一种智能的数控仿形车床及其工作方法与流程
本发明涉及高精密机械设备的,尤其涉及一种智能的数控仿形车床,以及这种智能的数控仿形车床的工作方法。
背景技术:
1、数控机床是按照事先编制好的加工程序,自动地对被加工零件进行加工。我们把零件的加工工艺路线、工艺参数、刀具的运动轨迹、位移量、切削参数以及辅助功能,按照数控机床规定的指令代码及程序格式编写成加工程序单,再把这程序单中的内容记录在控制介质上,然后输入到数控机床的数控装置中,从而指挥机床加工零件。
2、数控车床是使用较为广泛的数控机床之一。它主要用于轴类零件或盘类零件的内外圆柱面、任意锥角的内外圆锥面、复杂回转内外曲面和圆柱、圆锥螺纹等切削加工,并能进行切槽、钻孔、扩孔、铰孔及镗孔等。
3、现有的普通数控车床上只能安装一把刀具,一次只能加工活塞环的某一面,对于加工单个零件不同位置还需要更换相应的刀具,且由于活塞环较薄,因此在刀具对活塞环的加工过程中会产生形变,导致加工精度低,自动化程度不高。
技术实现思路
1、为克服现有技术的缺陷,本发明要解决的技术问题是提供了一种智能的数控仿形车床,其能够智能地实现同时对待加工产品的内外表面进行仿形加工,自动化程度强、加工误差小、效率高。
2、本发明的技术方案是:这种智能的数控仿形车床,其包括床身(ⅰ)、 x轴驱动系统(ⅱ)、仿形系统(ⅲ)、内侧刀驱动系统(ⅳ)、工装夹具 (ⅴ)、床头箱(ⅵ);
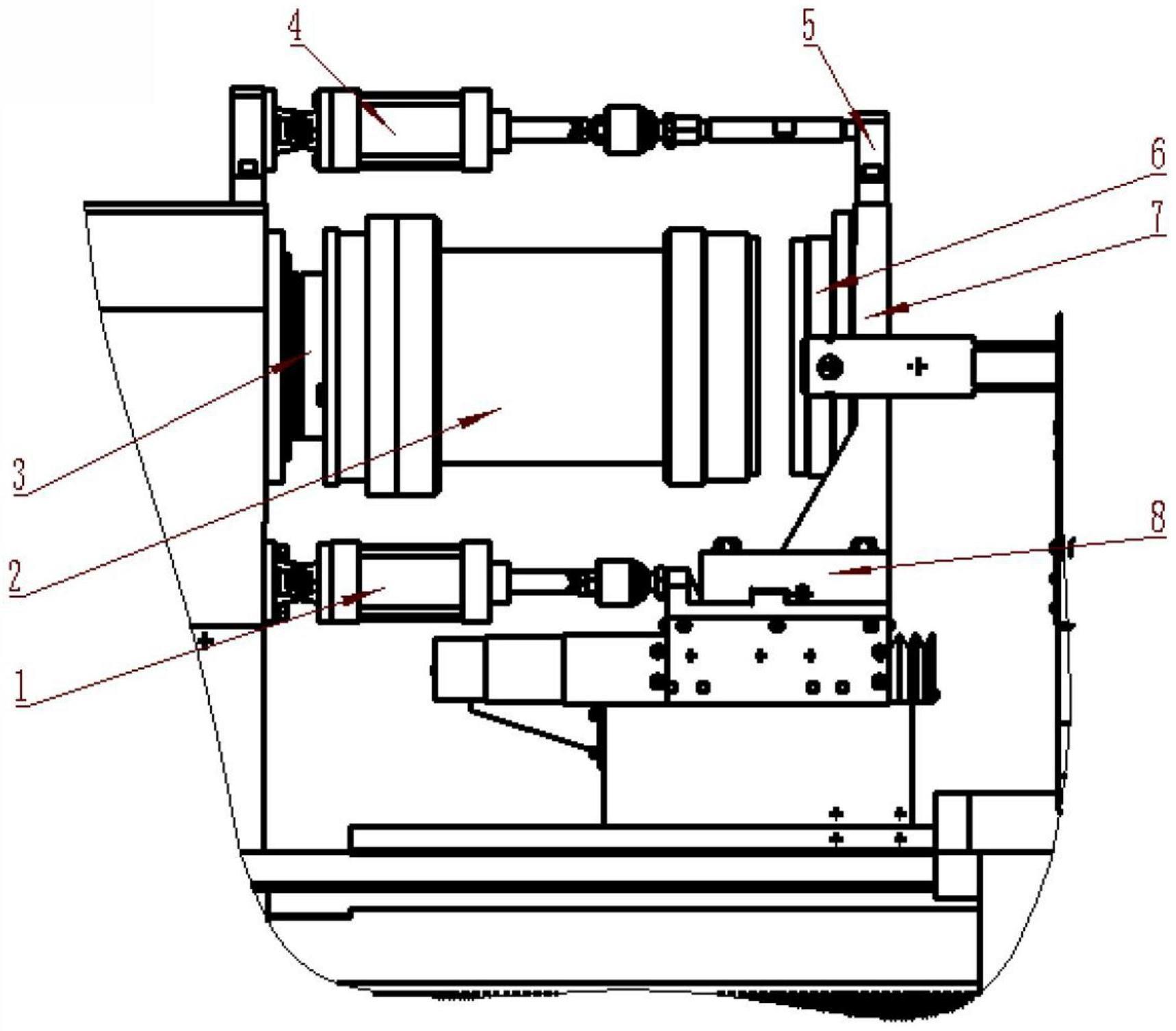
3、第一固定座(5)与第二固定座(8)同时固定在旋转座(7)上,通过气缸(4)收缩拉动第一固定座(5)以及气缸(1)收缩,拉动第二固定座(8),带动固定在旋转座(7)上的卡座(6)将待加工件固定在工装座(2)上;
4、工装座(2)固定在床头箱(ⅵ)中的卡盘(3)上,床头箱(ⅵ)
5、通过驱动卡盘(3)带动工装座(2)一起旋转,从而驱动待加工件与卡座(6)一起同步旋转;
6、仿形系统(ⅲ)与内侧刀驱动系统(ⅳ)一起固定在x轴驱动系统 (ⅱ)上,当x轴驱动系统(ⅱ)沿x轴方向移动一定行程时,内侧刀驱动系统(ⅳ)将往x轴驱动系统(ⅱ)移动的相反方向移动双倍距离;
7、仿形系统(ⅲ)在工控机的控制下同时驱动左刀具(26)与右刀具 (23)对活塞环进行仿形加工。
8、本发明通过第一固定座与第二固定座同时固定在旋转座7上,通过气缸收缩拉动第一固定座以及气缸收缩,拉动第二固定座,带动固定在旋转座上的卡座将待加工件固定在工装座上;工装座固定在床头箱中的卡盘上,床头箱通过驱动卡盘带动工装座一起旋转,从而驱动待加工件与卡座一起同步旋转;仿形系统与内侧刀驱动系统一起固定在x轴驱动系统上,当x轴驱动系统沿x轴方向移动一定行程时,内侧刀驱动系统将往x轴驱动系统移动的相反方向移动双倍距离;仿形系统在工控机的控制下同时驱动左刀具与右刀具对活塞环进行仿形加工;从而能够智能地实现同时对待加工产品的内外表面进行仿形加工,自动化程度强、加工误差小、效率高。
