一种数控机床用机械手臂的制作方法
一种数控机床用机械手臂
【技术领域】
1.本实用新型涉及数控机床领域,具体涉及一种数控机床用机械手臂。
背景技术:
2.数控机床是数字控制机床的简称,是一种装有程序控制系统的自动化机床;现有的数控机床为单轴工作或主轴与副轴配合工作,数控机床上所用的冷却装置大部分为可弯曲固定的导管,通过导管喷出大量冷却液对加工部位和钻头进行冷却降温,如果是主轴与副轴配合工作的机床那就需要多个大功率的冷却装置才能满足降温需求,这样不仅浪费资源,而且时常需要人工调整冷却装置喷头的位置,比较麻烦。
3.为了克服上述的问题,我们研制了一种数控机床用机械手臂。
技术实现要素:
4.为了实现上述目的,本实用新型采用的技术方案:一种数控机床用机械手臂,它包括固定座、水平转轴、与水平转轴固定连接的旋转杆和旋转杆末端的喷嘴,
5.所述旋转杆包括第一旋转杆、第二旋转杆和第三旋转杆,所述第一旋转杆一端与水平转轴固定连接,另一端与第二旋转杆通过由第一伺服电机提供动力的转轴连接,所述第三旋转杆一端与第二旋转杆通过由第二伺服电机提供动力的转轴连接,另一端与喷嘴通过由第三伺服电机提供动力的转轴连接;
6.所述水平转轴与固定座通过由第四伺服电机提供动力的转轴连接;
7.所述固定座内设有控制中心和与输液管连接的液泵装置,所述控制中心与电源电性连接,所述液泵装置、第一伺服电机、第二伺服电机、第三伺服电机和第四伺服电机与控制中心电性连接;
8.所述喷嘴上设有红外感应装置,所述输液管一端与外置水箱连接,另一端与喷嘴连接。
9.于一个或多个实施案例中,所述第一旋转杆、第二旋转杆和第三旋转杆为中空结构,所述输液管置于旋转杆内。
10.于一个或多个实施案例中,所述第二旋转杆上设有第一避让感应装置,所述第三旋转杆上设有第二避让感应装置。
11.于一个或多个实施案例中,所述固定座上设有安装孔。
12.本实用新型同背景技术相比所产生的有益效果:
13.通过采用上述技术方案,本实用新型可以通过喷嘴上的红外感应装置对喷嘴朝向区域进行检测,当区域内有温度值高于红外感应装置预设值,即通过控制中心控制旋转杆对准高温区域喷射冷却液进行降温,当工作台上高温区域位置发生改变时,由红外感应装置进行感应追踪,控制中心控制旋转杆移动向改变位置的高温区进行降温。
【附图说明】
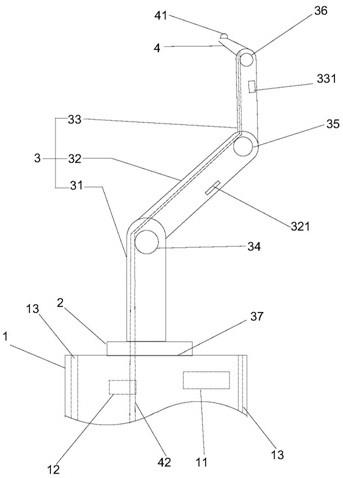
14.图1为本实用新型结构示意图。
【具体实施方式】
15.下面结合说明书的附图,通过对本实用新型的具体实施方式作进一步的描述,使本实用新型的技术方案及其有益效果更加清楚、明确。下面通过参考附图描述实施例是示例性的,旨在解释本实用新型,而不能理解为对本实用新型的限制。
16.请参看图1所示的,本实用新型提供一种数控机床用机械手臂,它包括固定座1、水平转轴2、与水平转轴2固定连接的旋转杆3和旋转杆3末端的喷嘴4,所述旋转杆3包括第一旋转杆31、第二旋转杆32和第三旋转杆33,所述第一旋转杆31一端与水平转轴2固定连接,另一端与第二旋转杆32通过由第一伺服电机34提供动力的转轴连接,所述第三旋转杆33一端与第二旋转杆32通过由第二伺服电机35提供动力的转轴连接,另一端与喷嘴4通过由第三伺服电机36提供动力的转轴连接;所述水平转轴2与固定座1通过由第四伺服电机37提供动力的转轴连接,第一伺服电机34控制第二旋转杆32的转动,第二伺服电机35控制第三旋转杆33的转动,第三伺服电机36控制喷嘴4的转动,第四伺服电机37控制水平转轴2的转动;所述固定座1内设有控制中心11和与输液管42连接的液泵装置12,通过液泵装置12将冷却液泵到喷嘴4,所述控制中心11与电源电性连接,所述液泵装置12、第一伺服电机34、第二伺服电机35、第三伺服电机36和第四伺服电机37与控制中心11电性连接,控制中心11控制液泵装置1的功率及旋转杆3的转动;所述喷嘴4上设有红外感应装置41,所述输液管42一端与外置水箱连接,另一端与喷嘴4连接,当红外感应装置41感应到喷嘴4对应区域出现温度值高于预设值时,即向控制中心11发送电信号,控制中心11控制旋转杆3转动对准高温区同时控制液泵装置12泵出冷却液。第一旋转杆31、第二旋转杆32和第三旋转杆33为中空结构,所述输液管42置于旋转杆内。第二旋转杆32上设有第一避让感应装置321,所述第三旋转杆33上设有第二避让感应装置331,当第一避让感应装置321或第二避让感应装置331感应到有障碍物距离过近时,即向控制中心11发送电信号,控制中心11控制第二旋转杆32或第三旋转杆33远离障碍物,与障碍物保持安全距离。固定座1上设有安装孔13,方便将冷却装置安装到数控机床上。
