用于精密齿轮转移的全自动智能机械手抓取系统的制作方法
1.本技术涉及齿轮生产设备技术领域,尤其是涉及一种用于精密齿轮转移的全自动智能机械手抓取系统。
背景技术:
2.目前随着智能机械手的广泛应用,越来越多的企业开始采用自动化程度较高的生产线,来代替人工操作,从而实现快速转移待加工产品的目的。
3.针对上述中的相关技术,发明人认为存在以下缺陷:在智能机械手工作过程中,难免会出现问题存在,如果待加工产品为非常精密且昂贵的配件,例如待加工产品为精密齿轮时,这些掉落的精密齿轮会直接摔坏,造成极大的成本损失,故而有待改进。
技术实现要素:
4.为了改善常见的智能机械手所抓取的精密齿轮会因意外掉落而摔坏的问题,本技术提供一种用于精密齿轮转移的全自动智能机械手抓取系统。
5.本技术提供一种用于精密齿轮转移的全自动智能机械手抓取系统,采用如下的技术方案:
6.一种用于精密齿轮转移的全自动智能机械手抓取系统,包括机架、升降装置、智能机械手、中心工作台、周边工作台、摄像头组、承接防护装置、切换驱动装置、齿轮掉落检测装置和控制模块;
7.所述机架为长方体框架式结构,所述升降装置安装于所述机架顶部的中间位置处,所述智能机械手安装于所述升降装置的活动端上,所述升降装置用于驱使所述智能机械手自由升降,所述中心工作台位于所述升降装置的正下方,所述周边工作台设置有多个且环绕所述中心工作台间隔布置,所述中心工作台和每一个所述周边工作台之间都形成有一条齿轮转移路径,所述智能机械手用于夹取精密齿轮并在多条所述齿轮转移路径上转移精密齿轮;
8.所述摄像头组安装于所述机架的顶部且用于拍摄所述精密齿轮的位置图像信息,所述控制模块根据获取到的位置图像信息控制所述智能机械手按照预设的程序在不同的齿轮转移路径上转移精密齿轮;
9.所述齿轮掉落检测装置设置于所述智能机械手、所述周边工作台和所述中心工作台上,所述齿轮掉落检测装置用于实时检测所述智能机械手上夹取的精密齿轮是否非正常掉落;
10.所述承接防护装置至少设置有一组且正常状态下位于部分所述齿轮转移路径的下方,所述切换驱动装置设置于所述中心工作台和所述周边工作台之间,当所述齿轮掉落检测装置检测到精密齿轮从所述智能机械手上非正常掉落时,所述控制模块控制所述切换驱动装置动作以带动所述承接防护装置运动至相应的齿轮转移路径下方并承接保护掉落的精密齿轮。
11.通过采用上述技术方案,摄像头组可以通过拍摄精密齿轮的位置图像信息,进而有利于控制模块精准判断精密齿轮位置,从而控制智能机械手及时的进行抓取及转移精密齿轮操作,在此过程中,该系统也可以得知:精密齿轮在哪一条齿轮转移路径上运动,一旦齿轮掉落检测装置检测到精密齿轮从智能机械手上非正常掉落时,切换驱动装置可以根据控制模块的指令,提前将承接防护装置驱使至对应的齿轮转移路径下方,承接防护装置可以及时且有效的避免精密齿轮掉落到地面上,对于非常精密且昂贵的配件,具有良好的保护效果,安全系数更高。
12.可选的,所述承接防护装置包括固定框和防护网,所述防护网安装于所述固定框内,所述防护网为弹性绳网,所述固定框的宽度与所述中心工作台/所述周边工作台宽度的宽度相一致。
13.通过采用上述技术方案,固定框可以方便防护网安装固定,也可以方便承接防护装置安装固定于切换驱动装置,同时防护网具有良好的弹性,避免掉落精密齿轮刚性碰撞,进而对精密齿轮的保护效果更好。
14.可选的,所述承接防护装置还包括安全气囊,所述防护网和所述固定框之间形成凹陷安装槽,所述安全气囊固定安装于所述凹陷安装槽,所述安全气囊受控于所述控制模块的指令而启动充气。
