一种自动焊接机械手的制作方法
1.本发明涉及机械手技术领域,具体的说是一种自动焊接机械手。
背景技术:
2.焊接机械手可代替人的繁重劳动以实现生产的焊接的自动化,能在危险的环境下操作以保护人身安全,因而广泛应用于机械制造的间接领域,而目前的大多数机械手焊接结构复杂,制造繁琐困难,导致生产成本高,且无法实现各个机构配合的全方位的自动化。
技术实现要素:
3.针对现有技术中的问题,本发明提供了一种自动焊接机械手。
4.本发明解决其技术问题所采用的技术方案是:一种自动焊接机械手,包括底座,所述底座上端连接旋转机构,所述旋转机构内部设置有抬升机构,所述抬升机构的一侧设置有拉伸机构,所述拉伸机构顶部设有转动销,所述转动销连接焊接机构。
5.优选的,所述底座上端连接有旋转机构,所述旋转机构包括第一电机,所述第一电机连接第一皮带,所述第一皮带连接第一转轴,所述第一转轴上端连接啮合块,所述第一转轴下端啮合小齿轮,所述小齿轮啮合大齿轮,所述大齿轮齿面上固定底板。
6.优选的,所述底板和两个一号限位槽的底部固定连接,所述两个一号限位槽和移动板滑动卡合,所述移动板内侧一段连接于衔块,所述衔块和一号长杆相连,所述一号长杆和横杆通过第二活动销相连,且横杆和二号长杆通过第一活动销连接,所述横杆和焊接机构通过转动销连接。
7.优选的,所述焊接机构包括第三电机,所述第三电机连接第三转轴,所述第三转轴外侧连接第三皮带,所述第三皮带连接第三带轮,所述第三带轮中心处固定有中心轴,所述第三电机下方中心轴连接转盘,所述转盘下方连接八根焊接条。
8.优选的,所述拉伸机构包括摇摆杆,所述摇摆杆上端连接竖杆,所述竖杆固定于三脚旋架的一个架角,且三脚旋架通过旋转轴固定于横杆,所述三脚旋架的另一脚连接直杆,所述直杆连接侧板,所述侧板固定焊接机构,且侧板和横杆通过转动销活动连接。
9.优选的,所述抬升机构包括第二电机,所述第二电机连接第二转轴,所述第二转轴啮合螺旋块,且螺旋块的初始位置远离第二电机,所述螺旋块和移动块固定焊接,所述移动块贴合在二号限位槽,所述移动块的上表面设置有固定块,且固定块和移动块上表面固定连接,所述一号长杆和二号长杆通过连接杆相连接。本发明有益效果:
10.(1)本发明是通过打开第三电机,通过第三电机带动第三转轴转动,此时由于第三转轴外侧绕有第三皮带,第三转轴将带动第三皮带转动,由于第三皮带另一端绕有第三带轮,第三皮带将带动着第三带轮转动,而第三带轮中心处固定有中心轴,所以第三带轮将驱动中心处的中心轴转动,而中心轴连接下方的转盘,带动转盘进行转动,转盘下方安装有焊接条,在转盘转动的过程中,使得焊接条可以旋转到合适的位置,便于在焊接时,每一根焊条都能够进行焊接,可以快速的,持续的,稳定的进行焊接。
11.(2)本发明通过一号限位槽的底部和底板固定连接,使得一号限位槽直立于底板上,而移动板的两侧紧紧贴合一号限位槽,移动板在上移的过程中沿着一号限位槽的导轨移动,而由于衔块分别和移动板、一号长杆活动连接,导致在移动板上移时,衔块也随着移动板一起向上移动,由于衔块得另一端还活动连接着一号长杆,使得衔块在向上移动的过程中,将带动着一号长杆一起向上移动,由于一号长杆和横杆通过第二活动销相连,在一号长杆向上移动时,推动横杆绕着第一活动销由上到下转动,从而可以实现横杆将带动着焊接机构由上到下运动。
12.(3)本发明通过螺旋块推动移动块两端沿着二号限位槽的两端进行水平移动,此时移动块上表面固定有固定块,固定块连接有活动轴,二号长杆穿过活动轴连接固定块两端,另外一号长杆和二号长杆之间通过连接杆连接,且连接杆和活动轴连接,在一号长杆向上移动时,带动着连接杆向上上移,连接杆就会绕着活动轴进行转动,而活动轴和一端的摇摆杆相连,带动摇摆杆绕着活动轴转动,从而实现了拉伸机构对焊接机构的角度调整。
