具有夹持机构的建筑钢结构施工焊接装置的制作方法
1.本发明涉及建筑焊接设备技术领域,具体是涉及具有夹持机构的建筑钢结构施工焊接装置。
背景技术:
2.钢结构建筑是一种新型的建筑体系,打通房地产业、建筑业、冶金业之间的行业界线,集合成为一个新的产业体系,这就是业内人士普遍看好的钢结构建筑体系。
3.钢结构建筑相比传统的混凝土建筑而言,用钢板或型钢替代了钢筋混凝土,强度更高,抗震性更好。并且由于构件可以工厂化制作,现场安装,因而大大减少工期。由于钢材的可重复利用,可以大大减少建筑垃圾,更加绿色环保,因而被世界各国广泛采用,应用在工业建筑和民用建筑中。
4.钢结构建筑在高层、超高层建筑上的运用日益成熟,逐渐成为主流的建筑工艺,是未来建筑的发展方向。
5.在建筑工程施工过程中需要钢结构增加建筑的强度以及搭建平台,其中经常需要使用到一些钢板进行搭建,在焊接时需要将两块钢板拼成不同的角度,而现有装置对其进行固定后,进行焊接的角度无法控制,人工在焊接过程中有时会十分吃力,从而也影响最终成品质量,以及两块钢板焊接合为一块钢板时,工作人员需要对两块钢板边缝贴合处进行焊接,由于需要不断调整站位以及固定点位置,所以造成工作效率低下,针对以上问题需要提出具有夹持机构的建筑钢结构施工焊接装置。
技术实现要素:
6.为解决上述技术问题。
7.本技术提供了具有夹持机构的建筑钢结构施工焊接装置,包括有支撑台架;以及主板固定机构,主板固定机构设置于支撑台架的活动端;以及副板控制模块,有两个,两个副板控制模块对称设置于支撑台架的活动端并与其可转动连接;以及对接角控制机构,对接角控制机构设置于支撑台架上,对接角控制机构的输出端与两个副板控制模块的受力端传动连接;以及焊角控制机构,焊角控制机构设置于支撑台架上,焊角控制机构的输出端与支撑台架的活动端连接;以及焊缝对位模块,焊缝对位模块设置于支撑台架上,焊缝对位模块非工作状态下其输出端低于支撑台架顶面。
8.优选的,支撑台架包括有顶面板;以及滚轮,滚轮排列设置于顶面板上;以及底座,顶面板的一侧与底座铰接,焊角控制机构设置于底座上,焊角控制机构的输出端与顶面板连接。
9.优选的,主板固定机构包括有第一导向杆,第一导向杆设置于顶面板的底部并与其固定连接;以及第一螺纹杆,第一螺纹杆设置于顶面板的底部并与其可转动连接;以及第一伺服电机,第一伺服电机设置于顶面板的底部,第一伺服电机的输出端设有第一锥齿轮,第一螺纹杆上设有第二锥齿轮,第一锥齿轮与第二锥齿轮啮合;以及夹紧组件,有两个,两
个夹紧组件分别处于顶面板的两侧,第一导向杆与夹紧组件的非工作部滑动连接,第一螺纹杆与夹紧组件的非工作部螺纹连接。
10.优选的,夹紧组件包括有活动板,活动板与第一导向杆滑动连接,并且活动板与第一螺纹杆螺纹连接;以及压紧板,压紧板上对称设有第一限位杆,第一限位杆与活动板滑动连接;以及弹簧,第一限位杆上套设有弹簧,弹簧的两端分别抵触活动板和压紧板。
11.优选的,副板控制模块包括有高度升起机构,高度升起机构设置于顶面板的一侧并与其可转动连接,对接角控制机构的输出端与高度升起机构传动连接;以及横向控制机构,横向控制机构设置于高度升起机构的输出端;以及夹紧控制机构,夹紧控制机构设置于横向控制机构的输出端。
12.优选的,夹紧控制机构包括有夹爪架,夹爪架上设有旋拧杆并与其可转动连接,旋拧杆贯穿并与其螺纹连接,夹爪架上设有第二限位杆并与其固定连接,旋拧杆贯穿并与其滑动连接;以及宽阔手指气缸,宽阔手指气缸设置于夹爪架上;以及第一夹板和第二夹板,第一夹板和第二夹板对称设置于夹爪架上并与其滑动连接,宽阔手指气缸的两个输出端分别与第一夹板和第二夹板连接。