15.通过采用上述技术方案,安全气囊可以进一步提升承接防护装置的安全系数,而且安全气囊不是一直开启充气状态,只有在齿轮掉落检测装置检测到精密齿轮从智能机械手上非正常掉落时,安全气囊才会迅速启动充气,更好的保护精密齿轮;安全气囊未充气时,体积小,方便安装和切换位置,有利于承接防护装置正常转动。
16.可选的,所述切换驱动装置包括驱动盘、转动环和切换伺服电机,所述驱动盘和所述转动环均水平布置且在同一水平面上,所述驱动盘转动安装于所述中心工作台上,所述切换伺服电机安装于所述中心工作台内且其输出轴带动所述驱动盘转动,所述承接防护装置安装于所述转动环的内侧壁和所述驱动盘的外侧壁之间,所述周边工作台朝向所述中心工作台的一侧设置有与所述转动环相适配的转动槽,所述转动环在多个所述转动槽之间自由转动。
17.通过采用上述技术方案,切换伺服电机工作时,可以带动驱动盘转动,承接防护装置可以稳定的安装在驱动盘和转动环之间,转动环被多个转动槽所承托,进而整个切换驱动装置可以非常平稳的转动,上述设计的切换驱动装置,结构简单,制作方便,运行稳定。
18.可选的,所述转动环的外侧壁设置有一圈外齿,所述周边工作台内设置有辅助驱动齿轮和辅助伺服电机,所述辅助驱动齿轮转动安装于所述转动槽内且其转动轴线竖向布置,所述辅助伺服电机的输出轴连接于所述辅助驱动齿轮并驱使其转动,所述辅助驱动齿轮和所述转动环的外齿相啮合。
19.通过采用上述技术方案,在切换伺服电机驱使驱动盘转动,以带动承接防护装置切换位置的同时,辅助驱动齿轮和辅助伺服电机相互配合,也可以从外部带动转动环转动,进而辅助带动承接防护装置切换位置,上述多动力驱动结构,方便快速驱使驱动盘和转动环转动,更有利于承接防护装置稳定转动,切换操作更及时且高效。
20.可选的,所述转动槽的槽底设置有一排呈弧形布置且自由滚动的滚珠,所述滚珠抵接于所述转动环的下表面。
21.通过采用上述技术方案,滚珠可以将滑动摩擦转化为滚动摩擦,大幅度降低了摩擦系数,进而大大减小转动环在转动过程中的阻力,减小动力损耗,还可以尽量避免转动环在转动过程中齿轮巨大的噪音。
22.可选的,所述齿轮掉落检测装置包括第一重力传感器、第二重力传感器和压力传感器,所述智能机械手上设置有用于夹取精密齿轮的气动夹指,所述压力传感器安装于所述气动夹指的夹板内侧,所述第一重力传感器安装于所述中心工作台的上表面,所述第二重力传感器安装于所述周边工作台的上表面。
23.通过采用上述技术方案,在精密齿轮被转移的过程中,只要是精密齿轮正常转移,那么精密齿轮存在以下三种位置:在中心工作台上、在智能机械手的气动夹指上、在周边工作台上,因此一旦第一重力传感器、第二重力传感器和压力传感器中有一个传感器检测到了齿轮信号,则该系统可以快速判断为正常运行状态;一旦第一重力传感器、第二重力传感器和压力传感器都没有检测到齿轮信号,那么该系统可以快速判断为非正常运行状态,即智能机械手的气动夹指上的精密齿轮已经掉落,上述设计的齿轮掉落检测装置,检测精准度更高、更及时。
24.可选的,所述摄像头组设置有四个摄像头,四个所述摄像头分别安装于所述机架的顶部四角处。
25.通过采用上述技术方案,四个摄像头可以从四个不同的方位去拍摄对应的精密齿轮的位置,进而有利于该系统可以至少获取到四个不同的齿轮定位图像,从而自动且精准的获取精密齿轮当前所处的位置和即将进入的齿轮转移路径,间接有利于该系统快速反应以驱使承接防护装置运动至精密齿轮的下方,对于齿轮的安全系数更高,系统运行更加稳定。
