一种扫地机器人装配线用翻转结构的制作方法
1.本实用新型涉及装配线设备技术领域,具体是一种扫地机器人装配线用翻转结构。
背景技术:
2.扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作。一般采用刷扫和真空方式,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能。一般来说,将完成清扫、吸尘、擦地工作的机器人,也统一归为扫地机器人。
3.目前扫地机器人经装配线组装时,根据组装需要,扫地机器人需要进行翻转,以安装不同位置的部件,目前的翻转机构复杂,翻转需要多个位置协同进行,效率低。为此,发明人综合各类因素提出了一种扫地机器人装配线用翻转结构。
技术实现要素:
4.本实用新型的目的在于提供一种扫地机器人装配线用翻转结构,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种扫地机器人装配线用翻转结构,包括装配板,所述装配板通过支吊架固定,支吊架包括上吊板和下吊板,上吊板顶部连接有伸缩杆,下吊板与装配板相连接,上吊板与下吊板错位相贴,上吊板上底部安装有马达,马达上传动连接有固定轴,固定轴穿过上吊板伸至下吊板顶部内,固定轴与下吊板之间通过限位齿形成传动连接,装配板呈方形中通结构设置。
7.扫地机器人固定于装配板上,翻转时先利用伸缩杆将上吊板与下吊板拉起,然后马达工作利用固定轴与下吊板的连接关系,带动下吊板以固定轴为中心进行转动,装配板左右颠倒从而进行翻转,进而带动扫地机器人进行翻转,满足其装配需求,其结构简单,操作便利快捷。
8.作为本实用新型的进一步方案:所述下吊板底部螺栓固定有吊钩,装配板前后两端中间位置分别螺栓安装有固定环,吊钩与固定环相连接,既满足连接需求,同时不阻碍装配板的翻转。
9.作为本实用新型的再进一步方案:所述装配板上前后侧面中间位置焊接连接有中心轴杆,中心轴杆固定于装配线上,翻转时装配板以中心轴杆为轴心进行翻转,保障翻转位置的固定。
10.作为本实用新型的再进一步方案:所述装配板前后侧面位置设有导轨,导轨呈圆形设置,导轨上侧面开设有限位滑槽,装配板上前后侧面靠两端位置分别焊接固定有定位杆,定位杆抵至限位滑槽内,对装配板翻转时进行限位支撑固定,避免其位移。
11.作为本实用新型的再进一步方案:所述装配板内侧壁上一体成型连接有固定块,
固定块上下两面分别通过松紧钉固定有限位板,扫地机器人则同过限位板夹住进行固定。
12.作为本实用新型的再进一步方案:所述松紧钉包括钉杆、套环和限位块,钉杆穿过限位板以及对应位置的固定块,钉杆上靠前后两端位置分别预设有环形的下沉槽,下沉槽与钉杆前后两端之间同时设有凹槽,套环套于下沉槽外侧的顶杆上,限位块一体成型连接于套环内侧且与凹槽相对应,套环套于钉杆上时,限位块与凹槽对应滑入下沉槽内,然后转动套环使限位块与凹槽错开即可进行限位,操作方便。
13.与现有技术相比,本实用新型具有以下几个方面的有益效果:
14.1、本实用新型提供一种扫地机器人装配线用翻转结构,结构设置巧妙且布置合理,本实用新型中翻转时先利用伸缩杆将上吊板与下吊板拉起,然后马达工作利用固定轴与下吊板的连接关系,带动下吊板以固定轴为中心进行转动,装配板左右颠倒从而进行翻转,进而带动扫地机器人进行翻转,满足其装配需求,其结构简单,操作便利快捷;
15.2、本实用新型进一步装配板前后侧面位置设有导轨,导轨呈圆形设置,导轨上侧面开设有限位滑槽,装配板上前后侧面靠两端位置分别焊接固定有定位杆,定位杆抵至限位滑槽内,对装配板翻转时进行限位支撑固定,避免其位移;
16.3、本实用新型进一步套环套于钉杆上时,限位块与凹槽对应滑入下沉槽内,然后转动套环使限位块与凹槽错开即可进行限位,操作方便;
17.4、本实用新型中该翻转结构简单,使用操作方便,翻转过程稳定可靠。
附图说明
18.图1为一种扫地机器人装配线用翻转结构的侧视图。
19.图2为一种扫地机器人装配线用翻转结构中支吊架的结构示意图。
