一种便于切换的碳化硅芯片封装用焊接设备的制作方法
1.本实用新型涉及芯片焊接设备技术领域,具体地说,涉及一种便于切换的碳化硅芯片封装用焊接设备。
背景技术:
2.目前,在碳化硅芯片焊接到fpc柔性线路板的生产制造过程中,大尺寸芯片是用人工手动放置并焊接点胶,并且传统焊接装置上的定位结构多采用导轨滑轮移动控制焊接头位置,因此只能控制焊接头在单一平面上进行移动,工作空间有限。
技术实现要素:
3.为了解决上述现有技术的不足之处,本实用新型的目的在于提供一种便于切换的碳化硅芯片封装用焊接设备,以克服现有技术中的缺陷。
4.为了实现上述目的,本实用新型提供了一种便于切换的碳化硅芯片封装用焊接设备,包括底座,底座上设置有工作台,工作台的一侧连接有三轴机械臂,三轴机械臂的端部连接有焊接器,以使焊接器在工作台上方任意位置进行移动;其中,工作台通过支撑柱设立在底座上,工作台上开设有两道滑槽,两道滑槽的两端相对地插设有两个定位板,定位板的底部连接有竖向气缸,以使定位板上下移动,竖向气缸的底部连接有横向气缸,以使定位板沿着滑槽移动。
5.通过上述技术方案,通过三轴机械臂实现焊接器在工作台上方任意位置进行移动,以及通过两个定位板将基板固定在工作台上,并且可以通过竖向气缸和横向气缸来调节定位板,方便定位板切换固定不同尺寸和厚度的基板,使芯片在焊接过程中不会发生偏移,具有良好的稳定性。
6.作为对本实用新型所述的便于切换的碳化硅芯片封装用焊接设备的进一步说明,优选地,三轴机械臂包括固定连接在底座上的支撑杆,支撑杆上连接有转动臂,转动臂通过第一转轴连接有一级伸展臂,一级伸展臂通过第二转轴连接有二级伸展臂,二级伸展臂的端部连接有万向球接头,万向球接头上连接有第一夹持部,焊接器固定连接在第一夹持部内。
7.通过上述技术方案,焊接器固定连接在第一夹持部内,方便焊接操作,第一夹持部连接在万向球接头上方便调整焊接器的焊接方向,并且三轴机械臂的转动臂/一级伸展臂和二级伸展臂实现了焊接器在三维空间内的移动。
8.作为对本实用新型所述的便于切换的碳化硅芯片封装用焊接设备的进一步说明,优选地,转动臂上通过转轴连接有横杆,横杆的端部连接有第二夹持部,用于放置焊接器。
9.通过上述技术方案,在完成焊接后可以将焊接器放置在第二夹持部内,便于收纳。
10.作为对本实用新型所述的便于切换的碳化硅芯片封装用焊接设备的进一步说明,优选地,定位板的内侧面上具有弹性材料。
11.通过上述技术方案,定位板的内侧面的弹性材料与基材接触,避免对基材固定过
程中压坏基材。
12.作为对本实用新型所述的便于切换的碳化硅芯片封装用焊接设备的进一步说明,优选地,竖向气缸限位在底座上的滑道内。
13.通过上述技术方案,竖向气缸限位在底座上的滑道内保证了定位板在滑槽内的移动。
14.本实用新型的有益效果:本实用新型通过三轴机械臂实现焊接器在工作台上方任意位置进行移动,以及通过两个定位板将基板固定在工作台上,并且可以通过竖向气缸和横向气缸来调节定位板,方便定位板切换固定不同尺寸和厚度的基板,使芯片在焊接过程中不会发生偏移,具有良好的稳定性。
附图说明
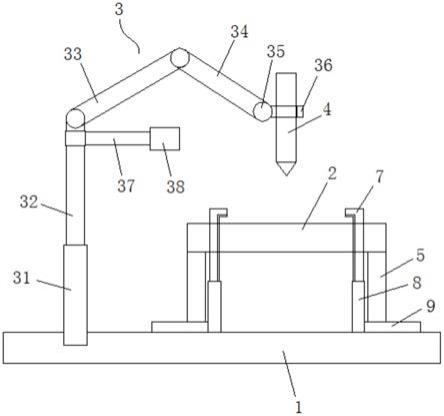
15.图1为本实用新型的便于切换的碳化硅芯片封装用焊接设备的结构示意图;
16.图2为本实用新型的焊接器与三轴机械臂的使用状态示意图;
17.图3为本实用新型的定位板插设在工作台上的结构示意图。
具体实施方式
18.为了能够进一步了解本实用新型的结构、特征及其他目的,现结合所附较佳实施例附以附图详细说明如下,本附图所说明的实施例仅用于说明本实用新型的技术方案,并非限定本实用新型。
19.如图1所示,图1为本实用新型的便于切换的碳化硅芯片封装用焊接设备的结构示意图;一种便于切换的碳化硅芯片封装用焊接设备包括底座1,底座1上设置有工作台2,工作台2的一侧连接有三轴机械臂3,三轴机械臂3的端部连接有焊接器4,以使焊接器4在工作台2上方任意位置进行移动;其中,工作台2通过支撑柱5设立在底座1上,工作台2上开设有两道滑槽6,两道滑槽6的两端相对地插设有两个定位板7,定位板7的底部连接有竖向气缸8,以使定位板7上下移动,竖向气缸8的底部连接有横向气缸9,以使定位板7沿着滑槽6移动。通过三轴机械臂实现焊接器在工作台上方任意位置进行移动,以及通过两个定位板将基板固定在工作台上,并且可以通过竖向气缸和横向气缸来调节定位板,方便定位板切换固定不同尺寸和厚度的基板,使芯片在焊接过程中不会发生偏移,具有良好的稳定性。