26.可选的,所述升降装置包括升降气缸和安装板,所述升降气缸的主体安装于所述机架的顶部中间位置处,所述升降气缸的伸缩杆朝下布置,所述安装板的上表面固定安装于所述升降气缸的伸缩杆底部,所述智能机械手安装于所述安装板的下表面。
27.通过采用上述技术方案,升降气缸为常见的动力源配件,购买、安装、更换、维修都很方便,安装板则可以确保升降气缸和智能机械手的顶部之间稳定连接,进而可以带动智能机械手稳定升降,上述设计的升降装置,结构简单且牢固。
28.可选的,所述机架由方钢管制作而成,所述机架的顶部设置有十字安装架,所述十字安装架的下表面设置有补光led灯。
29.通过采用上述技术方案,方钢管具有结构强度高且重量较轻的优点,进而制作机架更加方便且成本低,而且得到的机架还结构牢固;十字安装架为升降装置和智能机械手提供了稳定的安装基础;在有需要的时候补光led灯可以开启,照亮十字安装架下方的空间,进而有利于摄像头组精准且清晰的拍摄精密齿轮的位置,有利于该系统快速反应:精密齿轮可能从哪一条齿轮转移路径上掉落,对于齿轮的安全系数更高。
30.综上所述,本技术包括以下至少一种有益技术效果:
31.摄像头组可以通过拍摄精密齿轮的位置图像信息,进而有利于控制模块精准判断精密齿轮位置,从而控制智能机械手及时的进行抓取及转移精密齿轮操作,在此过程中,该系统也可以得知:精密齿轮在哪一条齿轮转移路径上运动,一旦齿轮掉落检测装置检测到精密齿轮从智能机械手上非正常掉落时,切换驱动装置可以根据控制模块的指令,提前将
承接防护装置驱使至对应的齿轮转移路径下方,承接防护装置可以及时且有效的避免精密齿轮掉落到地面上,对于非常精密且昂贵的配件,具有良好的保护效果;
32.一旦第一重力传感器、第二重力传感器和压力传感器都没有检测到齿轮信号,那么该系统可以快速判断为非正常运行状态,即智能机械手的气动夹指上的精密齿轮已经掉落,上述设计的齿轮掉落检测装置,检测精准度更高、更及时。
附图说明
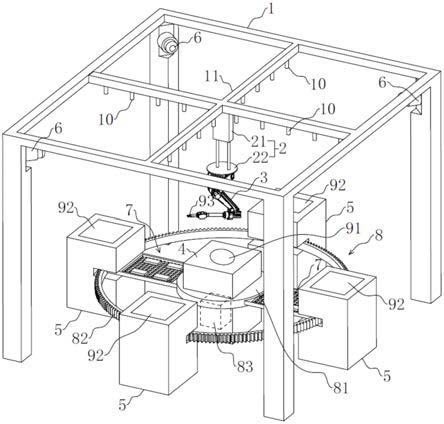
33.图1是本技术实施例的用于精密齿轮转移的全自动智能机械手抓取系统的结构示意图。
34.图2是本技术实施例的辅助驱动齿轮和辅助伺服电机的结构示意图。
35.图3是本技术实施例的承接防护装置的结构示意图。
36.附图标记说明:1、机架;11、十字安装架;2、升降装置;21、升降气缸;22、安装板;3、智能机械手;4、中心工作台;5、周边工作台;51、转动槽;52、滚珠;6、摄像头;7、承接防护装置;71、固定框;72、防护网;73、安全气囊;8、切换驱动装置;81、驱动盘;82、转动环;83、切换伺服电机;84、辅助驱动齿轮;85、辅助伺服电机;91、第一重力传感器;92、第二重力传感器;93、压力传感器;10、补光led灯。
具体实施方式
37.以下结合附图1-3对本技术作进一步详细说明。
38.本技术实施例公开一种用于精密齿轮转移的全自动智能机械手抓取系统。参照图1和图2,用于精密齿轮转移的全自动智能机械手抓取系统包括机架1、升降装置2、智能机械手3、中心工作台4、周边工作台5、摄像头组、承接防护装置7、切换驱动装置8、齿轮掉落检测装置和控制模块。
39.机架1为长方体框架式结构,升降装置2安装于机架1顶部的中间位置处,智能机械手3安装于升降装置2的活动端上,升降装置2用于驱使智能机械手3自由升降,中心工作台4位于升降装置2的正下方,周边工作台5设置有四个且环绕中心工作台4间隔布置,中心工作台4和每一个周边工作台5之间都形成有一条齿轮转移路径,智能机械手3用于夹取精密齿轮并在多条齿轮转移路径上转移精密齿轮。
