一种全自动铆接机的控制系统的制作方法
1.本技术涉及铆接机的领域,尤其是涉及一种全自动铆接机的控制系统。
背景技术:
2.全自动铆接机是一种依据冷辗原理将两个或两个以上的工件通过冲压机压合在一起的设备。
3.目前,相关技术公开一种全自动铆接机,包括工作台、圆盘和电机,电机固定安装于工作台的顶面,圆盘与电机的旋转轴同轴连接。圆盘远离工作台的一面固定安装有多个放置台,沿圆盘的周向由上游工序至下游工序依次设置有第一夹持机构、第二夹持机构、冲压机构和卸料机构。电机带动圆盘转动,从而使每个放置台依次经过第一夹持机构、第二夹持机构、冲压机构和卸料机构。第一夹持机构和第二夹持机构将工件放入放置台,冲压机构对放置台上的工件进行冲压,卸料机构将放置台上的工件取出回收。
4.针对上述中的相关技术,发明人认为第一夹持机构和第二夹持机构在将工件夹起放入放置台过程中,第一夹持机构和第二夹持机构晃动,或未夹到工件,而电机继续带动圆盘转动,从而导致放置台上缺少工件直接进入冲压机构。冲压机构对放置台上的工件进行冲压,若放置台上缺少工件,从而容易生产出不合格的产品。
技术实现要素:
5.为了降低铆接机生产出不合格的产品的情况出现,本技术提供一种全自动铆接机的控制系统。
6.本技术提供的一种全自动铆接机的控制系统,采用如下的技术方案:
7.一种全自动铆接机的控制系统,其特征在于:包括第一检测模块、第二检测模块、第一控制模块、第二控制模块和电机,所述第一检测模块用于检测位于第一夹持机构和第二夹持机构位置的放置台上是否有放入工件,并启闭第一控制模块,所述第一控制模块用于启闭电机和第二检测模块,所述第二检测模块用于检测圆盘转动的角度,并启闭第二控制模块,所述第一检测模块的第一电源端与第一电源vcc1的正极连接,所述第一检测模块的第二电源端和第一控制模块的第一电源端均与第二电源vcc2的正极连接,所述第一检测模块的输出端、第一控制模块的第一输出端和第二控制模块的第一电源端相互连接,所述第一控制模块的第二电源端与第三电源vcc3的正极连接,所述第一控制模块的输入端与第二控制模块的输出端连接,所述第一控制模块的第二输出端连接于第二控制模块的第二电源端、电机的一端和第二检测模块的电源端,所述第二检测模块的输出端连接于第二控制模块的输入端,所述第一检测模块的接地端、第二检测模块的接地端、第一控制模块的接地端、第二控制模块的接地端和电机的一端均与电源地连接。
8.通过采用上述技术方案,启动第一检测模块,在第一夹持机构和第二夹持机构均将工件放入对应的放置台时,第一检测模块导通,从而使第一控制模块启动。第一控制模块启动后,电机和第二检测模块启动。电机带动圆盘转动,在圆盘转动一定的角度后,每个放
置台随圆盘转动进入下一道工序时,第二检测模块向第二控制模块发出高电平,从而使第二控制模块启动。第二控制模块关闭第一控制模块,电机关闭,圆盘停止转动,从而使每个放置台进入下一道工序时,放置台上有对应数量的工件,有利于降低铆接机生产出不合格的产品的情况出现。
9.在第一夹持机构和第二夹持机构其中一个或全部未将工件放入对应的放置台时,第一检测模块截至,从而使第一控制模块关闭。第一控制模块关闭后,电机关闭,工作人员发现铆接机停止工作后,及时排查故障原因,从而降低铆接机生产出不合格的产品的情况出现。
10.可选的,所述第一检测模块包括第一检测子模块和第二检测子模块,所述第一检测子模块的第一电源端和第二检测子模块的第一电源端均与第一检测模块的第一电源端连接,所述第一检测子模块的第二电源端与第一检测模块的第二电源端连接,所述第一检测子模块的输出端与第二检测子模块的第二电源端连接,所述第二检测子模块的输出端与第一检测模块的输出端连接,所述第一检测子模块的接地端和第二检测子模块的接地端均与第一检测模块的接地端连接,所述第一检测子模块用于检测位于第一夹持机构位置的放置台上的工件,所述第二检测子模块用于检测位于第二夹持机构位置的放置台上的工件。
