一种自动上下料油汀片激光焊接站的制作方法
1.本实用新型涉及油汀片焊接技术领域,特别涉及一种自动上下料油汀片激光焊接站。
背景技术:
2.油汀片的焊接工作是将油汀片a工件和油汀片b工件焊接成油汀片组,此前在对油汀片组进行焊接时,是由人工手动分别投件,然后使用电阻焊接的方式,将油汀片a工件和油汀片b工件焊接在一起,此操作工作效率低,劳动强度大,并且由于长时间人工上料可能出现投料顺序的错误,导致出现产品报废的情况,另外由于是电阻焊接,产品的热变形浪大,影响产品美观。
技术实现要素:
3.本实用新型的就在于为了解决上述油汀片组进行焊接时,是由人工手动分别投件,然后使用电阻焊接的方式,将油汀片a工件和油汀片b工件焊接在一起,此操作工作效率低,劳动强度大,并且由于长时间人工上料可能出现投料顺序的错误,导致出现产品报废的情况,另外由于是电阻焊接,产品的热变形浪大,影响产品美观的问题而提供一种自动上下料油汀片激光焊接站。
4.为实现上述目的,本实用新型采取的技术方案为:
5.一种自动上下料油汀片激光焊接站,包括焊接机台、物料输送链装置、油汀片a、油汀片b、油汀片a工件送料小车、油汀片b工件送料小车、成品物料盘,位于所述焊接机台的两侧分别放置有物料自动上料机架与成品自动下料机架,所述油汀片a工件送料小车、油汀片b工件送料小车放置在物料自动上料机架的下方,所述成品物料盘放置在成品自动下料机架的下方,所述物料自动上料机架、焊接机台、成品自动下料机架上分别设置有一号三轴直线模组、二号三轴直线模组、三号三轴直线模组与四号三轴直线模组,所述物料输送链装置位于物料自动上料机架、成品自动下料机架、焊接机台上的下方,且物料输送链装置还位于油汀片a工件送料小车、油汀片b工件送料小车、成品物料盘的上方,所述油汀片a工件送料小车用于放置油汀片a,所述油汀片b工件送料小车用于放置油汀片b,所述成品物料盘用于放置焊接后的成品,所述物料输送链装置用于驱动油汀片a、油汀片b、成品做位置移动,所述一号三轴直线模组、二号三轴直线模组、三号三轴直线模组与四号三轴直线模组用于带动加工材料进行位置转移。
6.优选的,所述一号三轴直线模组a包括x轴丝杆模组、y轴丝杆模组、z轴丝杆模组、真空双吸盘、吸盘支架,所述y轴丝杆模组沿着x轴丝杆模组的设置方向做往复运动,所述z轴丝杆模组沿着y轴丝杆模组的设置方向做往复运动,所述真空双吸盘通过吸盘支架沿着z轴丝杆模组的设置方向做往复运动,所述二号三轴直线模组、三号三轴直线模组、四号三轴直线模组与一号三轴直线模组的结构相同。
7.优选的,所述真空双吸盘通过接管与真空设备连接,所述真空双吸盘用于吸附加
工材料。
8.优选的,所述物料输送链装置包括同步带输送机、输送机安装支腿、钣件投料治具,所述同步带输送机上安装有钣件投料治具,所述同步带输送机通过伺服电缸驱动。
9.优选的,所述焊接机台上还设置有一工位焊接机构与二工位焊接机构,所述一工位焊接机构与二工位焊接机构的结构相同,所述一工位焊接机构包括投件治具、前限位夹紧缸、右限位夹紧缸、上压紧板、上压紧气缸、移动安装板、轴承、导轴、前后推拉缸、滑轨组件。
10.优选的,所述前后推拉缸的驱动端与上压紧气缸连接,所述上压紧气缸与移动安装板安装,所述上压紧板通过导轴活动安插在移动安装板上,所述前后推拉缸通过上压紧气缸带动上压紧板做横向的往复运动,所述上压紧气缸的驱动端与上压紧板连接,所述上压紧气缸用于带动上压紧板做竖直方向的往复运动,所述移动安装板还通过滑轨组件与投件治具滑动安装,所述投件治具用于油汀片a与油汀片b的叠加放置。