13.优选的,对接角控制机构包括有驱动杆,驱动杆设置于顶面板的底部并与其可转动连接,高度升起机构设置于驱动杆的输出端;以及第二伺服电机,第二伺服电机设置于顶面板的底部并与其固定连接;以及第三锥齿轮,第三锥齿轮设置于第二伺服电机的输出端;以及第四锥齿轮,第四锥齿轮设置于驱动杆上,第三锥齿轮和第四锥齿轮啮合。
14.优选的,焊角控制机构包括有滑块,滑块设置于底座上并与其滑动连接;以及连杆,连杆的一端与顶面板底部铰接,连杆的另一端与滑块铰接;以及第二螺纹杆,第二螺纹杆设置于底座上,并且第二螺纹杆与滑块螺纹连接;以及第三伺服电机,第三伺服电机设置于底座上,第三伺服电机的输出端与第二螺纹杆连接。
15.优选的,顶面板的一端设有第一阻挡气缸,顶面板的中部设有第一滑台,第一滑台的输出端设有第二阻挡气缸;以及焊缝对位模块包括有承载板,承载板的顶部设有真空吸盘,承载板的底部设有六棱杆;以及中心回转组件,承载板处于中心回转组件上方,并且中心回转组件的输出端与六棱杆连接;以及第二滑台,第二滑台设置于承载板上,中心回转组件设置于第二滑台的输出端。
16.优选的,中心回转组件包括有支架,支架设置于第二滑台的输出端,支架的内部设有蜗轮和蜗杆,蜗轮套设于六棱杆上并与其滑动连接,并且蜗轮与支架可转动连接,蜗杆与支架可转动连接,蜗轮与蜗杆啮合;以及第四伺服电机,第四伺服电机设置于支架上,并且第四伺服电机的输出端与蜗杆连接;以及电动推杆,电动推杆设置于支架上,电动推杆的输出端与六棱杆连接。
17.本发明与现有技术相比具有的有益效果是:1.本技术通过支撑台架、主板固定机构、副板控制模块、对接角控制机构、焊角控制机构和焊缝对位模块的设置,实现了两块钢板的平面焊接、角度焊接和拼合焊接的固定过程,并且可以调整焊接角度,保证焊接的质量效果,以及减少工作人员的走动提高工作效率;2.本技术通过高度升起机构、横向控制机构、夹紧控制机构和对接角控制机构的设置,可以完成对副钢板的固定,并且控制副钢板与主钢板之间的角度和位置;
3.本技术通过滑块、连杆、第二螺纹杆和第三伺服电机的设置,使得两块钢板之间的夹角始终朝向正上方,避免工作人员多角度弯腰导致过度疲劳影响焊接质量;4.本技术通过承载板、中心回转组件和第二滑台的设置,实现了工作人员减少走动,避免围绕钢板进行焊接的过程,减少不必要的时间浪费。
附图说明
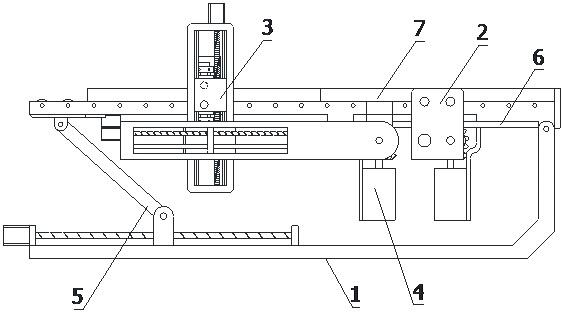
18.图1为本发明的立体结构示意图一;图2为本发明的立体结构示意图二;图3为本发明的主视图;图4为本发明的支撑台架、焊角控制机构和焊缝对位模块的立体结构示意图;图5为本发明的支撑台架、主板固定机构和焊缝对位模块的立体结构示意图一;图6为本发明的支撑台架、主板固定机构和焊缝对位模块的立体结构示意图二;图7为图6的a处放大图;图8为本发明的顶面板、副板控制模块、对接角控制机构和焊缝对位模块的立体结构示意图;图9为图8的b处放大图;图10为本发明的副板控制模块的立体结构示意图;图11为本发明的支撑台架和焊角控制机构的主视图;图12为本发明的支撑台架、焊角控制机构和焊缝对位模块的俯视图;图13为本发明的承载板和中心回转组件的主视图;图14为图13的c-c方向剖视图;图15为图13的d-d方向剖视图。