11.通过采用上述技术方案,第一检测模块启动,从而使第一检测子模块检测位于第一夹持机构位置的放置台上的工件,第二检测子模块检测位于第二夹持机构位置的放置台上的工件。在第一夹持机构将工件放入对应的放置台时,第一检测子模块导通;否则第一检测子模块截至。在第二夹持机构将工件放入对应的放置台时,第二检测子模块导通;否则第二检测子模块截至。通过第一检测子模块和第二检测子模块均导通时,第一检测模块导通,电机启动,电机带动圆盘转动;否则第一检测模块截至,电机关闭,圆盘不转动。
12.可选的,所述第一检测子模块包括第一光电传感器a1、第一电阻器r1、第一三极管q1、第一二极管d1和第一继电器,所述第一继电器包括第一线圈j1和第一常开触头j1-1,所述第一光电传感器a1的电源端、第一二极管d1的阴极和第一线圈j1的一端均连接于第一检测子模块的第一电源端,所述第一光电传感器a1的输出端连接于第一电阻器r1的一端,所述第一电阻器r1的另一端与第一三极管q1的基极连接,所述第一三极管q1的集电极与第一二极管d1的阳极和第一线圈j1的另一端连接,所述第一常开触头j1-1的一端与第一检测子模块的第二电源端连接,所述第一常开触头j1-1的另一端与第一检测子模块的输出端连接,所述第一光电传感器a1的接地端和第一三极管q1的接地端均与第一检测子模块的接地端连接。
13.通过采用上述技术方案,在第一夹持机构将工件放入对应位置的放置台后,第一光电传感器a1发出的光线被第一夹持机构放入放置台的工件遮挡,从而使第一光电传感器a1向第一三极管q1发出高电平,第一三极管q1导通,第一线圈j1得电,第一常开触头j1-1闭合。第一常开触头j1-1闭合,从而使第一检测子模块导通。若第一夹持机构未将工件放入对应位置的放置台,第一光电传感器a1向第一三极管q1发出低电平,第一三极管q1截止,第一线圈j1失电,第一常开触头j1-1断开。第一常开触头j1-1断开,从而使第一检测子模块截止。
14.第一电阻器r1起到限流作用,从而降低流入第一三极管q1的电流过大而使第一三极管q1损坏的情况出现。第一二极管d1用于第一线圈j1的放电回路。
15.可选的,所述第二检测子模块包括第二光电传感器a2、第二电阻器r2、第二三极管q2、第二二极管d2和第二继电器,所述第二继电器包括第二线圈j2和第二常开触头j2-1,所述第二光电传感器a2的电源端、第二二极管d2的阴极和第二线圈j2的一端均连接于第二检测子模块的第一电源端,所述第二光电传感器a2的输出端连接于第二电阻器r2的一端,所述第二电阻器r2的另一端与第二三极管q2的基极连接,所述第二三极管q2的集电极与第二二极管d2的阳极和第二线圈j2的另一端连接,所述第二常开触头j2-1的一端与第二检测子模块的第二电源端连接,所述第二常开触头j2-1的另一端与第二检测子模块的输出端连接,所述第二光电传感器a2的接地端和第二三极管q2的接地端均与第二检测子模块的接地端连接。
16.通过采用上述技术方案,在第二夹持机构将工件放入对应位置的放置台后,第二光电传感器a2发出的光线被第二夹持机构放入放置台的工件遮挡,从而使第二光电传感器a2向第二三极管q2发出高电平,第二三极管q2导通,第二线圈j2得电,第二常开触头j2-1闭合。第二常开触头j2-1闭合,从而使第二检测子模块导通。若第二夹持机构未将工件放入对应位置的放置台,第二光电传感器a2向第二三极管q2发出低电平,第二三极管q2截止,第二线圈j2失电,第二常开触头j2-1断开。第二常开触头j2-1断开,从而使第二检测子模块截止。
17.第二电阻器r2起到限流作用,从而降低流入第二三极管q2的电流过大而使第二三极管q2损坏的情况出现。第二二极管d2用于第二线圈j2的放电回路。
18.可选的,所述第一控制模块包括自锁子模块和控制子模块,所述自锁子模块的第一电源端与第一控制模块的第一电源端连接,所述自锁子模块的第二电源端与第一控制模块的第二电源端连接,所述自锁子模块的第一输出端连接于第一控制模块的第一输出端,所述控制子模块的输入端连接于第一控制模块的输入端,所述自锁子模块的第二输出端连接于第一控制子模块的第二输出端,所述自锁子模块的接地端与控制子模块的电源端连接,所述控制子模块的接地端连接于第一控制模块的接地端,所述控制子模块用于启闭自锁子模块。
