一种补装绝缘子串金具与联板固定螺栓上缺失销钉的工具的制作方法
1.本发明属于输电线路维护设备领域,具体为一种补装绝缘子串金具与联板固定螺栓上缺失销钉的工具。
背景技术:
2.高压输电线路上绝缘子串两端的金具与联板连接时,基本上采用金具夹持联板,然后通过螺栓连接螺母锁紧。
3.为了便于螺栓、螺母的安装操作,将螺栓从下往上安装,在穿过金具和联板后的螺栓杆体上连接螺母,为了防止螺母松动螺栓掉落,会在螺栓杆体上对应螺母的上方垂直安装一个开口销钉。
4.而高压输电线路暴露在野外,长期经历风吹日晒,面对狂风暴雨、电闪雷鸣等恶劣气候条件时,导线和绝缘子串均会出现较大幅度的摆动。由于开口销钉一般为铝销钉,安装时将其开口端折弯限位。所以在导线和绝缘子串较大幅度的摆动过程中还是会出现销钉掉落的情形。
5.销钉掉落后如不及时补装将可能发生绝缘子串掉串、输电线路掉线等故障,造成供电中断或人身触电事故,后果不堪设想。
6.目前输电线路的检修方式主要是人工带电检修,常见的销钉补装等工作都必须由作业人员登塔上线进行等电位操作方可完成,劳动强度大、工作效率低、而且还存在严重的人身安全隐患。
技术实现要素:
7.本发明的目的在于提供一种可安装于巡检机器人手臂末端自动补装绝缘子串金具与联板固定螺栓上缺失销钉的工具。
8.本发明提供的这种补装绝缘子串金具与联板固定螺栓上缺失销钉的工具,包括主体座、驱动装置、丝杆传动机构、推板、滑块座、销钉套筒座和销钉弯曲机构;驱动装置安装于主体座上,其动力输出结构为主动齿轮;丝杆传动机构安装于主体座上,包括丝杆及连接于其上的螺母座和连接于其一端的从动齿轮;从动齿轮与主动齿轮啮合,实现丝杆的转动及螺母座沿丝杆的移动;推板平行与丝杆布置与螺母座连接;滑块座与推板垂直布置并连为一体;推板的一端为销钉顶推端,另一端为销钉夹持端;销钉套筒固定于主体座上对应推板的销钉顶推端外;销钉弯曲机构包括主动臂和其铰接的从动臂,主动臂的末端与滑块座铰接,从动臂的末端套于销钉套筒外;销钉套筒内和推板的销钉夹持端分别设置有图像采集摄像头。
9.上述技术方案的一种实施方式中,所述主体座上有分别用于安装所述驱动装置和丝杆传动机构的安装槽。
10.上述技术方案的一种实施方式中,所述推板的销钉顶推端垂直设置有圆弧凸板,销钉夹持端连接有弹性u形夹。
11.上述技术方案的一种实施方式中,所述推板的销钉夹持端设置有两限位杆和它们外侧半圆柱形的限位柱,所述弹性u形夹的封闭端插接于限位杆和限位柱之间。
12.上述技术方案的一种实施方式中,所述主体座上对应所述推板的销钉夹持端段设置有限位凸台,限位凸台的宽度方向中间位置有宽度与所述弹性u形夹宽度匹配的通槽,通槽的末端为外扩喇叭口。
13.上述技术方案的一种实施方式中,所述滑块座包括u型的联板座和其两侧臂内侧对称连接的滑块。
14.上述技术方案的一种实施方式中,所述联板座横跨所述推板和主体座,主体座的两侧设置有所述滑块匹配的滑轨,联板座与推板连接固定。
15.上述技术方案的一种实施方式中,所述联板座的一侧设置有外伸的耳板,所述销钉弯曲机构的主动臂与耳板通过销轴铰接。
16.上述技术方案的一种实施方式中,所述销钉套筒座包括座体和套筒,座体的形状为7字型,其长臂与所述主体座连接,其短臂上设置有与所述推板宽度匹配的推槽,套筒设置于推槽底面的前端,套筒外壁顶部设置有内凹卡接槽。
17.上述技术方案的一种实施方式中,所述销钉弯曲机构的从动臂末端为圆环体,卡接于所述套筒外部的内凹卡接槽处,圆环体的外壁沿轴向设置有销钉推弯柱。
18.本工具安装于巡检机器人的手臂末端后,可通过机器人手臂的运动及本工具驱动装置驱动丝杆传动机构运动,使推板左右移动来实现开口销钉的夹持推送,以及在开口销钉推送插入螺栓杆体上的安装孔后,将开口销钉顶推至合适位置,最后通过销钉弯曲机构将开口销钉的开口端弯曲限位安装于螺栓杆体上。全程可自动操作,作业人员只需在地面根据工具上图像采集摄像头拍摄的视频来控制巡检机器人的手臂动作及本工具的伺服电机工作,将开口销钉准确插入螺栓杆上的销钉安装孔中和将插入安装孔的开口销钉顶推至合适位置后弯曲限位,安全高效。
附图说明
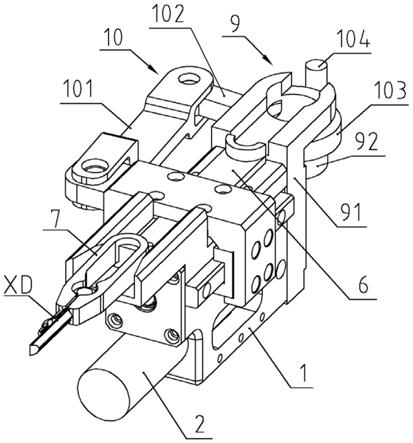
19.图1为本发明一个实施例的轴侧结构示意图。
20.图2为本实施例另一个方位的轴侧结构示意图。
21.图3为本实施例去掉销钉套筒座和销钉弯曲机构后的轴侧结构示意图。
22.图4为图3去掉推板、滑块座和弹性u形夹后的轴侧结构示意图。
具体实施方式