40.摄像头组安装于机架1的顶部且用于拍摄精密齿轮的位置图像信息,控制模块根据获取到的位置图像信息控制智能机械手3按照预设的程序在不同的齿轮转移路径上转移精密齿轮。
41.齿轮掉落检测装置设置于智能机械手3、周边工作台5和中心工作台4上,齿轮掉落检测装置用于实时检测智能机械手3上夹取的精密齿轮是否非正常掉落。
42.承接防护装置7设置有两组且对称布置,正常状态下承接防护装置7位于部分齿轮转移路径的下方,切换驱动装置8设置于中心工作台4和周边工作台5之间,当齿轮掉落检测装置检测到精密齿轮从智能机械手3上非正常掉落时,控制模块控制切换驱动装置8动作以带动承接防护装置7运动至相应的齿轮转移路径下方并承接保护掉落的精密齿轮。
43.切换驱动装置8包括驱动盘81、转动环82和切换伺服电机83,驱动盘81和转动环82均水平布置且在同一水平面上,驱动盘81转动安装于中心工作台4上,切换伺服电机83安装
于中心工作台4内且其输出轴带动驱动盘81转动,承接防护装置7安装于转动环82的内侧壁和驱动盘81的外侧壁之间,周边工作台5朝向中心工作台4的一侧设置有与转动环82相适配的转动槽51,转动环82在多个转动槽51之间自由转动。
44.切换伺服电机83工作时,可以带动驱动盘81转动,承接防护装置7可以稳定的安装在驱动盘81和转动环82之间,转动环82被多个转动槽51所承托,进而整个切换驱动装置8可以非常平稳的转动,上述设计的切换驱动装置8,结构简单,制作方便,运行稳定。
45.转动环82的外侧壁设置有一圈外齿,周边工作台5内设置有辅助驱动齿轮84和辅助伺服电机85,辅助驱动齿轮84转动安装于转动槽51内且其转动轴线竖向布置,辅助伺服电机85的输出轴连接于辅助驱动齿轮84并驱使其转动,辅助驱动齿轮84和转动环82的外齿相啮合。
46.在切换伺服电机83驱使驱动盘81转动,以带动承接防护装置7切换位置的同时,辅助驱动齿轮84和辅助伺服电机85相互配合,也可以从外部带动转动环82转动,进而辅助带动承接防护装置7切换位置,上述多动力驱动结构,方便快速驱使驱动盘81和转动环82转动,更有利于承接防护装置7稳定转动,切换操作更及时且高效。
47.转动槽51的槽底设置有一排呈弧形布置且自由滚动的滚珠52,滚珠52抵接于转动环82的下表面,滚珠52可以将滑动摩擦转化为滚动摩擦,大幅度降低了摩擦系数,进而大大减小转动环82在转动过程中的阻力,减小动力损耗,还可以尽量避免转动环82在转动过程中齿轮巨大的噪音。
48.齿轮掉落检测装置包括第一重力传感器91、第二重力传感器92和压力传感器93,智能机械手3上设置有用于夹取精密齿轮的气动夹指,压力传感器93安装于气动夹指的夹板内侧,第一重力传感器91安装于中心工作台4的上表面,第二重力传感器92安装于周边工作台5的上表面。
49.在精密齿轮被转移的过程中,只要是精密齿轮正常转移,那么精密齿轮存在以下三种位置:在中心工作台4上、在智能机械手3的气动夹指上、在周边工作台5上,因此一旦第一重力传感器91、第二重力传感器92和压力传感器93中有一个传感器检测到了齿轮信号,则该系统可以快速判断为正常运行状态;一旦第一重力传感器91、第二重力传感器92和压力传感器93都没有检测到齿轮信号,那么该系统可以快速判断为非正常运行状态,即智能机械手3的气动夹指上的精密齿轮已经掉落,上述设计的齿轮掉落检测装置,检测精准度更高、更及时。