19.通过采用上述技术方案,第一检测模块导通后,控制子模块启动。控制子模块启动后,自锁子模块启动。自锁子模块启动,从而锁住控制子模块的启动状态,同时启动电机和第二检测模块。在电机带动圆盘转动后,第一检测模块未检测到位于第一加持机构和第二夹持机构位置的放置台上的工件,从而使第一检测模块截止。而自锁模块保持控制子模块的启动状态,从而使电机继续保持启动状态,直到圆盘转动一定的角度后,第二控制模块启动,控制子模块和自锁子模块关闭,从而使电机关闭。
20.可选的,所述控制子模块包括第三电阻器r3和第三三极管q3,所述第三电阻器r3的一端与控制子模块的输入端连接,所述第三电阻器r3的另一端与第三三极管q3的基极连接,所述第三三极管q3的集电极与控制子模块的电源端连接,所述第三三极管q3的发射极与控制子模块的接地端连接。
21.通过采用上述技术方案,在第一检测模块导通后,第三三极管q3的基极得电,第三三极管q3导通,从而使控制子模块启动。控制子模块启动,自锁子模块启动。之后第一检测模块截止后,第三三极管q3继续保持导通。第三电阻器r3起到限流作用,从而降低流入第三三极管q3的电流过大而使第三三极管q3损坏的情况出现。
22.可选的,所述自锁子模块包括第三二极管d3和第三继电器,所述第三继电器包括第三线圈j3、第三常开触头j3-1和第四常开触头j3-2,所述第三常开触头j3-1的一端、第三二极管d3的阴极和第三线圈j3的一端均与自锁子模块的第一电源端连接,所述第三常开触头j3-1的另一端与自锁子模块的第一输出端连接,所述第三二极管d3的阳极和第三线圈j3的另一端均与自锁子模块的接地端连接,所述第四常开触头j3-2的一端与自锁子模块的第二电源端连接,所述第四常开触头j3-2的另一端与自锁子模块的第二输出端连接。
23.通过采用上述技术方案,在控制子模块启动后,第三线圈j3得电,第三常开触头j3-1闭合,从而保持控制子模块启动;第四常开触头j3-2闭合,电机和第二检测模块启动。在圆盘转动一定角度后,第二检测模块向第二控制模块发出高电平,第二控制模块关闭控制子模块,从而使电机停止。第三二极管d3用于第三线圈j3的放电回路。
24.可选的,所述第二检测模块包括转角传感器a3、比较器ic、第四电阻器r4和第五电阻器r5,所述转角传感器a3用于检测圆盘的转动角度,所述转角传感器a3的电源端和第四电阻器r4的一端均与第二检测模块的电源端连接,所述转角传感器a3的输出端与比较器ic的正向输入端连接,所述第四电阻器r4的另一端连接于第五电阻器r5的一端和比较器ic的反向输入端,所述第五电阻器r5的另一端和转角传感器a3的接地端均与第二检测模块的接地端连接,所述比较器ic的输出端与第二检测模块的输出端连接。
25.通过采用上述技术方案,电机和第二检测模块启动后,第四电阻器r4和第五电阻器r5起到分压作用,从而为比较器ic提供比较电压。转角传感器a3检测圆盘转动的角度,并向比较器ic发送角度检测信号。在圆盘转动一定角度,从而使每个放置台移动到下一个工序的位置时,角度检测信号大于比较电压,比较器ic发出高电平,从而使第二比较模块向第二控制模块发出高电平,第二控制模块启动。
26.可选的,所述第二控制模块包括第六电阻器r6、第四三极管q4、第四二极管d4和第四继电器,所述第四继电器包括第四线圈j4和常闭触头j4-1,所述第六电阻器r6的一端与第二控制模块的输入端连接,所述第六电阻器r6的另一端与第四三极管q4的基极连接,所述第四三极管q4的发射极与第二控制模块的接地端连接,所述第四三极管q4的集电极连接于第四二极管d4的阳极和第四线圈j4的一端,所述第四二极管d4的阴极和第四线圈j4的另一端均与第二控制模块的第二电源端连接,所述常闭触头j4-1的一端连接于第二控制模块的第一电源端,所述常闭触头j4-1的另一端连接于第二控制模块的输出端。