19.图中标号为:1-支撑台架;1a-顶面板;1a1-第一阻挡气缸;1a2-第一滑台;1a3-第二阻挡气缸;1b-滚轮;1c-底座;2-主板固定机构;2a-第一导向杆;2b-第一螺纹杆;2b1-第二锥齿轮;2c-第一伺服电机;2c1-第一锥齿轮;2d-夹紧组件;2d1-活动板;2d2-压紧板;2d3-第一限位杆;2d4-弹簧;3-副板控制模块;3a-高度升起机构;3b-横向控制机构;3c-夹紧控制机构;3c1-夹爪架;3c2-旋拧杆;3c3-第二限位杆;3c4-宽阔手指气缸;3c5-第一夹板;3c6-第二夹板;4-对接角控制机构;4a-驱动杆;4b-第二伺服电机;4c-第三锥齿轮;4d-第四锥齿轮;5-焊角控制机构;5a-滑块;5b-连杆;5c-第二螺纹杆;5d-第三伺服电机;6-焊缝对位模块;6a-承载板;6a1-六棱杆;6b-中心回转组件;6b1-支架;6b2-蜗轮;6b3-蜗杆;6b4-第四伺服电机;6b5-电动推杆;6c-第二滑台;7-钢板。
具体实施方式
20.以下描述用于揭露本发明以使本领域技术人员能够实现本发明。以下描述中的优
选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。
21.如图1、图2和图3所示,提供以下优选技术方案:具有夹持机构的建筑钢结构施工焊接装置,包括有支撑台架1;以及主板固定机构2,主板固定机构2设置于支撑台架1的活动端;以及副板控制模块3,有两个,两个副板控制模块3对称设置于支撑台架1的活动端并与其可转动连接;以及对接角控制机构4,对接角控制机构4设置于支撑台架1上,对接角控制机构4的输出端与两个副板控制模块3的受力端传动连接;以及焊角控制机构5,焊角控制机构5设置于支撑台架1上,焊角控制机构5的输出端与支撑台架1的活动端连接;以及焊缝对位模块6,焊缝对位模块6设置于支撑台架1上,焊缝对位模块6非工作状态下其输出端低于支撑台架1顶面;具体的,为了解决控制钢板焊接角度的技术问题,首先工作人员将主钢板放置于支撑台架1的活动端,主板固定机构2开始工作,主板固定机构2的输出端合拢并对主钢板的两侧进行夹紧固定,然后再将副钢板放置于支撑台架1的活动端,副钢板处于主钢板的一侧,两个副板控制模块3开始工作,两个副板控制模块3的输出端分别将副钢板的两侧夹紧固定,然后对接角控制机构4开始工作,对接角控制机构4的输出端驱动两个副板控制模块3向上扬起,两个副板控制模块3带动副钢板垂直于主钢板顶面或者呈角度设置,此时需要配合焊接角度来调整支撑台架1活动端的平面角度,使得两个钢板之间的夹角处于垂直向上,以便于配合焊接的过程,焊缝对位模块6开始工作,焊缝对位模块6的输出端驱动支撑台架1平面角度改变,直至焊接结束后,主板固定机构2和两个副板控制模块3停止对两块钢板的固定,工作人员将成品取下,当需要对两块钢板进行合并时,工作人员将副钢板放置于主钢板顶部,主板固定机构2的输出端将两块钢板的两侧夹紧固定,工作人员站在支撑台架1的一侧对两块钢板边缝的贴合处进行焊接,当完成一处边缝焊接后,焊缝对位模块6便快速驱动两块钢板完成一定角度的旋转,使得第二处等待焊接处面对工作人员,直至两块钢板的一圈边缝处都焊接完成。
22.如图4所示,提供以下优选技术方案:支撑台架1包括有顶面板1a;以及滚轮1b,滚轮1b排列设置于顶面板1a上;以及底座1c,顶面板1a的一侧与底座1c铰接,焊角控制机构5设置于底座1c上,焊角控制机构5的输出端与顶面板1a连接;具体的,为了解决对钢板支撑的技术问题,通过顶面板1a对钢板进行支撑,为了避免在钢板固定前需要调整其位置十分困难,通过顶面板1a上设置的滚轮进行辅助,通过焊角控制机构5调整顶面板1a的平面角度,从而带动其顶部的钢板随其改变角度来调整两块钢板之间夹角的朝向,使得工作人员直接对其夹角处焊接,当焊接完成后,主板固定机构2和两个副板控制模块3停止对钢板的固定,并使顶面板1a处于倾斜面让焊接完成后的钢板沿第二伺服电机4b滑出。