9、还提供了一种智能的数控仿形车床的工作方法,其包括以下步骤:
10、(i)人工将活塞环放置于工装座(2)上,然后气缸(1)与气缸(4)
11、一起收缩使卡座(6)将待加工件固定好;
12、(ii)x轴驱动系统(ⅱ)与内侧刀驱动系统(ⅳ)在工控机的控制下驱动左刀具(26)与右刀具(23)定好加工位置;
13、(iii)仿形系统(ⅲ)在工控机的控制下驱动左刀具(26)与右刀具
14、(23)进行整体移动对活塞环进行仿形加工,直到加工出最终产品。
技术特征:
1.一种智能的数控仿形车床,其特征在于:其包括床身(ⅰ)、x轴驱动系统(ⅱ)、仿形系统(ⅲ)、内侧刀驱动系统(ⅳ)、工装夹具(ⅴ)、床头箱(ⅵ);
2.根据权利要求1所述的智能的数控仿形车床,其特征在于:旋转座(7)为固定不动的。
3.根据权利要求2所述的智能的数控仿形车床,其特征在于:x轴伺服电机(12)固定在支撑座(10)上,x轴伺服电机(12)在工控机的控制下驱动丝杆(11)带动刀架下部滑板(9)沿x轴方向做往复运动。
4.根据权利要求3所述的智能的数控仿形车床,其特征在于:伺服电机(14)固定在电机座(16)上,伺服电机(14)在工控机的控制下驱动丝杆(15)通过滑块(12)带动刀台(13)做仿形运动,刀台(13)的运动轨迹即为待加工活塞环横截面中心线。
5.根据权利要求4所述的智能的数控仿形车床,其特征在于:小基座(19)固定在刀台(13)上随刀台做仿形运动,伺服电机(17)固定在小电机座(18)上,小电机座(18)固定在小基座(19)上,右刀具(23)固定在刀座(22)上,刀座(22)固定在安装板(21)上,伺服电机(17)在工控机的控制下驱动丝杆(20)带动右刀具(23)做切削进给运动。
6.根据权利要求5所述的智能的数控仿形车床,其特征在于:垫块(24)固定在刀台(13)上,刀座(25)固定在垫块(24)上,左刀具(26)固定在刀座(25)上,因此左刀具(26)能随仿形系统(ⅲ)做仿形运动的同时又能随x轴驱动系统(ⅱ)一起同步完成对活塞环的加工进给。
7.一种智能的数控仿形车床的工作方法,其特征在于:其包括以下步骤:
技术总结
一种智能的数控仿形车床及工作方法,第一固定座(5)与第二固定座(8)同时固定在旋转座(7)上,通过气缸(4)收缩拉动第一固定座(5)以及气缸(1)收缩,拉动第二固定座(8),带动固定在旋转座上的卡座(6)将待加工件固定在工装座(2)上;工装座固定在床头箱中的卡盘(3)上,床头箱通过驱动卡盘带动工装座旋转,从而驱动待加工件与卡座一起同步旋转;仿形系统与内侧刀驱动系统一起固定在X轴驱动系统上,当X轴驱动系统沿X轴方向移动一定行程时,内侧刀驱动系统将往X轴驱动系统移动的相反方向移动双倍距离;仿形系统在工控机的控制下同时驱动左刀具(26)与右刀具(23)对活塞环进行仿形加工。
技术研发人员:郭胜安,雷立猛,柳茂
受保护的技术使用者:湖南金岭机床股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!