附图说明
13.下图结合附图和实施例对本发明进一步说明。
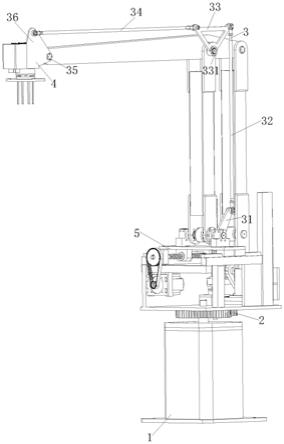
14.图1为本发明的整体结构示意图;
15.图2为本发明另一整体结构示意图;
16.图3为图1焊接机构示意图;
17.图4为图3所示焊接机构底部转盘机构示意图;
18.图5为图1的旋转机构的示意图;
19.图中:1、底座;2、旋转机构;21、第一皮带;22、啮合块;23、移动板;24、衔块;25、一号限位槽;26、第一活动销;27、一号长杆;271、第二活动销;272、二号长杆;28、横杆;291、小齿轮;292、大齿轮;293、第一转轴;294、底板;3、拉伸机构;31、摇摆杆;32、竖杆;33、三脚旋架;331、旋转轴;34、直杆;35、转动销;36、侧板;4、焊接机构;41、第三电机;42、第三皮带;43、第三转轴;44、第三带轮;45、转盘;46、焊接条;47、中心轴;5、抬升机构;51、第一电机;52、二号限位槽;53、第二转轴;54、第二电机;55、移动块;56、螺旋块;57、固定块;58、连接杆;59、活动轴。
具体实施方式
20.为了实现本发明的技术手段、创作特征、达成目的与功效易于理解,下面结合具体的实施方式,进一步阐述。
21.如图1-图5所示,本发明的一种自动焊接机械手,其特征在于:包括底座1,所述底座1上端连接旋转机构2,所述旋转机构2内部设置有抬升机构5,所述抬升机构5的一侧设置有拉伸机构3,所述拉伸机构3顶部设有转动销35,所述转动销35连接焊接机构4。
22.具体的,所述底座1上端连接有旋转机构2,所述旋转机构2包括第一电机51,所述第一电机51连接第一皮带21,所述第一皮带21连接第一转轴293,所述第一转轴293上端连接啮合块22,所述第一转轴293下端啮合小齿轮291,所述小齿轮291啮合大齿轮292,所述大齿轮292齿面上固定底板294。具体工作时,首先将底座1固定于操作台上,然后接通电源,打开第一电机51,第一电机51输出端带动第一皮带21转动,由于第一皮带21连接第一转轴
293,第一皮带21带动第一转轴293转动,由于啮合块22啮合于第一转轴293,当第一转轴293在转动时,啮合块22将会向上移动,与此同时,第一转轴293的下方连接着小齿轮291的中心,在第一转轴293转动,小齿轮291更随着第一转轴293一起转动,转动的小齿轮291就会带动和小齿轮291啮合的大齿轮292,由于大齿轮292中心装有轴承,且大齿轮292的上表面固定连接有底板294,所以在大齿轮292转动时,同时,将会带动底板294上的机构一起进行转动,从而实现了焊接机构4中焊接条46位置的改变,能够调整焊接的位置。
23.具体的,所述底板294和两个一号限位槽25的底部固定连接,所述两个一号限位槽25和移动板23滑动卡合,所述移动板23内侧一段连接于衔块24,所述衔块24和一号长杆27相连,所述一号长杆27和横杆28通过第二活动销271相连,且横杆28和二号长杆272通过第一活动销26连接,所述横杆28和焊接机构4通过转动销35连接。具体工作时,在当啮合块22开始向上移动时,啮合块22带动移动板23向上移动,由于一号限位槽25的底部和底板294固定连接,使得一号限位槽25直立于底板294上,而移动板23的两侧紧紧贴合一号限位槽25,移动板23在上移的过程中沿着一号限位槽25的导轨移动,而由于衔块24分别和移动板23、一号长杆27活动连接,导致在移动板23上移时,衔块24也随着移动板23一起向上移动,由于衔块24得另一端还活动连接着一号长杆27,使得衔块24在向上移动的过程中,将带动着一号长杆27一起向上移动,由于一号长杆27和横杆28通过第二活动销271相连,在一号长杆27向上移动时,推动横杆28绕着第一活动销26由上到下转动,从而可以实现横杆28将带动着焊接机构4由上到下运动。
