一种视觉自动电感点焊机的上料结构的制作方法
1.本发明涉及电感加工设备技术领域,较为具体的,涉及到一种视觉自动电感点焊机的上料结构。
背景技术:
2.电感线圈是由导线一圈靠一圈地绕在绝缘管上,导线彼此互相绝缘,而绝缘管可以是空心的,也可以包含铁芯或磁粉芯,简称电感。绝大多数的电子元器件,如电阻器、电容器,扬声器等,都是生产部门根据规定的标准和系列进行生产的成品供选用。而电感线圈只有一部分如阻流圈、低频阻流圈,振荡线圈和lg固定电感线圈等是按规定的标准生产出来的产品,绝大多数的电感线圈是非标准件,往往要根据实际的需要,自行制作。由于电感线圈的应用极为广泛,如lc滤波电路、调谐放大电路、振荡电路、均衡电路、去耦电路等等都会用到电感线圈,因此绕制合适的电感线圈十分重要。
3.现有技术的电感线圈焊接首先需要将电感线圈的正面和反面区别开,随后将需要的正面和反面放置在相对应的治具内,随后对电感线圈进行焊接,电感线圈原来是通过皮带传送至振动盘,由于每一款电感线圈的规格都不同,现有的振动盘只能适用一款型号电感线圈,当需要使用另一种型号的电感线圈的时候需要更换匹配的振动盘进行电感线圈的正面和反面区分,该方式的流程较为繁琐,效率低下成本也较高。
技术实现要素:
4.有鉴于此,为了解决现有的振动盘只能适用一款型号电感线圈,当需要使用另一种型号的电感线圈的时候需要更换匹配的振动盘进行电感线圈的正面和反面区分,该方式的流程较为繁琐,效率低下成本也较高的问题,本发明提出一种视觉自动电感点焊机的上料结构,将原有的振动盘改为柔性振动盘,柔性振动盘适用任意型号的电感线圈,四角有音圈电机可以对电感线圈进行聚拢、散开以及移动的动作,同时柔性振动盘减少电感线圈划伤以及卡料的现象发生,随后通过识别结构识别正面和反面后通过通讯线给抓取装置一个指令,抓取装置的机械手采取旋转的方式到达需要抓取的电感线圈的位置,通过旋转和升降机械手的吸盘来抓取电感线圈输送到治具的相应位置,最后通过整形机构的压头的下压使得电感线圈与治具相对应的位置完全卡接,能够快速完成电感线圈排线,提高了制造效率,降低了生产成本,通用性强。
5.一种视觉自动电感点焊机的上料结构,其包括:机架1、进料机构2、储料仓、抓取装置13和识别机构12,所述进料机构2、储料仓、抓取装置13和识别机构12均与机架1上部连接,所述进料机构2的输出端、抓取装置13、识别机构12位于储料仓的上部,其特征在于:所述储料仓为柔性振动盘3,通过进料机构2将电感线圈输送至储料仓,储料仓对电感线圈进行振动,识别机构12对电感线圈进行正反的识别,抓取装置13将需要的电感线圈抓取后放置入治具内,为下一步的焊接做准备。
6.进一步的,柔性振动盘3内部结构包括:设于机架1上的底座板6,底座板6的外部罩
有隔音外壳7,所述隔音外壳7的上部设有承载平台5,所述底座板6的顶部的四周分别与四个振动器的底部固定连接,四个振动器位于隔音外壳7内腔体内。
7.进一步的,振动器包括音圈电机、安装板,音圈电机通过安装板与隔音外壳7的底部连接,四个音圈电机安装于底座板6的四个边角位置,构成四振源三轴振动平台,实现电感线圈在承载平台5上的翻转和水平位移动作,振动效果好。
8.进一步的,承载平台5的底面为四边形结构,并且振动器的个数为四个,使得承载平台5的震动效果好,能够较快的实现电感线圈的姿态改变。
9.进一步的,承载平台5的底面由可透光材质制成,并且承载平台5的下侧设有led背光灯,使得摄像装置清晰度高,识别以及拾取效率高。
10.进一步的,进料机构2为平振盘,平振盘内腔设有驱动器,通过振动将电感线圈抖落至储料仓的上表面。