11.优选的,所述焊接机台上还设置有焊接机械手,所述焊接机械手上安装有激光焊接头。
12.与现有技术相比,本实用新型具有如下有益效果:
13.自动上下料油汀片激光焊接站使用自动上料下料焊接的方式,提高了工作效率,降低了人工劳动强度,避免出现投料的顺序出错的情况,与激光焊接配合,降低了焊接时的热变形量,提高了产品外观质感。
附图说明
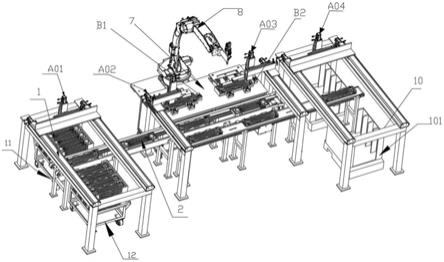
14.图1为本实用新型整体结构示意图;
15.图2为本实用新型油汀片a工件送料小车的后视图;
16.图3为本实用新型一号三轴直线模组的结构示意图;
17.图4为本实用新型的局部放大图;
18.图5为本实用新型的物料输送链装置的结构示意图;
19.图6为本实用新型一工位焊接机构的结构示意图;
20.图7为本实用新型油汀片a与油汀片b的示意图;
21.图8为本实用新型油汀片组的示意图;
22.图9为本实用新型的作业流程图。
23.图中:1、物料自动上料机架;2、物料输送链装置;7、焊接机台;8、焊接机械手;10、成品自动下料机架;11、油汀片a工件送料小车;12、油汀片b工件送料小车;101、成品物料盘;b1、一工位焊接机构;b2、二工位焊接机构;a01、一号三轴直线模组;a02、二号三轴直线模组;a03、三号三轴直线模组;a04、四号三轴直线模组;32、x轴丝杆模组;33、y轴丝杆模组;34、z轴丝杆模组;35、真空双吸盘;21、同步带输送机;22、输送机安装支腿;23、钣件投料治具;51、投件治具;52、前限位夹紧缸;53、右限位夹紧缸;54、上压紧板;55、上压紧气缸;56、移动安装板;57、轴承;58、导轴;59、前后推拉缸;510、滑轨组件。
具体实施方式
24.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面
结合具体实施方式,进一步阐述本实用新型。
25.如图1、图7所示,一种自动上下料油汀片激光焊接站,包括焊接机台7、物料输送链装置2、油汀片a、油汀片b、油汀片a工件送料小车11、油汀片b工件送料小车12、成品物料盘101,位于焊接机台7的两侧分别放置有物料自动上料机架1与成品自动下料机架10,油汀片a工件送料小车11、油汀片b工件送料小车12放置在物料自动上料机架1的下方,成品物料盘101放置在成品自动下料机架10的下方,物料自动上料机架1、焊接机台7、成品自动下料机架10上分别设置有一号三轴直线模组a01、二号三轴直线模组a02、三号三轴直线模组a03与四号三轴直线模组a04,四个三轴直线模组有各自对应的编码器,编码器可采集或测量各自对应的三轴直线模组的升降位移信号,同时四个三轴直线模组还有各自对应的传感器,传感器用于获取油汀片的距离数据,物料输送链装置2位于物料自动上料机架1、成品自动下料机架10、焊接机台7上的下方,且物料输送链装置2还位于油汀片a工件送料小车11、油汀片b工件送料小车12、成品物料盘101的上方,成品物料盘101的数量为两个分别放置在成品输送链9的两侧下方,油汀片a工件送料小车11用于放置油汀片a,油汀片b工件送料小车12用于放置油汀片b,成品物料盘101用于放置焊接后的成品,物料输送链装置2用于驱动油汀片a、油汀片b、成品做位置移动,一号三轴直线模组a01、二号三轴直线模组a02、三号三轴直线模组a03与四号三轴直线模组a04用于带动加工材料进行位置转移;
