自动拼焊设备的制作方法
1.本实用新型涉及激光焊接技术领域,特别涉及一种自动拼焊设备。
背景技术:
2.激光拼焊设备是特种加工专机,工作时需要将不同的板料通过人工或借助其它工具放置到激光拼焊夹具上,对板料进行两两拼接,然后再对板料进行激光焊接。
3.目前的激光拼焊设备一般是手动拼焊设备或者单工位自动拼焊设备。手动拼焊设备需要多名工人进行上下料及定位作业,不仅人工成本高,而且存在生产效率低、生产稳定性不好以及安全风险高等问题。单工位自动拼焊设备一个工作循环能拼焊的板料数较少,生产效率低,难以满足产能要求。因此,现有的激光拼焊设备无法满足对板料进行高效拼焊的生产需求。
技术实现要素:
4.鉴于上述现有技术的不足之处,本实用新型提供一种自动拼焊设备,可以有效地提高对板料的拼焊效率。
5.本实施例采取了以下技术方案:
6.一种自动拼焊设备,包括:
7.焊接主机,用于焊接第一板料和第二板料;
8.第一上料工位和第二上料工位,用于交替向所述焊接主机输送所述第一板料和所述第二板料;以及
9.下料机构,用于卸下焊接完成后的所述第一板料和所述第二板料;
10.其中,所述焊接主机包括第一上料方向、第二上料方向和下料方向,所述第一上料工位沿所述第一上料方向设置,所述第二上料工位沿所述第二上料方向设置,所述下料机构沿所述下料方向设置。
11.进一步的,所述的自动拼焊设备中,所述第一上料工位包括第一上料机构,所述第一上料机构包括第一料车和第一上料抓取组件,所述第一料车用于承载所述第一板料,所述第一上料抓取组件用于抓取所述第一板料至所述焊接主机,所述第一料车还用于沿所述第一上料方向往复运动。
12.进一步的,所述的自动拼焊设备中,所述第一上料机构还包括第二料车,所述第二料车用于承载所述第一板料,且所述第二料车用于与所述第一料车沿第一上料方向交替往复运动。
13.进一步的,所述的自动拼焊设备中,所述第一料车的高度高于第二料车的高度,且所述第一料车的下方形成供所述第二料车通过的通道。
14.进一步的,所述的自动拼焊设备中,所述第一上料工位还包括第二上料机构,所述第二上料机构包括第三料车和第二上料抓取组件,所述第三料车用于承载所述第二板料,所述第二上料抓取组件用于抓取所述第二板料至所述焊接主机,所述第三料车还用于沿所
述第一上料方向往复运动。
15.进一步的,所述的自动拼焊设备中,所述第一上料工位包括第一上料机构、第一定位机构、第二上料机构、第二定位机构和对中送料机构,所述对中送料机构包括第一取料端和第二取料端,所述第一上料机构、第一定位机构和第一取料端沿所述第一上料方向依次设置,所述第二上料机构、第二定位机构和第二取料端沿所述第一上料方向依次设置。
16.进一步的,所述的自动拼焊设备中,所述第一定位机构包括定位台,所述定位台上设置有第一定位组件和第二定位组件,所述第一定位组件用于定位所述第一板料的第一方向,所述第二定位组件用于定位所述第一板料的第二方向。
17.进一步的,所述的自动拼焊设备中,所述对中送料机构包括支撑臂、第一驱动模组、第一取料架、第二驱动模组和第二取料架,所述第一取料架用于抓取所述第一板料,所述第一驱动模组设置在所述支撑臂上,用于驱动所述第一取料架接近第一板料,所述第二取料架用于抓取所述第二板料,所述第二驱动模组设置在所述支撑臂上,用于驱动所述第二取料架接近第二板料。
18.进一步的,所述的自动拼焊设备中,所述第一驱动模组还用于驱动所述第一取料架沿板料拼接方向移动,所述第二驱动模组还用于驱动所述第二取料架沿板料拼接方向移动,所述板料拼接方向与所述第一送料方向垂直。
19.进一步的,所述的自动拼焊设备中,所述第一板料和所述第二板料的数量均设置为多个。
20.相较于现有技术,本实用新型提供的一种自动拼焊设备,可以通过第一上料工位和第二上料工位交替向焊接主机提供板料组件,减少焊接主机的焊接等待时间,使焊接主机可以不间断地进行焊接,从而提高设备的焊接效率。
附图说明
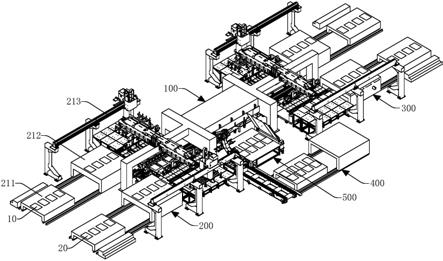