11.进一步的,平振盘包括开关装置8和水平盘11,水平盘11为一端封闭另一端开口的结构,所述开关装置8位于水平盘11的开口处,开关装置8包括挡板9和锁接装置10,挡板9与锁接装置10连接,通过调节锁接装置10和挡板9的位置来控制挡板9底部与水平盘11的间距,从而控制电感线圈的速度,使得落在输送机构上的电感线圈不堆叠。
12.进一步的,抓取装置13包括机械手14、吸盘15、旋转臂16和控制器17,所述机械手14下部一端连接吸盘15,所述机械手14下部另一端连接旋转臂16,所述旋转臂16远离机械手14的一端连接控制器17,所述机械手14的上端设有多个气管连接口18,所述控制器17的后部设有与之对应的气管连接口18,控制器17的后部还设有信号连接口19和外部电源连接口20,信号连接口19通过通讯线与识别机构12连接,外部电源连接口20连接外部电源对抓取装置13供电。
13.进一步的,识别机构12为ccd相机。
14.进一步的,所述机械手14内部设有升降气缸,所述升降气缸与吸盘15的连杆连接,所述机械手14的下部设有旋转气缸,所述旋转气缸与吸盘15的连接杆连接。
15.进一步的,所述吸盘15的旋转角度为0
‑
270
°
,所述旋转臂16的旋转角度为0
‑
270
°
。
16.一种电感线圈抓取装置13的抓取电感线圈的方法:首先通过进料机构2将电感线圈输送至储料仓,储料仓对电感线圈进行翻转和水平位移动作,将设置识别机构12内的程序,设置为需要抓取的正面电感线圈或者反面线圈,识别机构12识别正面和反面后通过通讯线给抓取装置13一个指令,抓取装置13的机械手14采取旋转的方式到达需要抓取的电感线圈的位置,通过旋转和升降机械手14的吸盘15来抓取电感线圈输送到治具的相应位置。
17.本发明的有益效果:本发明提出一种视觉自动电感点焊机的上料结构,将原有的振动盘改为柔性振动盘3,柔性振动盘3适用任意型号的电感线圈,四角有音圈电机6可以对电感线圈进行聚拢、散开以及移动的动作,同时柔性振动盘3减少电感线圈划伤以及卡料的现象发生,随后通过识别结构识别正面和反面后通过通讯线给抓取装置13一个指令,抓取装置13的机械手14采取旋转的方式到达需要抓取的电感线圈的位置,通过旋转和升降机械手14的吸盘15来抓取电感线圈输送到治具的相应位置,提高了制造效率,降低了生产成本,通用性强。
附图说明
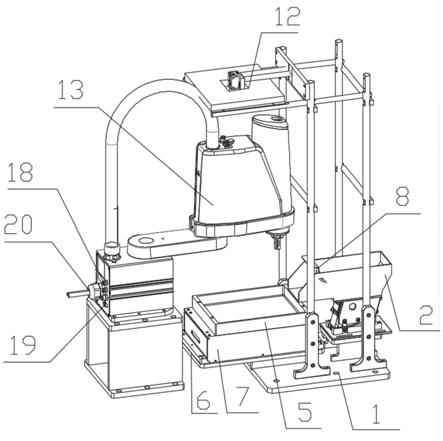
18.图1为本发明的视觉自动电感点焊机的上料结构的结构示意图。
19.图2为本发明的视觉自动电感点焊机的上料结构的结构示意图。
20.主要元件符号说明
21.机架1进料机构2柔性振动盘3承载平台5底座板6隔音外壳7开关装置8挡板9锁接装置10水平盘11识别机构12抓取装置13机械手14吸盘15旋转臂16控制器17气管连接口18信号连接口19外部电源连接口20
22.如下具体实施方式将结合上述附图进一步说明本发明。
具体实施方式
23.如图1所示,为本发明的视觉自动电感点焊机的上料结构的结构示意图;如图2所示,为本发明的视觉自动电感点焊机的上料结构的结构示意图。
24.一种视觉自动电感点焊机的上料结构,其包括:机架1、进料机构2、储料仓、抓取装置13和识别机构12,所述进料机构2、储料仓、抓取装置13和识别机构12均与机架1上部连接,所述进料机构2的输出端、抓取装置13、识别机构12位于储料仓的上部,其特征在于:所述储料仓为柔性振动盘3,通过进料机构2将电感线圈输送至储料仓,储料仓对电感线圈进行振动,识别机构12对电感线圈进行正反的识别,抓取装置13将需要的电感线圈抓取后放置入治具内,为下一步的焊接做准备。