24.具体的,所述焊接机构4包括第三电机41,所述第三电机41连接第三转轴43,所述第三转轴43外侧连接第三皮带42,所述第三皮带42连接第三带轮44,所述第三带轮44中心处固定有中心轴47,所述第三电机41下方中心轴47连接转盘45,所述转盘45下方连接八根焊接条46。具体工作时,通过其它的机构的合力运作,将焊接机构4运行到合适的焊接操作区间,此时,打开第三电机41,通过第三电机41带动第三转轴43转动,此时由于第三转轴43外侧绕有第三皮带42,第三转轴43将带动第三皮带42转动,由于第三皮带42另一端绕有第三带轮44,第三皮带42将带动着第三带轮44转动,而第三带轮44中心处固定有中心轴47,所以第三带轮44将驱动中心处的中心轴47转动,而中心轴47连接下方的转盘45,带动转盘45进行转动,转盘45下方安装有焊接条46,在转盘45转动的过程中,使得焊接条46可以旋转到合适的位置,便于在焊接时,每一根焊条都能够进行焊接,可以快速的,持续的,稳定的进行焊接。
25.具体的,所述拉伸机构3包括摇摆杆31,所述摇摆杆31上端连接竖杆32,所述竖杆32固定于三脚旋架33的一个架角,且三脚旋架33通过旋转轴331固定于横杆28,所述三脚旋架33的另一脚连接直杆34,所述直杆34连接侧板36,所述侧板36固定焊接机构4,且侧板36和横杆28通过转动销35活动连接。具体工作时,在第二电机54带动着移动块55沿着二号限位槽52进行水平移动时,就会带动摇摆杆31水平移动,从而就会带动着和摇摆杆31连接的竖杆32在竖直位置上的左右摆动,当摆动的幅度过大时,竖杆32将会拉动三脚旋架33绕着旋转轴331移动,在竖杆32向下移动时,三脚旋架33将绕着旋转轴331顺时针转动,此时,三脚旋架33的另一个的支角带动直杆34沿着三脚旋架33旋转方向移动,焊接机构4在直杆34的带动下,焊接机构4将绕着转动销35进行转动。
26.具体的,所述抬升机构5包括第二电机54,所述第二电机54连接第二转轴53,所述
第二转轴53啮合螺旋块56,且螺旋块56的初始位置远离第二电机54,所述螺旋块56和移动块55固定焊接,所述移动块55贴合在二号限位槽52,所述移动块55的上表面设置有固定块57,且固定块57和移动块55上表面固定连接,所述一号长杆27和二号长杆272通过连接杆58相连接。具体工作时,在第一电机51将底板294转动到合适的位置时,此时打开第二电机54,通过第二电机54带动第二转轴53转动,由于第二转轴53啮合螺旋块56,螺旋块56固定连接移动块55的下端面,所以当第二电机54带动着第二转轴53转动,从而第二转轴53带动螺旋块56,进而螺旋块56推动移动块55两端沿着二号限位槽52的两端进行水平移动,此时移动块55上表面固定有固定块57,固定块57连接有活动轴59,二号长杆272穿过活动轴59连接固定块57两端,另外一号长杆27和二号长杆272之间通过连接杆58连接,且连接杆58和活动轴59连接,在一号长杆27向上移动时,带动着连接杆58向上上移,连接杆58就会绕着活动轴59进行转动,而活动轴59和一端的摇摆杆31相连,带动摇摆杆31绕着活动轴59转动,从而实现了拉伸机构3对焊接机构4的角度调整。
27.本发明提供的一种自动焊接机械手的工作原理如下:
