一种自动化激光焊接设备的制作方法
1.本发明涉及电路板焊接技术领域,特别涉及一种自动化激光焊接设备。
背景技术:
2.激光焊接是一种较精密的焊接方式,主要利用高能量密度的激光束作为热源,在电路板焊接元器件、屏蔽线时也常用到激光焊接。激光焊接的过程是热传导,激光辐射加热焊脚表面,使靠近焊脚的焊锡接触焊脚表面而熔化,最终附着在焊盘上,完成精密焊接。
3.如果要在电路板的两面焊接一根从一侧绕过的屏蔽线,如图1所示。图1中的屏蔽线(4)两端分别焊接到位于电路板(16)两面的焊盘上。现有的激光焊接设备通常需要在完成一面的焊接后,将电路板翻转而进行另一面的焊接,其中在翻转动作前后涉及到两个工位,因此存在焊接效率低下的问题。
技术实现要素:
4.本发明要解决的技术问题是在焊接两端分别连接电路板两面的屏蔽线时如何提高焊接效率,提供一种自动化激光焊接设备。
5.本发明的技术方案是,一种自动化激光焊接设备,包括设备平台,所述设备平台上设有能够沿着x轴、y轴、以及z轴移动的激光头和送锡装置,所述设备平台上还设有用于收卷屏蔽线的收卷装置、用于输送屏蔽线的输送装置、用于切割屏蔽线的切割装置、以及用于牵引屏蔽线的牵引装置,所述收卷装置、所述输送装置、所述切割装置、以及所述牵引装置沿着屏蔽线的引出路径依次排列,所述设备平台上还设有能够独立于所述激光头和所述送锡装置沿着z轴移动的载板,所述载板上设有沿着屏蔽线的引出路径并排的第一驱动轴和第二驱动轴,所述第一驱动轴通过轴承连接在所述载板上,所述第二驱动轴通过双螺旋纹连接在所述载板上,所述载板上还设有用于驱动所述第一驱动轴和所述第二驱动轴相向各旋转90度的旋转驱动装置,所述第二驱动轴在旋转时沿着z轴高度降低,所述第一驱动轴的底部和所述第二驱动轴的底部均设有用于夹紧屏蔽线的第一夹爪,所述设备平台上还设有供电路板垫高的垫座,所述电路板的上表面设有第一焊盘和带过孔的第二焊盘,所述设备平台上还设有位于所述第二焊盘下方的顶升杆;其中,所述牵引装置将收卷于收卷装置的屏蔽线拉出,所述第一夹爪随着所述载板沿着z轴下降夹紧所述屏蔽线,所述切割装置截断所述屏蔽线,所述第一夹爪再次随着所述载板沿着z轴下降移送所述屏蔽线,所述旋转驱动装置驱动两所述第一夹爪相向各旋转90度以使所述屏蔽线的一端从所述电路板的上表面接触所述第一焊盘、所述屏蔽线的另一端从所述电路板的下表面靠近所述第二焊盘,所述顶升杆上顶使所述屏蔽线接触所述第二焊盘,所述激光头和送锡装置沿着x轴分别移动至所述第一焊盘和所述第二焊盘的上方进行焊接。
6.作为一种实施方式,所述送锡装置包括分别设于所述激光头两侧的第一安装架和第二安装架,所述第一安装架上设有第一送锡杆,所述第二安装架上设有第二送锡杆,所述第一送锡杆和所述第二送锡杆分别从所述激光头两侧将焊锡丝向激光头下方汇聚。
7.作为一种实施方式,所述设备平台上设有y轴模组,所述y轴模组上设有x轴模组,所述x轴模组上设有z轴模组,所述z轴模组上设有安装板,所述激光头和所述送锡装置设于所述安装板上。
8.作为一种实施方式,所述输送装置包括位于屏蔽线下方的主动轮和位于屏蔽线上方的第一从动轮和第二从动轮,所述第一从动轮、所述主动轮、以及所述第二从动轮沿着屏蔽线的引出路径依次排列。
9.作为一种实施方式,所述切割装置包括底座,所述底座上设有过槽,所述过槽提供屏蔽线穿过,所述切割装置还包括位于所述底座上方的截断气缸,所述截断气缸的动作轴上设有伸入所述过槽的切刀。
10.作为一种实施方式,所述牵引装置包括沿着y轴设在所述y轴模组的底座上的牵引电缸,所述牵引电缸的输出端连接有滑座,所述滑座上设有用于夹紧屏蔽线的第二夹爪。
11.作为一种实施方式,所述x轴模组的一侧通过折板连接有升降模组,所述载板设于所述升降模组上。
12.作为一种实施方式,所述旋转驱动装置包括设于所述第一驱动轴端部和所述第二驱动轴端部的齿轮,两所述齿轮之间设有齿条,所述载板上设有用于驱动所述齿条移动的推进气缸,当所述齿条推进时驱动两所述齿轮同时转动。