23.如图5和图6所示,提供以下优选技术方案:主板固定机构2包括有第一导向杆2a,第一导向杆2a设置于顶面板1a的底部并与其固定连接;以及第一螺纹杆2b,第一螺纹杆2b设置于顶面板1a的底部并与其可转动连接;以及第一伺服电机2c,第一伺服电机2c设置于顶面板1a的底部,第一伺服电机2c的输出端设有第一锥齿轮2c1,第一螺纹杆2b上设有第二锥齿轮2b1,第一锥齿轮2c1与第二锥齿轮2b1啮合;以及夹紧组件2d,有两个,两个夹紧组件2d分别处于顶面板1a的两侧,第一导向杆
2a与夹紧组件2d的非工作部滑动连接,第一螺纹杆2b与夹紧组件2d的非工作部螺纹连接;具体的,为了解决对主钢板固定的技术问题,工作人员将主钢板放置于顶面板1a的顶部,第一伺服电机2c的输出端带动第一锥齿轮2c1转动,第一锥齿轮2c1通过第二锥齿轮2b1带动第一螺纹杆2b转动,第一螺纹杆2b的两端设有对向螺纹,第一螺纹杆2b带动两个夹紧组件2d沿第一导向杆2a互相靠近,通过两个夹紧组件2d将钢板夹紧固定。
24.如图6和图7和所示,提供以下优选技术方案:夹紧组件2d包括有活动板2d1,活动板2d1与第一导向杆2a滑动连接,并且活动板2d1与第一螺纹杆2b螺纹连接;以及压紧板2d2,压紧板2d2上对称设有第一限位杆2d3,第一限位杆2d3与活动板2d1滑动连接;以及弹簧2d4,第一限位杆2d3上套设有弹簧2d4,弹簧2d4的两端分别抵触活动板2d1和压紧板2d2;具体的,为了解决对主钢板固定的技术问题,第一伺服电机2c的输出端带动第一锥齿轮2c1转动,第一锥齿轮2c1通过第二锥齿轮2b1带动第一螺纹杆2b转动,第一螺纹杆2b带动两个活动板2d1沿第一导向杆2a互相靠近,最终通过主钢板两侧的压紧板2d2将其夹紧固定,第一限位杆2d3用于对压紧板2d2进行支撑和移动方向的引导,弹簧2d4用于对压紧板2d2进行缓冲。
25.如图8所示,提供以下优选技术方案:副板控制模块3包括有高度升起机构3a,高度升起机构3a设置于顶面板1a的一侧并与其可转动连接,对接角控制机构4的输出端与高度升起机构3a传动连接;以及横向控制机构3b,横向控制机构3b设置于高度升起机构3a的输出端;以及夹紧控制机构3c,夹紧控制机构3c设置于横向控制机构3b的输出端;具体的,为了解决控制副钢板位置和角度的技术问题,副钢板放置于顶面板1a的顶部,并且副钢板处于主钢板旁侧,副钢板两侧通过两个夹紧控制机构3c夹紧固定,对接角控制机构4的输出端带动高度升起机构3a转动使副钢板处于主钢板上方,转动角度与根据两个钢板的组成情况决定,根据副钢板处于主钢板表面位置来控制横向控制机构3b作业,最后高度升起机构3a控制副钢板下降使其边缘与主钢板表面接触,高度升起机构3a和横向控制机构3b均为直线驱动器。
26.如图10所示,提供以下优选技术方案:夹紧控制机构3c包括有夹爪架3c1,夹爪架3c1上设有旋拧杆3c2并与其可转动连接,旋拧杆3c2贯穿3b2并与其螺纹连接,夹爪架3c1上设有第二限位杆3c3并与其固定连接,旋拧杆3c2贯穿3b2并与其滑动连接;以及宽阔手指气缸3c4,宽阔手指气缸3c4设置于夹爪架3c1上;以及第一夹板3c5和第二夹板3c6,第一夹板3c5和第二夹板3c6对称设置于夹爪架3c1上并与其滑动连接,宽阔手指气缸3c4的两个输出端分别与第一夹板3c5和第二夹板3c6连接;具体的,为了解决对副钢板夹紧固定的技术问题,工作人员扭动旋拧杆3c2使夹爪架3c1靠近副钢板边缘,直至副钢板处于第一夹板3c5和第二夹板3c6之间,宽阔手指气缸3c4的两个输出端驱动第一夹板3c5和第二夹板3c6互相靠近将副钢板夹紧固定,第二限位杆3c3用于对夹爪架3c1的移动方向进行引导。