26.具体实施时,位于物料自动上料机架1上的一号三轴直线模组a01按照预先设置的程序对油汀片a工件送料小车11上的油汀片a进行取件,一号三轴直线模组a01在取件完成后向物料输送链装置2处移动,到达位置后将油汀片a放置在物料输送链装置2上,接着由物料输送链装置2将油汀片a输送至焊接机台7上靠近最右侧的三号三轴直线模组a03对应的位置处,与此同时,一号三轴直线模组a01移动至油汀片b工件送料小车12的上方位置处,进一步对油汀片b进行取件并将油汀片b也放置在物料输送链装置2上,油汀片b与油汀片a均在物料输送连装置2上由其进行输送,一号三轴直线模组在完成油汀片b的取件与放件后再次移动对油汀片a工件送料小车11上的油汀片a进行取件,如此反复运行,从而保证物料输送链装置2上的油汀片成abab的形式排列,三号三轴直线模组a03向物料输送链装置2位置处移动,当三号三轴直线模组a03移动至输送链装置2的上方位置处时,三号三轴直线模组a03对油汀片a进行取件并进行位置转移;
27.其中,一号三轴直线模组a01获取油汀片的作业流程是,先获取位于油汀片a工件送料小车11上第一列最上方的油汀片a,再获取位于油汀片b工件送料小车12上第一列最上方的油汀片b,接着再次获取位于油汀片a工件送料小车11上第一列最上方的油汀片a,如此反复,直至油汀片a工件送料小车11与油汀片b工件送料小车12上第一列的油汀片被获取完为止,这时,一号三轴直线模组a01再依次获取位于油汀片a工件送料小车11、油汀片b工件送料小车12上第二列的油汀片,四号三轴直线模组同理,先将成品放置在成品物料盘101的第一列位置处,叠加放满时,再将成品放置在第二列依次类推;
28.如图1、图3所示,一号三轴直线模组a01包括x轴丝杆模组32、y轴丝杆模组33、z轴丝杆模组34、真空双吸盘35、吸盘支架,y轴丝杆模组33沿着x轴丝杆模组32的设置方向做往复运动,z轴丝杆模组34沿着y轴丝杆模组33的设置方向做往复运动,真空双吸盘35通过吸盘支架沿着z轴丝杆模组34的设置方向做往复运动,二号三轴直线模组a02、三号三轴直线模组a03、四号三轴直线模组a04与一号三轴直线模组a01的结构相同,真空双吸盘35通过接
管与真空设备连接,真空双吸盘35用于吸附加工材料;
29.具体实施时,一号三轴直线模组a01通过x轴丝杆模组32移动至油汀片a的上方,在通过y轴丝杆模组33横向调节位置,接着通过z轴丝杆模组34向着下方的油汀片a移动,最后通过真空双吸盘35对油汀片a进行吸附,吸附后一号三轴直线模组a01重新调整位置至物料输送链装置2的上方,一号三轴直线模组a01再通过z轴丝杆模组34向物料输送链装置2靠近时停止对油汀片a的吸附,从而使得油汀片a放置在物料输送链装置2上,其他的三轴直线模组同理;
30.如图1、图5所示,物料输送链装置2包括同步带输送机21、输送机安装支腿22、钣件投料治具23,同步带输送机21安装在输送机安装支腿22上,同步带输送机21上安装有钣件投料治具23,钣件投料治具23用于油汀片a与油汀片b的放置,同步带输送机21通过伺服电缸驱动,从而实现对油汀片a与油汀片b的位置移动;
31.如图1、图6所示,焊接机台7上还设置有一工位焊接机构b1与二工位焊接机构b2,一工位焊接机构b1与二工位焊接机构b2的结构相同,一工位焊接机构b1包括投件治具51、前限位夹紧缸52、右限位夹紧缸53、上压紧板54、上压紧气缸55、移动安装板56、轴承57、导轴58、前后推拉缸59、滑轨组件510,前后推拉缸59的驱动端与上压紧气缸55连接,上压紧气缸55与移动安装板56安装,上压紧板54通过导轴58活动安插在移动安装板56上,前后推拉缸59通过上压紧气缸55带动上压紧板54做横向的往复运动,上压紧气缸55的驱动端与上压紧板54连接,上压紧气缸55用于带动上压紧板54做竖直方向的往复运动,移动安装板56还通过滑轨组件510与投件治具51滑动安装,投件治具51用于油汀片a11与油汀片b12的叠加放置;