21.图1为本实用新型提供的自动拼焊设备中具体实施例的整体结构示意图。
22.图2为图1所示自动拼焊设备的俯视图。
23.图3为图1所示自动拼焊设备中上料抓取组件的结构示意图。
24.图4为图1所示自动拼焊设备中第一定位机构的俯视图。
25.图5为图4中a处的放大图。
26.图6为图1所示自动拼焊设备中对中送料机构的结构示意图。
27.图7为图1所示自动拼焊设备中对中焊接主机的结构示意图。
28.图8为图7所示焊接主机中焊接组件的结构示意图。
29.图9为图1所示焊接主机中焊接底座的结构示意图。
30.图10为图1所示自动拼焊设备中翻板机构的结构示意图。
31.其中,100、焊接主机;110、焊接底座;111、滑轨;112、第一滑台;113、第二滑台;114、板料定位组件;120、焊接组件;121、支撑架;122、焊接驱动模组;123、焊接头;130、防护外罩;
32.200、第一上料工位;210、第一上料机构;211、第一料车;212、第二料车;213、第一上料抓取组件;2131、支座;2132、上料驱动模组;2133、吸盘架;220、第一定位机构;221、定位台;222、第一定位组件;223、第二定位组件;230、第二上料机构;240、第二定位机构;250、
对中送料机构;251、支撑臂;252、第一驱动模组;253、第一取料架;254、第二驱动模组;255、第二取料架;
33.300、第二上料工位;
34.400、下料机构;410、下料机械手;420、下料料车;
35.500、翻板机构;510、翻转台;520、翻转板;530、翻转驱动组件;
36.10、第一板料;20、第二板料。
具体实施方式
37.为使本实用新型的目的、技术方案及效果更加清楚、明确,以下参照附图并举实施例对本实用新型进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型,在没有进一步叙述的情况下,一个实施方式中的元件、结构和特征也可以有益地结合到其他实施方式中。
38.请参阅图1和图2,本实用新型中的自动拼焊设备包括焊接主机100、第一上料工位200、第二上料工位300和下料机构400,第一上料工位200和第二上料工位300用于交替向焊接主机100输送板料组件,板料组件包括第一板料10和第二板料20,且焊接主机100包括多个上下料方向,如第一上料方向、第二上料方向和下料方向,第一上料工位200沿第一上料方向进行设置,第二上料工位300沿第二上料方向进行设置,下料机构400沿下料方向进行设置。
39.其中,焊接主机100可将板料组件中第一板料10和第二板料20拼焊在一起,形成所需的成品板料。本实施例中方向描述以图2所示的自动拼焊设备俯视图方向为准,可见第一上料工位200可设置在焊接主机100的左侧,从焊接主机100的左侧方向进行上料;第二上料工位300可设置在焊接主机100的右侧,从焊接主机100的右侧方向进行上料;下料机构400可设置在焊接主机100的前侧,从焊接主机100的前侧方向进行上料,各工位工作时不会相互干扰。
40.焊接前,第一上料工位200和第二上料工位300先进行取料,然后由第一上料工位200对焊接主机100上料;当第一上料工位200将板料组件送入焊接主机100后,第一上料工位200重新返回取料;焊接主机100焊接完毕后,由第二上料工位300对焊接主机100上料,并在上料完成后重新返回取料;焊机主机再次焊接完毕后,继续由第一上料工位200对焊接主机100上料,并重复上述步骤,使焊接主机100可进行不间断拼焊,减少焊接主机100的等待时间,提高焊接效率。
41.在具体的实施例中,以第一上料工位200为例,第一上料工位200包括第一上料机构210、第一定位机构220、第二上料机构230、第二定位机构240和对中送料机构250,对中送料机构250包括第一取料端和第二取料端,第一上料机构210、第一定位机构220和第一取料端沿焊机主机的第一上料方向依次设置,第二上料机构230、第二定位机构240和第二取料端也沿焊机主机的第一上料方向依次设置。