17.使用时,将冷却装置通过安装孔13固定在数控机床上,连接电源,启动数控机床开始运行,当红外感应装置41感应到喷嘴4对应区域出现温度值高于预设值时,即向控制中心11发送电信号,控制中心11控制旋转杆转动对准高温区同时控制液泵装置12泵出冷却液,当工作台上高温区域位置发生改变时,由红外感应装置41进行感应追踪,控制中心11控制旋转杆3移动向改变位置的高温区进行降温;在工作台进行移动时,当第一避让感应装置321或第二避让感应装置331感应到有障碍物距离过近时,即向控制中心11发送电信号,控制中心11控制第二旋转杆32或第三旋转杆33远离障碍物,与障碍物保持安全距离。
18.在说明书的描述中,参考术语“合一个实施例”、“优选地”、“示例”、“具体示例”或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点,包含于本实用新型的至少一个实施例或示例中,在本说明书中对于上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或者示例中以合适方式结合。
19.通过上述的结构和原理的描述,所属技术领域的技术人员应当理解,本实用新型不局限于上述的具体实施方式,在本实用新型基础上采用本领域公知技术的改进和替代均落在本实用新型的保护范围,应由各权利要求限定之。
技术特征:
1.一种数控机床用机械手臂,它包括固定座(1)、水平转轴(2)、与水平转轴(2)固定连接的旋转杆(3)和旋转杆(3)末端的喷嘴(4),其特征在于,所述旋转杆(3)包括第一旋转杆(31)、第二旋转杆(32)和第三旋转杆(33),所述第一旋转杆(31)一端与水平转轴(2)固定连接,另一端与第二旋转杆(32)通过由第一伺服电机(34)提供动力的转轴连接,所述第三旋转杆(33)一端与第二旋转杆(32)通过由第二伺服电机(35)提供动力的转轴连接,另一端与喷嘴(4)通过由第三伺服电机(36)提供动力的转轴连接;所述水平转轴(2)与固定座(1)通过由第四伺服电机(37)提供动力的转轴连接;所述固定座(1)内设有控制中心(11)和与输液管(42)连接的液泵装置(12),所述控制中心(11)与电源电性连接,所述液泵装置(12)、第一伺服电机(34)、第二伺服电机(35)、第三伺服电机(36)和第四伺服电机(37)与控制中心(11)电性连接;所述喷嘴(4)上设有红外感应装置(41),所述输液管(42)一端与外置水箱连接,另一端与喷嘴(4)连接。2.根据权利要求1所述的数控机床用机械手臂,其特征在于:所述第一旋转杆(31)、第二旋转杆(32)和第三旋转杆(33)为中空结构,所述输液管(42)置于旋转杆内。3.根据权利要求1所述的数控机床用机械手臂,其特征在于:所述第二旋转杆(32)上设有第一避让感应装置(321),所述第三旋转杆(33)上设有第二避让感应装置(331)。4.根据权利要求1所述的数控机床用机械手臂,其特征在于:所述固定座(1)上设有安装孔(13)。
技术总结
本实用新型公开了一种数控机床用机械手臂,它包括固定座、水平转轴、与水平转轴固定连接的旋转杆和旋转杆末端的喷嘴,所述旋转杆包括第一旋转杆、第二旋转杆和第三旋转杆,所述第一旋转杆一端与水平转轴固定连接,另一端与第二旋转杆通过由第一伺服电机提供动力的转轴连接,所述第三旋转杆一端与第二旋转杆通过由第二伺服电机提供动力的转轴连接,另一端与喷嘴通过由第三伺服电机提供动力的转轴连接;本实用新型可以通过喷嘴上的红外感应装置对喷嘴朝向区域进行检测,当区域内有温度值高于红外感应装置预设值,即通过控制中心控制旋转杆对准高温区域喷射冷却液进行降温。杆对准高温区域喷射冷却液进行降温。杆对准高温区域喷射冷却液进行降温。
技术研发人员:刘伙培
受保护的技术使用者:佛山市顺德区精之镱数控设备有限公司
技术研发日:2021.07.29
技术公布日:2022/3/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1