32.具体实施时,三号工位三轴机械手a03依次将油汀片a工件和油汀片b工件投放到二工位焊接机构b2的投件治具51上,然后二工位焊接机构b2执行油汀片的限定作业,首先前限位夹紧缸52和右限位夹紧缸53分别夹紧工件,随后前后推拉缸59收缩将上压紧板54、上压紧气缸55、移动安装板56、轴承57、导轴58沿着滑轨组件510方向移动至压紧位正上方,最后,上压紧气缸55收紧将上压紧板54沿着轴承57、导轴58方向压紧钣件,此件即可进行焊接,焊接完成后由二工位焊接机构b2解除对油汀片的限定效果,三工位三轴机械手a03将焊接成品吸取至成品输送链上,一工位焊接机构b1工作原理与二工位焊接机构b2相同;
33.如图1所示,焊接机台7上还设置有焊接机械手8,焊接机械手8按照数控编程器的预设数控数据执行工作,焊接机械手8上安装有激光焊接头,焊接机械手8在移动时通过末端的激光焊接头实现对油汀片各个位置的焊接。
34.该自动上下料油汀片激光焊接站在使用时,物料输送链装置2位于物料自动上料机架1的下方位置处,以物料输送链装置2为分界线,将油汀片a工件送料小车11、油汀片b工件送料小车12分别推送在物料输送链装置2的两侧下方,由一号三轴直线模组a01先移动至油汀片a工件送料小车11的位置处,通过真空双吸盘35完成油汀片a的吸附后,再移动至物料输送链装置2位置处,将油汀片a放置在物料输送链装置2上,此时由物料输送链装置2带动油汀片a向右做位置移动,与此同时,一号三轴直线模组a01移动至油汀片b工件送料小车12的位置处完成对油汀片b的获取,同样的将油汀片b放置在物料输送链装置2上由其带动,如此反复,使得物料输送链装置2上的油汀片呈ababab...的形式排列,当物料输送链装置2上的第一个油汀片a移动至三号三轴直线模组对应的位置处时,由三轴直线模组a03移动至
第一个油汀片a的上方对第一个油汀片a进行吸附,吸附完成后再将第一个油汀片a放置在二工位焊接机构b2上,完成后一号三轴直线模组a01再次移动对第一个油汀片b进行获取,之后再将第一个油汀片b放置在第一个油汀片a上,此时由二工位焊接机构b2对两个油汀片进行夹持固定,由焊接机械手8利用激光焊接头对两个油汀片进行焊接,焊接完成后形成成品,二工位焊接机构b2解除对成品的固定,由三号三轴直线模组a03将成品放回至物料输送链装置2上,当成品移动至四号三轴直线模组a04对应位置时,由四号三轴直线模组a04移动至成品的上方,对成品进行吸附,之后再将成品放入至成品物料盘101上,二号三轴直线模组a02的作业流程与三号三轴直线模组a03相同,二号三轴直线模组a02通过吸附将油汀片放置在一工位焊接机构b1上,一工位焊接机构b1、二工位焊接机构b2分别位于焊接机械手8的左右两侧,焊接机械手8的作业流程是,二工位焊接机构b2上油汀片的焊接、一工位焊接机构b1上油汀片的焊接、二工位焊接机构b2上油汀片的焊接如此反复工作,焊接完成后的成品即油汀片组件(如图8)所示,统一由四号三轴直线模组a04进行吸附放置。
35.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
36.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1