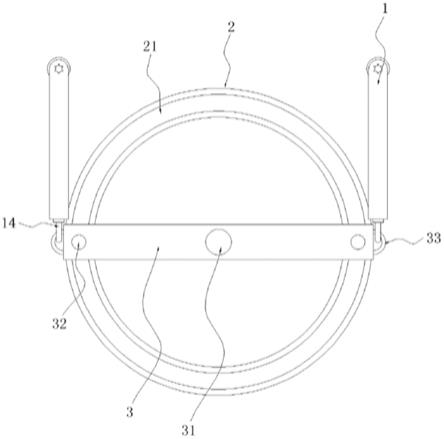
20.图3为一种扫地机器人装配线用翻转结构中装配板的结构示意图。
21.图4为一种扫地机器人装配线用翻转结构中松紧钉的结构示意图。
22.图中:1、支吊架;11、上吊板;12、下吊板;13、伸缩杆;14、吊钩;15、马达;16、固定轴;17、限位齿;2、导轨;21、限位滑槽;3、装配板;31、中心轴杆;32、定位杆;33、固定环;34、固定块;35、限位板;36、松紧钉;361、钉杆;362、套环;363、限位块;364、下沉槽;365、凹槽。
具体实施方式
23.下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
24.实施例一,请参阅图1和2,一种扫地机器人装配线用翻转结构,包括支吊架1、导轨2和装配板3;
25.支吊架1包括上吊板11和下吊板12,上吊板11顶部连接有伸缩杆13,下吊板12底部螺栓固定有吊钩14,上吊板11与下吊板12错位相贴,上吊板11上底部安装有马达15,马达15上传动连接有固定轴16,固定轴16穿过上吊板11伸至下吊板12顶部内,固定轴16与下吊板12之间通过限位齿17形成传动连接;
26.导轨2设于装配板前后侧面位置,导轨2呈圆形设置,导轨2上侧面开设有限位滑槽21;
27.装配板3呈方形中通结构设置,装配板3上前后侧面靠两端位置分别焊接固定有定位杆32,定位杆32抵至限位滑槽21内,装配板3上前后侧面中间位置焊接连接有中心轴杆
31,装配板3前后两端中间位置分别螺栓安装有固定环33,吊钩14与固定环33相连接。
28.实施例二,请参阅图1~3,一种扫地机器人装配线用翻转结构,包括支吊架1、导轨2和装配板3;
29.支吊架1包括上吊板11和下吊板12,上吊板11顶部连接有伸缩杆13,下吊板12底部螺栓固定有吊钩14,上吊板11与下吊板12错位相贴,上吊板11上底部安装有马达15,马达15上传动连接有固定轴16,固定轴16穿过上吊板11伸至下吊板12顶部内,固定轴16与下吊板12之间通过限位齿17形成传动连接;
30.导轨2设于装配板前后侧面位置,导轨2呈圆形设置,导轨2上侧面开设有限位滑槽21;
31.装配板3呈方形中通结构设置,装配板3上前后侧面靠两端位置分别焊接固定有定位杆32,定位杆32抵至限位滑槽21内,装配板3上前后侧面中间位置焊接连接有中心轴杆31,装配板3前后两端中间位置分别螺栓安装有固定环33,吊钩14与固定环33相连接;
32.装配板3内侧壁上一体成型连接有固定块34,固定块34上下两面分别通过松紧钉36固定有限位板35。
33.实施例三,请参阅图4,本实施例在实施例二的基础上增加了如下技术特征:
34.松紧钉36包括钉杆361、套环362和限位块363,钉杆361穿过限位板35以及对应位置的固定块34,钉杆361上靠前后两端位置分别预设有环形的下沉槽364,下沉槽364与钉杆361前后两端之间同时设有凹槽365,套环363套于下沉槽364外侧的顶杆361上,限位块363一体成型连接于套环363内侧且与凹槽365相对应。
35.本实用新型的工作原理是:使用时通过松紧钉36与限位板35将扫地机器人外壳固定在装配板3上,翻转时先伸缩杆13工作进行通过上吊板11与下吊板12分别拉动装配板3的两侧一升一降使其倾斜,然后马达15工作利用固定轴16与下吊板12的连接关系,带动下吊板12以固定轴16为中心进行转动,从而推动装配板3加剧倾斜进行左右颠倒翻转,进而带动扫地机器人进行翻转,满足其装配需求,其结构简单,操作便利快捷。
36.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本实用新型中的具体含义。
37.上面对本专利的较佳实施方式作了详细说明,但是本专利并不限于上述实施方式,在本领域的普通技术人员所具备的知识范围内,还可以在不脱离本专利宗旨的前提下作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1