42.第一上料机构210、第一定位机构220和第二上料机构230、第二定位机构240可设置为焊机主机左侧方向上相对的两排,分别输送第一板料10和第二板料20。其中,第一上料机构210用于从取料处(可人工上料或自动上料)取得第一板料10,然后将第一板料10送入第一定位机构220进行定位,再由对中送料机构250通过第一取料端抓取第一板料10。同理,
第二送料机构和第二定位机构240用于对第二板料20进行取料和定位,再由对中送料机构250通过第二取料端抓取第二板料20。对中送料机构250抓取第一板料10和第二板料20后,沿板料拼接方向完成第一板料10和第二板料20的拼接,并送入焊接主机100完成第一板料10和第二板料20的焊接。
43.在具体的实施例中,对于第一上料机构210和第二上料机构230,以第一上料机构210为例,第一上料机构210包括第一料车211和第一上料抓取组件213,第一料车211用于承载第一板料10,第一上料抓取组件213用于抓取第一料车211上的第一板料10至第一定位机构220(最终到焊接主机100),同时第一料车211还用于沿第一上料方向往复运动。
44.其中,第一上料抓取组件213可以设置在第一定位机构220和第一料车211的侧方,方便其将第一板料10抓取至第一定位机构220。本实施例定义第一上料抓取组件213从第一料车211抓取板料的地点为上料点,第一料车211取料的地点为取料点。第一料车211沿第一上料方向往复运动,是指第一料车211从上料点和取料点进行往返运动,不断地将新的第一板料10从取料点送到上料点。
45.进一步的,第一上料机构210还包括第二料车212,第二料车212也用于承载第一板料10,第一上料抓取组件213还用于抓取所述第二料车212上的第一板料10至第一定位机构220(最终到焊接主机100),且所述第二料车212用于与第一料车211沿第一上料方向交替往复运动。
46.其中,第二料车212与第一料车211沿第一上料方向交替往复运动,是指第一料车211和第二料车212交替进行装料、上料过程,从而有效地提高上料速度,使第一上料抓取组件213可以不间断的抓取不同料车上的第一板料10至第一定位机构220。
47.更进一步的,请参阅图1,第一料车211的高度高于第二料车212的高度,且第一料车211的下方形成供第二料车212通过的通道。第二料车212去上料点上料或回取料点取料时,均可通过第一料车211下方的通道,使得第一料车211和第二料车212行驶时共用一条轨道,且相互间不会产生干扰。相比于第一料车211和第二料车212并排设置等方式,能够有效地节约空间,减少其占地面积。
48.请参阅图3,第一上料抓取组件213包括支座2131、上料驱动模组2132和吸盘架2133,上料驱动模组2132设置在支架上,吸盘架2133设置在上料驱动模组2132的驱动端,吸盘架2133上设置有多个吸盘,可以通过吸盘吸住板料。上料驱动模组2132选用三轴运动模组,使其可驱动吸盘架2133沿x轴方向、y轴方向和z轴方向(分别为图2所示的自动拼焊设备俯视图的左右方向、前后方向以及竖直方向)进行移动,使吸盘架2133准确落在第一板料10上,然后通过吸盘吸住第一板料10进行移动。
49.当然,在其它实施例中,第一上料抓取组件213也可以采用机械臂结合吸盘/夹爪或者其它方式实现对第一板料10的抓取,本实用新型对此不做限定。
50.与第一上料机构210同理,第二上料机构230也可设置第三料车、第四料车和第二上料抓取组件,并通过第三料车和第四料车沿第一上料方向交替运输第二板料20,再由第二上料抓取组件抓取第二板料20至第二定位机构240和对中送料机构250(最终送至焊接主机100),实现第二上料机构230的连续上料。或者,第二上料机构230也可采用与第一上料机构210不同的上料方式,本实用新型对此不做限定。
51.对于第一定位机构220和第二定位机构240,以第一定位机构220为例,请参阅图4