13.作为一种实施方式,所述齿条接近于y形并且两侧设有齿面,所述齿条通过两侧的所述齿面分别和两所述齿轮啮合。
14.作为一种实施方式,所述第一夹爪包括相对的两个夹块,所述夹块上可转动连接有转动块,所述转动块上开设有供屏蔽线配合的线槽;当两所述第一夹爪夹紧屏蔽线时,所述屏蔽线嵌入所述线槽内,当所述旋转驱动装置驱动两所述第一夹爪相向各旋转90度时,两所述第一夹爪的所述转动块随着其中一所述第一夹爪的降低发生转动,使弯折后的屏蔽线一端位于所述电路板的上表面、另一端位于从所述电路板的下表面。
15.本发明相比于现有技术的有益效果是,牵引装置沿着屏蔽线的引出路径反方向向输送装置靠近,到位后将从输送装置输出的屏蔽线端部夹紧沿着引出路径回位,即可将屏蔽线拉出。然后第一夹爪随着载板沿着z轴下降夹紧屏蔽线,切割装置截断屏蔽线,接着第一夹爪再次随着载板沿着z轴下降移送屏蔽线,此时屏蔽线高度和电路板高度相同,然后旋转驱动装置驱动两第一夹爪相向各旋转90度以使屏蔽线的一端从电路板的上表面接触第一焊盘、屏蔽线的另一端从电路板的下表面靠近第二焊盘,最后激光头和送锡装置沿着x轴分别移动至第一焊盘和第二焊盘的上方进行焊接。在焊接上面的屏蔽线端部时,焊锡直接熔在第一焊盘上,在焊接下面的屏蔽线端部时,焊锡熔化后通过第二焊盘的过孔渗到下方实现连接。上述的技术方案,可以达到的有益效果是在焊接两端分别连接电路板两面的屏蔽线时提高了焊接效率,因为无需翻转电路板即可对屏蔽线两端进行焊接。
附图说明
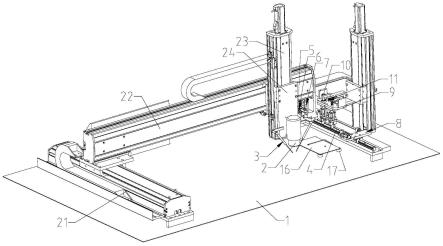
16.图1为背景技术中屏蔽线和电路板的位置关系图;图2为本发明实施方式提供的自动化激光焊接设备的第一结构示意图;图3为本发明实施方式提供的旋转驱动装置的结构示意图;图4为本发明实施方式提供的屏蔽线和电路板的位置关系图;
图5为本发明实施方式提供的顶升杆的位置示意图;图6为本发明实施方式提供的送锡装置的结构示意图;图7为本发明实施方式提供的输送装置和切割装置结构示意图;图8为本发明实施方式提供的自动化激光焊接设备的第二结构示意图;图9为本发明实施方式提供的两个第一夹爪的位置关系图。
17.图中:1、设备平台;2、激光头;3、送锡装置;31、第一安装架;32、第二安装架;33、第一送锡杆;34、第二送锡杆;4、屏蔽线;5、收卷装置;6、输送装置;7、切割装置;71、底座;72、过槽;73、截断气缸;74、切刀;8、牵引装置;81、牵引电缸;82、滑座;83、第二夹爪;9、载板;10、第一驱动轴;11、第二驱动轴;12、轴承;13、双螺旋纹;14、旋转驱动装置;141、齿轮;142、齿条;143、推进气缸;144、齿面;15、第一夹爪;151、夹块;152、转动块;153、线槽;16、电路板;17、垫座;18、第一焊盘;19、第二焊盘;20、顶升杆;21、y轴模组;22、x轴模组;23、z轴模组;24、安装板;25、主动轮;26、第一从动轮;27、第二从动轮;28、折板;29、升降模组。
具体实施方式
18.以下结合附图,对本发明上述的和另外的实施方式和优点进行清楚、完整地描述。显然,所描述的实施方式仅仅是本发明的部分实施方式,而不是全部实施方式。
19.在一种实施方式中,如图2-5所示。
20.本实施方式提供的自动化激光焊接设备,其包括设备平台1,设备平台1上设有能够沿着x轴、y轴、以及z轴移动的激光头2和送锡装置3,设备平台1上还设有用于收卷屏蔽线4的收卷装置5、用于输送屏蔽线4的输送装置6、用于切割屏蔽线4的切割装置7、以及用于牵引屏蔽线4的牵引装置8,收卷装置5、输送装置6、切割装置7、以及牵引装置8沿着屏蔽线4的引出路径依次排列,设备平台1上还设有能够独立于激光头2和送锡装置3沿着z轴移动的载板9,载板9上设有沿着屏蔽线4的引出路径并排的第一驱动轴10和第二驱动轴11,第一驱动轴10