50.摄像头组设置有四个摄像头6,四个摄像头6分别安装于机架1的顶部四角处,四个摄像头6可以从四个不同的方位去拍摄对应的精密齿轮的位置,进而有利于该系统可以至少获取到四个不同的齿轮定位图像,从而自动且精准的获取精密齿轮当前所处的位置和即将进入的齿轮转移路径,间接有利于该系统快速反应以驱使承接防护装置7运动至精密齿轮的下方,对于齿轮的安全系数更高,系统运行更加稳定。
51.升降装置2包括升降气缸21和安装板22,升降气缸21的主体安装于机架1的顶部中间位置处,升降气缸21的伸缩杆朝下布置,安装板22的上表面固定安装于升降气缸21的伸缩杆底部,智能机械手3安装于安装板22的下表面。升降气缸21为常见的动力源配件,购买、安装、更换、维修都很方便,安装板22则可以确保升降气缸21和智能机械手3的顶部之间稳定连接,进而可以带动智能机械手3稳定升降,上述设计的升降装置2,结构简单且牢固。
52.机架1由方钢管制作而成,机架1的顶部设置有十字安装架11,十字安装架11的下表面设置有补光led灯10,补光led灯10设置有两排且交叉呈十字形状,从而补光led灯10的照射范围更广。方钢管具有结构强度高且重量较轻的优点,进而制作机架1更加方便且成本低,而且得到的机架1还结构牢固;十字安装架11为升降装置2和智能机械手3提供了稳定的安装基础;在有需要的时候补光led灯10可以开启,照亮十字安装架11下方的空间,进而有利于摄像头组精准且清晰的拍摄精密齿轮的位置,有利于该系统快速反应:精密齿轮可能从哪一条齿轮转移路径上掉落,对于齿轮的安全系数更高。
53.参照图1和图3,承接防护装置7包括固定框71和防护网72,防护网72安装于固定框71内,防护网72为弹性绳网,固定框71的宽度与中心工作台4/周边工作台5宽度的宽度相一致。
54.固定框71可以方便防护网72安装固定,也可以方便承接防护装置7安装固定于切换驱动装置8,同时防护网72具有良好的弹性,避免掉落精密齿轮刚性碰撞,进而对精密齿轮的保护效果更好。
55.承接防护装置7还包括安全气囊73,安全气囊73设置有四个且呈矩形布置,防护网72和固定框71之间形成凹陷安装槽,安全气囊73固定安装于凹陷安装槽,安全气囊73受控于控制模块的指令而启动充气。
56.安全气囊73可以进一步提升承接防护装置7的安全系数,而且安全气囊73不是一直开启充气状态,只有在齿轮掉落检测装置检测到精密齿轮从智能机械手3上非正常掉落时,安全气囊73才会迅速启动充气,更好的保护精密齿轮;安全气囊73未充气时,体积小,方便安装和切换位置,有利于承接防护装置7正常转动。
57.本技术实施例一种用于精密齿轮转移的全自动智能机械手抓取系统的实施原理为:摄像头组可以通过拍摄精密齿轮的位置图像信息,进而有利于控制模块精准判断精密齿轮位置,从而控制智能机械手3及时的进行抓取及转移精密齿轮操作,在此过程中,该系统也可以得知:精密齿轮在哪一条齿轮转移路径上运动,一旦齿轮掉落检测装置检测到精密齿轮从智能机械手3上非正常掉落时,切换驱动装置8可以根据控制模块的指令,提前将承接防护装置7驱使至对应的齿轮转移路径下方,承接防护装置7可以及时且有效的避免精密齿轮掉落到地面上,对于非常精密且昂贵的配件,具有良好的保护效果,安全系数更高。
58.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1