和图5,在具体的实施例中,第一定位机构220包括定位台221,定位台221上设置有第一定位组件222和第二定位组件223,第一定位组件222用于定位第一板料10的第一方向(本实施例中为前后方向),第二定位组件223用于定位第一板料10的第二方向(本实施例中为左右方向)。
52.第一定位组件222包括设置在定位台221上的前定位块,且前定位块位于第一板料10的前端,可以通过对中送料机构250驱动板料贴紧前定位块实现前后定位,或者也可以通过设置前定位驱动组件提供前定位的动力。
53.第二定位组件223包括设置在定位台221上的定位销以及侧定位驱动件,且定位销位于第一板料10的侧方。可以在前定位块上设置电磁铁,通过电磁铁将第一板料10吸紧在前定位块上,并使前定位块和电磁铁可沿定位台221移动(左右方向),然后通过侧定位驱动件(例如采用气缸)驱动前定位块和电磁铁移动,然后带动第一板料10移动并贴紧定位销实现左右定位,或者也可以直接通过侧定位驱动件驱动第一板料10移动并贴紧定位销。
54.并且,定位台221的台面可设置毛刷,通过毛刷起到对板料的支撑,可实现传动送料平稳,避免了板料摩擦、碰磕和划伤,且毛刷还有吸震减震功能,从而提高板料定位精度。
55.同理,第二定位机构240可采用与第一定位机构220相同的结构,实现对第二板料20的定位。或者也可以采用其它方向实现对第二板料20的定位,本实用新型对此不做限定。
56.请参阅图6,对中送料机构250包括支撑臂251、第一驱动模组252、第一取料架253、第二驱动模组254和第二取料架255,第一取料架253用于抓取第一板料10,第一驱动模组252设置在支撑臂251上,用于驱动第一取料架253接近第一板料10,第二取料架255用于抓取所述第二板料20,第二驱动模组254设置在支撑臂251上,用于驱动第二取料架255抓取第二板料20。
57.其中,第一驱动模组252还用于驱动第一取料架253沿板料拼接方向移动,且第二驱动模组254还用于驱动第二取料架255沿板料拼接方向移动,最终使第一取料架253和第二取料架255沿板料拼接方向相向移动。板料拼接方向(为图2所示的自动拼焊设备俯视图的前后方向)与第一送料方向(为图2所示的自动拼焊设备俯视图的左右方向)垂直,方便对中送料机构250将抓取的第一板料10和第二板料20进行对中拼接。
58.第一驱动模组252和第二驱动模组254均可选用三轴运动模组。第一取料架253和第二取料架255上均设置有吸盘,通过吸盘吸紧第一板料10和第二板料20。支撑臂251可沿板料拼接方向进行设置,第一取料架253和第二取料架255分别位于支撑臂251的两端,方便其对应第一定位机构220和第二定位机构240上的板料进行取料,然后使第一板料10和第二板料20沿拼接方向相向运动实现拼接。
59.对于第二上料工位300,其设置方式可与第一上料工位200的设置方式相同,或者也可采用其它方式进行第一板料10和第二板料20的上料,本实用新型对此不做限定。
60.请参阅图7和图8,焊接主机100包括焊接底座110、焊接组件120和防护外罩130,焊接底座110用于承载第一上料工位200和第二上料工位300送来的板料组件,焊接组件120用于对板料组件进行焊接,防护外罩130设置在焊接组件120上,且两端设置有升降组件,可在焊接过程中降下并遮盖焊接组件120,防止激光泄露。
61.在具体的实施例中,请继续参阅图9,焊接底座110包括滑轨111、第一滑台112和第二滑台113,焊接组件120位于滑轨111的上方,第一滑台112和第二滑台113可在滑轨111上
沿左右方向进行滑动,且第一滑台112用于接收滑轨111左端第一上料工位200送来的板料组件,第二滑台113用于接收滑轨111右端第二上料工位300送来的板料组件,然后第一滑台112和第二滑台113交替将板料组件送到滑轨111中部,由焊接组件120对板料组件进行焊接。