通过轴承12连接在载板9上,第二驱动轴11通过双螺旋纹13连接在载板9上,载板9上还设有用于驱动第一驱动轴10和第二驱动轴11相向各旋转90度的旋转驱动装置14,第二驱动轴11在旋转时沿着z轴高度降低,第一驱动轴10的底部和第二驱动轴11的底部均设有用于夹紧屏蔽线4的第一夹爪15,设备平台1上还设有供电路板16垫高的垫座17,电路板16的上表面设有第一焊盘18和带过孔的第二焊盘19,设备平台1上还设有位于第二焊盘19下方的顶升杆20;其中,牵引装置8将收卷于收卷装置5的屏蔽线4拉出,第一夹爪15随着载板9沿着z轴下降夹紧屏蔽线4,切割装置7截断屏蔽线4,第一夹爪15再次随着载板9沿着z轴下降移送屏蔽线4,旋转驱动装置14驱动两第一夹爪15相向各旋转90度以使屏蔽线4的一端从电路板16的上表面接触第一焊盘18、屏蔽线4的另一端从电路板16的下表面靠近第二焊盘19,顶升杆20上顶使屏蔽线4接触第二焊盘19,激光头2和送锡装置3沿着x轴分别移动至第一焊盘18和第二焊盘19的上方进行焊接。
21.在本实施方式中,和传统的激光焊接设备相同,激光头2和送锡装置3能够沿着x轴、y轴、以及z轴进行移动的。而为解决在焊接两端分别连接电路板16两面的屏蔽线4时如何提高焊接效率的技术问题,在本实施方式中,无需翻转电路板16即可对屏蔽线4两端进行焊接。具体的实施方式是牵引装置8沿着屏蔽线4的引出路径反方向向输送装置6靠近,到位后将从输送装置6输出的屏蔽线4端部夹紧沿着引出路径回位,即可将屏蔽线4拉出。然后第
一夹爪15随着载板9沿着z轴下降夹紧屏蔽线4,切割装置7截断屏蔽线4,接着第一夹爪15再次随着载板9沿着z轴下降移送屏蔽线4,此时屏蔽线4高度和电路板16高度相同,然后旋转驱动装置14驱动两第一夹爪15相向各旋转90度以使屏蔽线4的一端从电路板16的上表面接触第一焊盘18、屏蔽线4的另一端从电路板16的下表面靠近第二焊盘19,因为旋转驱动装置14驱动通过轴承12实现连接的相应第一夹爪15仅在平面旋转,而驱动通过双螺旋纹13实现连接的相应第一夹爪15在旋转时同步完成下降,因此可使弯折后的屏蔽线4一端位于电路板16的上表面、另一端位于从电路板16的下表面。然后通过顶升杆20上顶使屏蔽线4接触第二焊盘19,最后激光头2和送锡装置3沿着x轴分别移动至第一焊盘18和第二焊盘19的上方进行焊接。在焊接上面的屏蔽线4端部时,焊锡直接熔在第一焊盘18上,在焊接下面的屏蔽线4端部时,焊锡熔化后通过第二焊盘19的过孔渗到下方实现连接。通过上述的技术方案,可以达到的有益效果是在焊接两端分别连接电路板16两面的屏蔽线4时提高了焊接效率,因为无需翻转电路板16即可对屏蔽线4两端进行焊接。
22.在一种实施方式中,如图6所示。
23.本实施方式提供的自动化激光焊接设备,其送锡装置3包括分别设于激光头2两侧的第一安装架31和第二安装架32,第一安装架31上设有第一送锡杆33,第二安装架32上设有第二送锡杆34,第一送锡杆33和第二送锡杆34分别从激光头2两侧将焊锡丝向激光头2下方汇聚。
24.在本实施方式中,通过采取双向送锡,即将激光头2两侧的第一送锡杆33和第二送锡杆34的焊锡丝向激光头2下方汇聚。在激光头2照射下,两侧的焊锡丝熔化实现焊接。相较于单侧送锡,双向送锡可以使焊锡更匀。
25.在一种实施方式中,如图2所示。
26.本实施方式提供的自动化激光焊接设备,其设备平台1上设有y轴模组21,y轴模组21上设有x轴模组22,x轴模组22上设有z轴模组23,z轴模组23上设有安装板24,激光头2和送锡装置3设于安装板24上。
27.在本实施方式中,提供的y轴模组21、x轴模组22、以及z轴模组23来使激光头2和送锡装置3能够沿着x轴、y轴、以及z轴进行移动。
28.在一种实施方式中,如图7所示。
29.本实施方式提供的自动化激光焊接设备,其输送装置6包括位于屏蔽线4下方的主动轮25和位于屏蔽线4上方的第一从动轮26和第二从动轮27,第一从动轮26、主动轮25、以及第二从动轮27沿着屏蔽线4的引出路径依次排列。