23.如图1至图4所示,本实施例公开的这种补装绝缘子串金具与联板固定螺栓上缺失销钉的工具,包括主体座1、伺服电机2、主动齿轮3、从动齿轮3a、丝杆4、螺母座5、推板6、弹性u形夹7、滑块座8、销钉套筒座9和销钉弯曲机构10。
24.主体座1为长方体座,其底部有伺服电机安装槽,顶部有丝杆安装槽。
25.伺服电机2的输出轴通过联轴器连接主动齿轮3,主动齿轮位于主体座的端面外,主动齿轮的正上方啮合从动齿轮3。
26.丝杆4与从动齿轮3a共轴向中心线布置于主体座上的安装槽中,丝杆上连接有螺母座5,丝杆的一端通过联轴器与从动齿轮连接。
27.所以伺服电机2工作,即可通过主动齿轮3、从动齿轮3a实现丝杆4的转动。
28.推板6平行布置于丝杆4的上方,推板的宽度大于丝杆安装槽的宽度,其下表面贴于主体座1上,其中部通过螺栓与螺母座5连接固定。
29.丝杆4的转动可通过螺母座5实现推板6的左右移动。
30.推板6的两端分别为销钉顶推端和销钉夹持端。
31.推板6的销钉顶推端垂直设置有圆弧凸板61,销钉夹持端连接有弹性u形夹7。
32.推板6的销钉夹持端设置有两限位杆62和它们外侧半圆柱形的限位柱63,弹性u形夹7的封闭端插接于限位杆和限位柱之间固定。
33.弹性u形夹7用于夹持初始状态的开口销钉xd。
34.主体座1上对应推板6的销钉夹持端段两侧设置有限位凸台11,限位凸台的宽度方向中间位置有宽度与弹性u形夹7宽度匹配的通槽,通槽的末端为外扩喇叭口。
35.滑块座8包括倒u形的联板座81和其两侧臂内侧对称连接的滑块82联板座的两侧臂下端有位于滑块下侧的水平折边,联板座81的一侧设置有水平外伸的耳板811。
36.联板座81横跨推板中部和主体1,主体座1的两侧设置有滑块匹配的滑轨12。
37.联板座81与推板6的中部通过螺栓连接固定。
38.伺服电机2工作使推板6移动时,联板座81随之一起移动。
39.销钉套筒9固定于主体座1上对应推板6的销钉顶推端外。
40.销钉套筒座9包括座体91和套筒92,座体91的形状为7字型,其长臂与主体座1的端面连接,且长臂上设置有用于嵌装主动齿轮3和从动齿轮3a的安装槽。座体91的短臂上设置有与推板6宽度匹配的推槽,套筒92设置于推槽底面的前端,套筒92外壁顶部设置有内凹卡接槽。
41.销钉弯曲机构10包括主动臂101和其铰接的从动臂102,主动臂的末端通过销轴与联板座一侧的耳板811铰接,从动臂102末端为圆环体103,卡接于套筒92外部的内凹卡接槽处,圆环体103的外壁沿轴向设置有销钉推弯柱104。
42.销钉套筒内和推板的销钉夹持端分别设置有图像采集摄像头(图中未示出)。
43.将本工具固定于机器人的手臂末端补装绝缘子串金具与联板固定螺栓上的开口销钉时,具体过程如下:
44.(1)在工具的弹性u形夹中固定开口销钉,然后将工具固定于机器人机体上的插接座中。
45.弹性u形夹固定销钉时,将销钉头部端插入弹性u形夹的夹口中,伺服电机工作使主动齿轮驱动从动齿轮转动,从动齿轮带动丝杆转动,丝杆上的螺母座向内移动,使推板向内移动,弹性u形夹随推板向内移动越过主体座上喇叭口的内端,使弹性u形架将开口销钉夹紧。
46.(2)机器人在导线上行走至销钉补装处附件时,在导线上停住,其手臂末端与插接座中的本工具连接并将工具从插接座中拔出,然后手臂运动使本工具上的开口销钉对正螺栓杆体上的销钉安装孔
47.(3)工具的伺服电机工作,使丝杆上的螺母座带着推板向外移动,将销钉插入销钉安装孔内(根据推板销钉夹持端设置的图像采集摄像头拍摄画面控制),同时弹性u形夹失去主座体上限位凸台的限制自动松开开口销钉。
48.(4)伺服电机反向工作,使丝杆反向转动,螺母座带着推板及弹性u形夹回缩。
49.(5)机器人手臂运动,使本工具旋转180
°
,使其销钉套筒座的套筒同时套住螺栓杆体和开口销钉,此时螺栓杆体上插好的开口销钉位于销钉套筒座体上的推槽中。
50.(6)伺服电机工作,丝杆转动,推板的销钉顶推端向外移动将推槽中的开口销钉顶推至合适位置;
51.(7)伺服电机工作,滑块座的联板座推动销钉弯曲机构的从动臂的末端转动将开口销钉的开口端弯曲至满足规范要求。
52.(8)机器人携带本工具退出工作位。
53.上述操作过程中中,通过分别内置于销钉一字套筒内和销钉插入机构旁边的两个图像采集摄像头,辅助人工远程操控机械臂及其末端工具实现销钉孔径的对准和对接,以及金具销钉拔插的视觉伺服定位控制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1