27.通过采用上述技术方案,在第二检测模块向第二控制模块发出高电平后,第四三极管q4导通,第四线圈j4得电,常闭触头j4-1断开。常闭触头j4-1断开,从而使第二控制模块关闭第一控制模块,电机停止转动。
28.综上所述,本技术包括以下至少一种有益技术效果:
29.通过第一检测模块检测第一夹持机构和第二夹持机构是否将工件放入对应位置的放置台,若放置台放入对应的工件,则第一控制模块启动,电机带动圆盘转动,从而带动放置台进入下一工序;
30.通过第二检测模块检测圆盘每次的转动角度,在放置台移动到下一个工序时,第二检测模块向第二控制模块发送角度检测信号,从而使第一控制模块关闭,电机停止带动圆盘转动。
附图说明
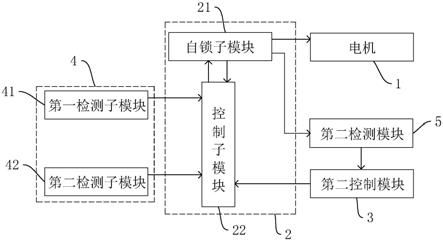
31.图1是本技术实施例的原理框图;
32.图2是本技术实施例的电路图。
33.附图标记说明:1、电机;2、第一控制模块;21、自锁子模块;22、控制子模块;3、第二控制模块;4、第一检测模块;41、第一检测子模块;42、第二检测子模块;5、第二检测模块。
具体实施方式
34.以下结合附图1-2对本技术作进一步详细说明。
35.本技术实施例公开一种全自动铆接机的控制系统。
36.参照图1、图2,一种全自动铆接机的控制系统包括第一检测模块4、第二检测模块5、第一控制模块2、第二控制模块3和电机1。第一检测模块4的第一电源端连接于第一电源vcc1的正极,第一检测模块4的第二电源端连接于第一控制模块2的第一电源端和第二电源vcc2的正极。第一检测模块4的输出端连接于第一控制模块2的第一输出端和第二控制模块3的第一电源端。
37.参照图1、图2,第一控制模块2的第二电源端连接于第三电源vcc3的正极,第一控制模块2的输入端连接于第二控制模块3的输出端。第一控制模块2的第二输出端连接于第二控制模块3的第二电源端、电机1的一端和第二检测模块5的电源端。
38.第二检测模块5的输出端连接于第二控制模块3的输入端。第一检测模块4的接地端、第二检测模块5的接地端、第一控制模块2的接地端、第二控制模块3的接地端和电机1的一端均与电源地连接。
39.第一检测模块4模块用于检测第一夹持机构和第二夹持机构是否将工件放入对应的放置台上。若第一夹持机构和第二检测机构均将工件放入对应的放置台,第一控制模块2启动,从而开启电机1,电机1带动圆盘转动,圆盘带动每个放置台进入下一个工序。之后第二检测模块5检测圆盘转动角度,在圆盘转动一定角度后,每个放置台均进入下一个工序,这时第二检测模块5向第二控制模块3发送高电平,第二控制模块3关闭第一控制模块2,从而使电机1停止。
40.若第一夹持机构和第二检测机构未将工件放入对应的放置台,电机1关闭,工作人员及时关闭检测放置台上工件是否放入,从而降低放置台上未放置完工件直接移动到冲压机构的位置的情况出现,这有利于降低铆接机生产出不合格的产品的情况出现。
41.参照图1、图2,第一检测模块4包括第一检测子模块41和第二检测子模块42,第一检测子模块41的第一电源端连接于第二检测子模块42的第一电源端和第一检测模块4的第一电源端,第一检测子模块41的第二电源端连接于第一检测模块4的第二电源端。第一检测子模块41的输出端连接于第二检测子模块42的第二电源端。
42.第二检测子模块42的输出端连接于第一检测模块4的输出端,第一检测子模块41的接地端和第二检测子模块42的接地端均与第一检测模块4的接地端连接。
43.在第一夹持机构将工件放入对应位置的放置台后,第一检测子模块41启动;在第二夹持机构将工件放入对应位置的放置台后,第二检测子模块42启动。第一检测子模块41和第二检测子模块42均启动,第一检测模块4导通,否则第一检测模块4截止。
44.参照图1、图2,第一检测子模块41包括第一光电传感器a1、第一电阻器r1、第一三