30.在本实施方式中,其中的主动轮25连接有驱动电机,第一从动轮26和第二从动轮27的作用是和主动轮25咬合卡紧屏蔽线4,然后在主动轮25的作用下将屏蔽线4送出。
31.在一种实施方式中,如图7所示。
32.本实施方式提供的自动化激光焊接设备,其切割装置7包括底座71,底座71上设有过槽72,过槽72提供屏蔽线4穿过,切割装置7还包括位于底座71上方的截断气缸73,截断气缸73的动作轴上设有伸入过槽72的切刀74。
33.在本实施方式中,通过切割装置7可以实现将屏蔽线4截断,屏蔽线4从过槽72伸出,在截断气缸73的作用下,切刀74下压将屏蔽线4截断。
34.在一种实施方式中,如图8所示。
35.本实施方式提供的自动化激光焊接设备,其牵引装置8包括沿着y轴设在y轴模组21的底座上的牵引电缸81,牵引电缸81的输出端连接有滑座82,滑座82上设有用于夹紧屏蔽线4的第二夹爪83。
36.在本实施方式中,在牵引电缸81的驱动下,可以使第二夹爪83靠近输送装置6将输出的屏蔽线4端部夹紧沿着引出路径拉出屏蔽线4。
37.在一种实施方式中,如图8所示。
38.本实施方式提供的自动化激光焊接设备,其x轴模组22的一侧通过折板28连接有升降模组29,载板9设于升降模组29上。
39.在本实施方式中,提供了一种x轴模组22和升降模组29的连接结构,当x轴模组22沿着y轴移动时,升降模组29也随同沿着y轴移动。
40.在一种实施方式中,如图3所示。
41.本实施方式提供的自动化激光焊接设备,其旋转驱动装置14包括设于第一驱动轴10端部和第二驱动轴11端部的齿轮141,两齿轮141之间设有齿条142,载板9上设有用于驱动齿条142移动的推进气缸143,当齿条142推进时驱动两齿轮141同时转动。
42.在本实施方式中,推进气缸143驱动两齿轮141同时转动,若其中一个顺时针转动,对应着其中另一个逆时针转动。
43.在一种实施方式中,如图3所示。
44.本实施方式提供的自动化激光焊接设备,其齿条142接近于y形并且两侧设有齿面144,齿条142通过两侧的齿面144分别和两齿轮141啮合。
45.在本实施方式中,提供了齿条142的一种具体结构,当然该齿条142不限于接近于y形的此种结构。
46.在一种实施方式中,如图9所示。
47.本实施方式提供的自动化激光焊接设备,其第一夹爪15包括相对的两个夹块151,夹块151上可转动连接有转动块152,转动块152上开设有供屏蔽线4配合的线槽153;当两第一夹爪15夹紧屏蔽线4时,屏蔽线4嵌入线槽153内,当旋转驱动装置14驱动两第一夹爪15相向各旋转90度时,两第一夹爪15的转动块152随着其中一第一夹爪15的降低发生转动,使弯折后的屏蔽线4一端位于电路板16的上表面、另一端位于从电路板16的下表面。
48.在本实施方式中,当两第一夹爪15夹紧屏蔽线4时,屏蔽线4嵌入线槽153内,当旋转驱动装置14驱动两第一夹爪15相向各旋转90度时,一个第一夹爪15(设有轴承12的第一夹爪)平转,另一个第一夹爪15(设有双螺旋纹13的第一夹爪)转动同时下降。那么设有轴承12的第一夹爪15的转动块152和设有轴承12的第一夹爪15的转动块152以相反的转向发生转动,使得屏蔽线4一端朝上偏斜,另一端朝下偏斜,因此达到使弯折后的屏蔽线4一端位于电路板16的上表面、另一端位于电路板16的下表面的有益效果。
49.以上所述的具体实施方式,对本发明的发明目的、技术方案、以及有益效果进行了进一步的详细说明。应当理解,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围。特别指出,对于本领域技术人员而言,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1