25.所述柔性振动盘3内部结构包括:设于机架1上的底座板6,底座板6的外部罩有隔音外壳7,所述隔音外壳7的上部设有承载平台5,所述底座板6的顶部的四周分别与四个振动器的底部固定连接,四个振动器位于隔音外壳7内腔体内。
26.所述振动器包括音圈电机、安装板,音圈电机通过安装板与隔音外壳7的底部连接,四个音圈电机安装于底座板6的四个边角位置,构成四振源三轴振动平台,实现电感线
圈在承载平台5上的翻转和水平位移动作,振动效果好。
27.所述承载平台5的底面为四边形结构,并且振动器的个数为四个,使得承载平台5的震动效果好,能够较快的实现电感线圈的姿态改变。
28.所述承载平台5的底面由可透光材质制成,并且承载平台5的下侧设有led背光灯,使得摄像装置清晰度高,识别以及拾取效率高。
29.所述进料机构2为平振盘,平振盘内腔设有驱动器,通过振动将电感线圈抖落至储料仓的上表面。
30.所述平振盘包括开关装置8和水平盘11,水平盘11为一端封闭另一端开口的结构,所述开关装置8位于水平盘11的开口处,开关装置8包括挡板9和锁接装置10,挡板9与锁接装置10连接,通过调节锁接装置10和挡板9的位置来控制挡板9底部与水平盘11的间距,从而控制电感线圈的速度,使得落在输送机构上的电感线圈不堆叠。
31.所述抓取装置13包括机械手14、吸盘15、旋转臂16和控制器17,所述机械手14下部一端连接吸盘15,所述机械手14下部另一端连接旋转臂16,所述旋转臂16远离机械手14的一端连接控制器17,所述机械手14的上端设有多个气管连接口18,所述控制器17的后部设有与之对应的气管连接口18,控制器17的后部还设有信号连接口19和外部电源连接口20,信号连接口19通过通讯线与识别机构12连接,外部电源连接口20连接外部电源对抓取装置13供电。
32.所述识别机构12为ccd相机。
33.所述机械手14内部设有升降气缸,所述升降气缸与吸盘15的连杆连接,所述机械手14的下部设有旋转气缸,所述旋转气缸与吸盘15的连接杆连接。
34.所述吸盘15的旋转角度为0
‑
270
°
,所述旋转臂16的旋转角度为0
‑
270
°
。
35.一种电感线圈抓取装置13的抓取电感线圈的方法:首先通过进料机构2将电感线圈输送至储料仓,储料仓对电感线圈进行翻转和水平位移动作,将设置识别机构12内的程序,设置为需要抓取的正面电感线圈或者反面线圈,识别机构12识别正面和反面后通过通讯线给抓取装置13一个指令,抓取装置13的机械手14采取旋转的方式到达需要抓取的电感线圈的位置,通过旋转和升降机械手14的吸盘15来抓取电感线圈输送到治具的相应位置。
36.本发明的有益效果:本发明提出一种视觉自动电感点焊机的上料结构,将原有的振动盘改为柔性振动盘3,柔性振动盘3适用任意型号的电感线圈,四角有音圈电机6可以对电感线圈进行聚拢、散开以及移动的动作,同时柔性振动盘3减少电感线圈划伤以及卡料的现象发生,随后通过识别结构识别正面和反面后通过通讯线给抓取装置13一个指令,抓取装置13的机械手14采取旋转的方式到达需要抓取的电感线圈的位置,通过旋转和升降机械手14的吸盘15来抓取电感线圈输送到治具的相应位置,提高了制造效率,降低了生产成本,通用性强。
37.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1