28.首先将底座1固定于操作台上,然后接通电源,打开第一电机51,第一电机51输出端带动第一皮带21转动,由于第一皮带21连接第一转轴293,第一皮带21带动第一转轴293转动,由于啮合块22啮合于第一转轴293,当第一转轴293在转动时,啮合块22将会向上移动,与此同时,第一转轴293的下方连接着小齿轮291的中心,在第一转轴293转动,小齿轮291更随着第一转轴293一起转动,转动的小齿轮291就会带动和小齿轮291啮合的大齿轮292,由于大齿轮292中心装有轴承,且大齿轮292的上表面固定连接有底板294,所以在大齿轮292转动时,同时,将会带动底板294上的机构一起进行转动,从而实现了焊接机构4中焊接条46位置的改变,能够调整焊接的位置。其次在当啮合块22开始向上移动时,啮合块22带动移动板23向上移动,由于一号限位槽25的底部和底板294固定连接,使得一号限位槽25直立于底板294上,而移动板23的两侧紧紧贴合一号限位槽25,移动板23在上移的过程中沿着一号限位槽25的导轨移动,而由于衔块24分别和移动板23、一号长杆27活动连接,导致在移动板23上移时,衔块24也随着移动板23一起向上移动,由于衔块24得另一端还活动连接着一号长杆27,使得衔块24在向上移动的过程中,将带动着一号长杆27一起向上移动,由于一号长杆27和横杆28通过第二活动销271相连,在一号长杆27向上移动时,推动横杆28绕着第一活动销26由上到下转动,从而可以实现横杆28将带动着焊接机构4由上到下运动,之后通过其它的机构的合力运作,将焊接机构4运行到合适的焊接操作区间,此时,打开第三电机41,通过第三电机41带动第三转轴43转动,此时由于第三转轴43外侧绕有第三皮带42,第三转轴43将带动第三皮带42转动,由于第三皮带42另一端绕有第三带轮44,第三皮带42将带动着第三带轮44转动,而第三带轮44中心处固定有中心轴47,所以第三带轮44将驱动中心处的中心轴47转动,而中心轴47连接下方的转盘45,带动转盘45进行转动,转盘45下方安装有焊接条46,在转盘45转动的过程中,使得焊接条46可以旋转到合适的位置,便于在焊接时,每一根焊条都能够进行焊接,可以快速的,持续的,稳定的进行焊接。
29.此外在第二电机54带动着移动块55沿着二号限位槽52进行水平移动时,就会带动摇摆杆31水平移动,从而就会带动着和摇摆杆31连接的竖杆32在竖直位置上的左右摆动,当摆动的幅度过大时,竖杆32将会拉动三脚旋架33绕着旋转轴331移动,在竖杆32向下移动时,三脚旋架33将绕着旋转轴331顺时针转动,此时,三脚旋架33的另一个的支角带动直杆
34沿着三脚旋架33旋转方向移动,焊接机构4在直杆34的带动下,焊接机构4将绕着转动销35进行转动。
30.最后在第一电机51将底板294转动到合适的位置时,此时打开第二电机54,通过第二电机54带动第二转轴53转动,由于第二转轴53啮合螺旋块56,螺旋块56固定连接移动块55的下端面,所以当第二电机54带动着第二转轴53转动,从而第二转轴53带动螺旋块56,进而螺旋块56推动移动块55两端沿着二号限位槽52的两端进行水平移动,此时移动块55上表面固定有固定块57,固定块57连接有活动轴59,二号长杆272穿过活动轴59连接固定块57两端,另外一号长杆27和二号长杆272之间通过连接杆58连接,且连接杆58和活动轴59连接,在一号长杆27向上移动时,带动着连接杆58向上上移,连接杆58就会绕着活动轴59进行转动,而活动轴59和一端的摇摆杆31相连,带动摇摆杆31绕着活动轴59转动,从而实现了拉伸机构3对焊接机构4的角度调整。
31.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施方式和说明书中的描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入本发明要求保护的范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1