20.如图1所示,三轴机械臂3包括固定连接在底座1上的支撑杆31,支撑杆31上连接有转动臂32,转动臂32通过第一转轴连接有一级伸展臂33,一级伸展臂33通过第二转轴连接有二级伸展臂34,二级伸展臂34的端部连接有万向球接头35,万向球接头35上连接有第一夹持部36,焊接器4固定连接在第一夹持部36内。焊接器固定连接在第一夹持部内,方便焊接操作,第一夹持部连接在万向球接头上方便调整焊接器的焊接方向,并且三轴机械臂的转动臂/一级伸展臂和二级伸展臂实现了焊接器在三维空间内的移动。
21.如图2所示,转动臂32上通过转轴连接有横杆37,横杆37的端部连接有第二夹持部38。在完成焊接后可以将焊接器放置在第二夹持部内,便于收纳。
22.如图3所示,定位板7的内侧面上具有弹性材料10。定位板的内侧面的弹性材料与基材接触,避免对基材固定过程中压坏基材。
23.另外,设置竖向气缸8限位在底座1上的滑道内,保证了定位板在滑槽内的移动。三
轴机械臂3可以人工操作使用,也可以通过控制器控制实现焊接器4的精准移动。竖向气缸8和横向气缸9可以通过控制器控制并根据基材的尺寸和厚度实现自动调整定位板来固定基材,
24.需要声明的是,上述实用新型内容及具体实施方式意在证明本实用新型所提供技术方案的实际应用,不应解释为对本实用新型保护范围的限定。本领域技术人员在本实用新型的精神和原理内,当可作各种修改、等同替换或改进。本实用新型的保护范围以所附权利要求书为准。
技术特征:
1.一种便于切换的碳化硅芯片封装用焊接设备,其特征在于,包括底座(1),底座(1)上设置有工作台(2),工作台(2)的一侧连接有三轴机械臂(3),三轴机械臂(3)的端部连接有焊接器(4),以使焊接器(4)在工作台(2)上方任意位置进行移动;其中,工作台(2)通过支撑柱(5)设立在底座(1)上,工作台(2)上开设有两道滑槽(6),两道滑槽(6)的两端相对地插设有两个定位板(7),定位板(7)的底部连接有竖向气缸(8),以使定位板(7)上下移动,竖向气缸(8)的底部连接有横向气缸(9),以使定位板(7)沿着滑槽(6)移动。2.如权利要求1所述的便于切换的碳化硅芯片封装用焊接设备,其特征在于,三轴机械臂(3)包括固定连接在底座(1)上的支撑杆(31),支撑杆(31)上连接有转动臂(32),转动臂(32)通过第一转轴连接有一级伸展臂(33),一级伸展臂(33)通过第二转轴连接有二级伸展臂(34),二级伸展臂(34)的端部连接有万向球接头(35),万向球接头(35)上连接有第一夹持部(36),焊接器(4)固定连接在第一夹持部(36)内。3.如权利要求2所述的便于切换的碳化硅芯片封装用焊接设备,其特征在于,转动臂(32)上通过转轴连接有横杆(37),横杆(37)的端部连接有第二夹持部(38),用于放置焊接器(4)。4.如权利要求1所述的便于切换的碳化硅芯片封装用焊接设备,其特征在于,定位板(7)的内侧面上具有弹性材料(10)。5.如权利要求1所述的便于切换的碳化硅芯片封装用焊接设备,其特征在于,竖向气缸(8)限位在底座(1)上的滑道内。
技术总结
本实用新型提供了一种便于切换的碳化硅芯片封装用焊接设备,包括底座,底座上设置有工作台,工作台的一侧连接有三轴机械臂,三轴机械臂的端部连接有焊接器,工作台通过支撑柱设立在底座上,工作台上开设有两道滑槽,两道滑槽的两端相对地插设有两个定位板,定位板的底部连接有竖向气缸,竖向气缸的底部连接有横向气缸。本实用新型通过三轴机械臂实现焊接器在工作台上方任意位置进行移动,以及通过两个定位板将基板固定在工作台上,并且可以通过竖向气缸和横向气缸来调节定位板,方便定位板切换固定不同尺寸和厚度的基板,使芯片在焊接过程中不会发生偏移,具有良好的稳定性。具有良好的稳定性。具有良好的稳定性。
技术研发人员:张培宗 郑小芳 林松乐 吴阳明 柯跃前
受保护的技术使用者:泉州中侨(集团)股份有限公司半导体器件厂
技术研发日:2021.08.13
技术公布日:2022/1/14
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1