即使在发生了伺服马达的失控等的情况下也能够可靠且迅速地使其停止,而且,能够对提供操作性、作业效率优异的低成本的电动伺服冲压的驱动装置作出贡献。
137.此外,在上述的各实施例中,由于设为了使各中间齿轮及各小齿轮介于各电动伺服马达的输出齿轮与各主齿轮之间的结构,所以能够将各电动伺服马达的输出齿轮与各主齿轮之间的减速比仅通过更换为规格不同的各中间齿轮及各小齿轮就比较容易地变更为各种各样的形态,因此能够根据用户的各种要求而选择并设定最佳的减速比,进而能够以低成本提供设定自由度高的用户友好的电动伺服压力机的驱动装置。
138.根据本发明,能够提供在具备电动伺服马达的电动伺服压力机中能够抑制驱动装置内的相位差而实现细致的冲压控制进而能够生产高品质的冲压产品的电动伺服压力机的驱动装置。
139.以上说明的实施方式只不过是用于说明本发明的例示,本发明不限定于此,能够在不脱离本发明的主旨的范围内施加各种变更。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1