极管q1、第一二极管d1和第一继电器。第一继电器包括第一线圈j1和第一常开触头j1-1。第一光电传感器a1的电源端连接于第一二极管d1的阴极、第一线圈j1的一端和第一检测子模块41的第一电源端。第一光电传感器a1的输出端连接于第二电阻器r2的一端,第一电阻器r1的另一端连接于第一三极管q1的基极。第一三极管q1的集电极连接于第一二极管d1的阳极和第一线圈j1的另一端。
45.第一常开触头j1-1的一端连接于第一检测子模块41的第二电源端,第一常开触头j1-1的另一端与第一检测子模块41的输出端连接。第一光电传感器a1的接地端和第一三极管q1的接地端均与第一检测子模块41的接地端连接。
46.若第一夹持机构将工件放入放置台后,第一光电传感器a1发出的光线被工件遮挡,从而使第一光电传感器a1向第一三极管q1发出高电平,第一三极管q1导通,第一线圈j1得电,第一常开触头j1-1闭合。第一常开触头j1-1闭合,从而使第一检测子模块41启动。若第一夹持机构未将工件放入放置台,第一光电传感器a1发出的光线未被遮挡,从而使第一光电传感器a1向第一三极管q1发出低电平,第一三极管q1截止,第一线圈j1失电,第一常开触头j1-1断开。第一常开触头j1-1断开,从而使第一检测子模块41关闭。
47.第一电阻器r1起到限流作用,从而降低流入第一三极管q1的电流过大而使第一三极管q1损坏的情况出现。第一二极管d1用于第一线圈j1的放电回路。
48.参照图1、图2,第二检测子模块42包括第二光电传感器a2、第二电阻器r2、第二三极管q2、第二二极管d2和第二继电器。第二继电器包括第二线圈j2和第二常开触头j2-1。第二光电传感器a2的电源端连接于第二二极管d2的阴极、第二线圈j2的一端和第一检测子模块41的第一电源端。第二光电传感器a2的输出端连接于第二电阻器r2的一端,第二电阻器r2的另一端连接于第二三极管q2的基极。第二三极管q2的集电极连接于第二二极管d2的阳极和第二线圈j2的另一端。
49.第二常开触头j2-1的一端连接于第一检测子模块41的第二电源端,第二常开触头j2-1的另一端连接于第一检测子模块41的输出端。第二光电传感器a2的接地端和第二三极管q2的接地端均与第一检测子模块41的接地端连接。
50.若第一夹持机构将工件放入放置台后,第二光电传感器a2发出的光线被工件遮挡,从而使第二光电传感器a2向第二三极管q2发出高电平,第二三极管q2导通,第二线圈j2得电,第二常开触头j2-1闭合。第二常开触头j2-1闭合,从而使第一检测子模块41启动。若第一夹持机构未将工件放入放置台,第二光电传感器a2发出的光线未被遮挡,从而使第二光电传感器a2向第二三极管q2发出低电平,第二三极管q2截止,第二线圈j2失电,第二常开触头j2-1断开。第二常开触头j2-1断开,从而使第一检测子模块41关闭。
51.第二电阻器r2起到限流作用,从而降低流入第二三极管q2的电流过大而使第二三极管q2损坏的情况出现。第二二极管d2用于第二线圈j2的放电回路。
52.参照图1、图2,第一控制模块2包括自锁子模块21和控制子模块22,自锁子模块21的第一电源端连接于第一控制模块2的第一电源端。自锁子模块21的第二电源端连接于第一控制模块2的第二电源端,自锁子模块21的第一输出端连接于第一控制模块2的第一输出端。自锁子模块21的第二输出端连接于第一控制子模块22的第二输出端。自锁子模块21的接地端连接于控制子模块22的电源端,控制子模块22的输入端连接于第一控制模块2的输入端,控制子模块22的接地端连接于第一控制模块2的接地端。
53.在第一检测模块4启动后,控制子模块22启动,从而使启动自锁子模块21。自锁子模块21启动后,电机1和第二检测模块5启动。
54.参照图1、图2,控制子模块22包括第三电阻器r3和第三三极管q3。第三电阻器r3的一端连接于控制子模块22的输入端,第三电阻器r3的另一端连接于第三三极管q3的基极。第三三极管q3的集电极连接于控制子模块22的电源端,第三三极管q3的发射极连接于控制子模块22的接地端。