62.进一步的,滑轨111、第一滑台112和第二滑台113均包括两部分拼接组成,且两部分设置为沿左右方向中心线的前后两段。以第一滑台112为例,第一滑台112前部放置第二板料20,第一滑台112后部放置第一板料10,同时滑轨111的前部和后部之间设置有板料定位组件114,用于对第一板料10或第二板料20待焊接的侧边进行定位。
63.其中,板料定位组件114可包括升降组件(如升降气缸)和板料定位块,升降组件设置在滑轨111中部,板料定位块设置在升降组件的驱动端。对中送料机构250先将第一板料10的焊接边靠紧板料定位块完成定位,然后升降组件驱动板料定位块下降,对中送料机构250再将第二板料20的焊接边靠紧第一板料10的焊接边,完成板料的拼接。第一滑台112再将拼接后的板料送到焊接位置进行焊接,得到成品板料,并通过下料机构400进行下料。
64.并且,第一滑台112上还可设置压紧第一板料10和第二板料20的压紧组件或吸紧组件,使得拼接完成后的第一板料10和第二板料20不会在焊接过程中脱离焊接位置,提高焊接质量。第二滑台113的设置方式可与第一滑台112的设置方式相同,或者也可采用其它设置方式,本实用新型对此不做限定。
65.请继续参阅图7和图8,焊接组件120包括支撑架121、焊接驱动模组122和焊接头123。焊接驱动模组122设置在支撑架121上,同时对中送料机构250也可设置在支撑架121上,使结构更加紧凑。焊接头123设置在焊接驱动模组122的驱动端,通过焊接驱动模组122驱动焊接头123对准第一板料10和第二板料20进行焊接。焊接驱动模组122采用三轴驱动模组,且在驱动端还可设置焊缝跟踪传感器,提高焊接的精度。
66.为了进一步提高设备的拼焊效率,第一板料10和第二板料20的数量均设置为多个。可对第一上料工位200、第二上料工位300和焊接主机100进行相应设置,如增加料车承载面积、增加吸盘数量等。使第一上料工位200和第二上料工位300均可同时输送多组第一板料10和第二板料20,且焊接主机100可同时焊接多组第一板料10和第二板料20,进一步提高对板料的焊接效率。
67.通过下料机构400可将焊接完成后的板料从焊接主机100上卸除。请继续参阅图1和图2,下料机构400包括下料机械手410和下料料车420,下料机械手410上装有吸盘,可通过吸盘抓取板料放置到下料料车420上。下料料车420也可设置高料车和低料车,通过高料车和底料车交替送料,将拼焊后的成品板料输送到成品堆垛处。
68.此外,自动拼焊设备还可包括翻板机构500。当需要翻板板料进行堆垛或者送入下一加工工位时,可以通过翻板机构500翻转板料。在具体的实施例中,请参阅图10,所述翻板机构500包括翻转台510、翻转板520和翻转驱动组件530,翻转板520的一侧与翻转台510转动连接,翻转驱动组件530设置在翻转台510上,可驱动翻转板520转动,翻转板520上设置有吸盘,可通过吸盘吸住成品板料。
69.下料机械手410将成品板料放置在翻转台510上后,翻转驱动组件530驱动翻转板520旋转至翻转台510的台面,通过吸盘将产品板料吸住,然后翻转驱动组件530再驱动翻转板520向上旋转一定角度,此时下料机械手410再从成品板料的背面抓取板料并送到下料料
车420上,最终完成翻转堆垛。
70.此外,自动拼接设备还包括可辅机平台和操作台,辅机平台包括支撑台和位于支撑台上的压缩机、电源设备和控制设备等辅助设备。支撑台可设置在焊接主机100的上方,形成二层辅机平台,提高空间利用率,减少设备的占地面积。
71.同时,自动拼接设备还可包括围绕整个设备的围栏,防止人员接触工作中的设备,提高设备操作的安全性,保证设备不停机连续运行。同时操作台可设置在围栏外,方便操作人员操作。
72.可以理解的是,对本领域普通技术人员来说,可以根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,而所有这些改变或替换都应属于本实用新型所附的权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1