55.在第一检测模块4启动,第三三极管q3接收到高电平,第三三极管q3导通,从而使自锁模块启动。第三电阻器r3起到限流的作用,从而降低流入第三三极管q3的电流过大而使第三三极管q3损坏的情况出现。
56.参照图1、图2,自锁子模块21包括第三二极管d3和第三继电器,第三继电器包括第三线圈j3、第三常开触头j3-1和第四常开触头j3-2。第三常开触头j3-1的一端连接于第三二极管d3的阴极、第三线圈j3的一端和自锁子模块21的第一电源端,第三常开触头j3-1的另一端连接于自锁子模块21的第一输出端。第三二极管d3的阳极连接于第三线圈j3的另一端和自锁子模块21的接地端。第四常开触头j3-2的一端连接于自锁子模块21的第二电源端,第四常开触头j3-2的另一端连接于自锁子模块21的第二输出端。
57.第三三极管q3导通后,第三线圈j3得电,第三常开触头j3-1闭合,从而形成自锁,第三三极管q3保持导通。第四常开触头j3-2闭合,从而使电机1和第二检测模块5启动。
58.参照图1、图2,第二检测模块5包括转角传感器a3、比较器ic、第四电阻器r4和第五电阻器r5。转角传感器a3的电源端连接于第四电阻器r4的一端和第二检测模块5的电源端,转角传感器a3的输出端连接于比较器ic的正向输入端。第四电阻器r4的另一端连接于第五电阻器r5的一端和比较器ic的反向输入端,第五电阻器r5的另一端连接于转角传感器a3的接地端和第二检测模块5的接地端。比较器ic的输出端连接于第二检测模块5的输出端。
59.转角传感器a3根据圆盘的转动角度向比较器ic发送角度检测信号。第四电阻器r4和第五电阻器r5起到分压作用,从而为比较器ic提供比较电压。电机1带动圆盘转动,在圆盘转动一定角度后,每个放置台进入下一工序,从而使转角检测信号大于比较电压,比较器ic发出高电平。
60.参照图1、图2,第二控制模块3包括第六电阻器r6、第四三极管q4、第四二极管d4和第四继电器,第四继电器包括第四线圈j4和常闭触头j4-1。第六电阻器r6的一端连接于第二控制模块3的输入端,第六电阻器r6的另一端连接于第四三极管q4的基极连接。第四三极管q4的发射极连接于第二控制模块3的接地端,第四三极管q4的集电极连接于第四二极管d4的阳极和第四线圈j4的一端。第四二极管d4的阴极连接于第四线圈j4的另一端和第二控制模块3的第二电源端。常闭触头j4-1的一端连接于第二控制模块3的第一电源端,常闭触头j4-1的另一端连接于第二控制模块3的输出端。
61.在第二控制模块3接收到高电平后,第四三极管q4导通,第四线圈j4得电,常闭触头j4-1断开。常闭触头j4-1断开,从而使第二控制模块3关闭第一控制模块2,电机1停止转动。
62.本技术实施例一种全自动铆接机的控制系统的实施原理为:第一夹持机构和第二夹持机构均将工件放入对应的放置台,第一光电传感器a1和第二光电传感器a2发出高电平,从而使第一三极管q1和第二三极管q2导通,第一线圈j1和第二线圈j2得电,第一常开触
头j1-1和第二常开触头j2-1闭合。
63.第一常开触头j1-1和第二常开触头j2-1闭合,从而使第三三极管q3得电导通。第三三极管q3导通,第三常开触头j3-1和第四常开触头j3-2闭合。第三常开触头j3-1闭合,这时这时不论第一常开触头j1-1和第二常开触头j2-1闭合还是断开,第三三极管q3均保持导通。第四常开触头j3-2闭合,电机1启动。电机1带动圆盘转动一定角度,每个放置台进入下一个工序后,转角传感器a3向比较器ic发出的角度检测信号大于比较电压,比较器ic发出高电平。比较器ic发出高电平,第四三极管q4导通,第四线圈j4得电,常闭触头j4-1断开,第三三极管q3失电截止。第三三极管q3失电截止后,第三线圈j3失电,第三常开触头j3-1和第四常开触头j3-2均断开,电机1关闭。
64.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1