27.如图8和图9所示,提供以下优选技术方案:对接角控制机构4包括有驱动杆4a,驱动杆4a设置于顶面板1a的底部并与其可转
动连接,高度升起机构3a设置于驱动杆4a的输出端;以及第二伺服电机4b,第二伺服电机4b设置于顶面板1a的底部并与其固定连接;以及第三锥齿轮4c,第三锥齿轮4c设置于第二伺服电机4b的输出端;以及第四锥齿轮4d,第四锥齿轮4d设置于驱动杆4a上,第三锥齿轮4c和第四锥齿轮4d啮合;具体的,为了解决控制钢板夹角的技术问题,对接角控制机构4开始工作,第二伺服电机4b带动第三锥齿轮4c转动,第三锥齿轮4c通过第四锥齿轮4d带动驱动杆4a转动,驱动杆4a带动顶面板1a两侧的高度升起机构3a向上转动,间接带动副钢板处于主钢板上方,转动角度与根据两个钢板的组成情况决定。
28.如图11所示,提供以下优选技术方案:焊角控制机构5包括有滑块5a,滑块5a设置于底座1c上并与其滑动连接;以及连杆5b,连杆5b的一端与顶面板1a底部铰接,连杆5b的另一端与滑块5a铰接;以及第二螺纹杆5c,第二螺纹杆5c设置于底座1c上,并且第二螺纹杆5c与滑块5a螺纹连接;以及第三伺服电机5d,第三伺服电机5d设置于底座1c上,第三伺服电机5d的输出端与第二螺纹杆5c连接;具体的,为了解决控制焊接角度的技术问题,当两块钢板被固定于顶面板1a上方时,如果两块钢板处于同水平面贴合时,焊角控制机构5便无需工作,当副钢板架设于主钢板上时,根据之间夹角情况对顶面板1a倾斜角度进行控制,使得两块钢板之间的夹角朝向正上方,第三伺服电机5d的输出端带动第二螺纹杆5c转动,第二螺纹杆5c带动滑块5a移动,滑块5a通过连杆5b带动顶面板1a下斜或上扬,顶面板1a带动其上方的钢板一同变换角度。
29.如图12和图13所示,提供以下优选技术方案:顶面板1a的一端设有第一阻挡气缸1a1,顶面板1a的中部设有第一滑台1a2,第一滑台1a2的输出端设有第二阻挡气缸1a3;以及焊缝对位模块6包括有承载板6a,承载板6a的顶部设有真空吸盘,承载板6a的底部设有六棱杆6a1;以及中心回转组件6b,承载板6a处于中心回转组件6b上方,并且中心回转组件6b的输出端与六棱杆6a1连接;以及第二滑台6c,第二滑台6c设置于承载板6a上,中心回转组件6b设置于第二滑台6c的输出端;具体的,为了解决找准钢板中心点并转动方位的技术问题,两块钢板均架设于顶面板1a上时一端需抵触至第一阻挡气缸1a1的输出端,然后第一滑台1a2驱动输出端伸出的第二阻挡气缸1a3靠近两块钢板的另一端,副板控制模块3的输出端将两块钢板的两侧固定,根据第一阻挡气缸1a1和第一滑台1a2之间的距离计算钢板中心点位置,第二滑台6c输出端通过中心回转组件6b带动承载板6a处于钢板中心点下方,焊接前第一阻挡气缸1a1和第一滑台1a2均脱离对钢板的限制,避免影响焊接过程,当完成一条边缝焊接后,主板固定机构2松开对钢板的固定,通过气泵将真空吸盘内抽至负压,使得真空吸盘与钢板紧密连接,然后中心回转组件6b通过六棱杆6a1驱动承载板6a转动一定角度,承载板6a通过真空吸盘带动两块钢板转动,使得下一条未焊接边缝处于工作人员处,主板固定机构2再次对钢板进行固定,工作人员对边缝进行焊接。
30.如图13至图15所示,提供以下优选技术方案:中心回转组件6b包括有支架6b1,支架6b1设置于第二滑台6c的输出端,支架6b1的内部设有蜗轮6b2和蜗杆6b3,蜗轮6b2套设于六棱杆6a1上并与其滑动连接,并且蜗轮6b2与支架6b1可转动连接,蜗杆6b3与支架6b1可转动连接,蜗轮6b2与蜗杆6b3啮合;以及第四伺服电机6b4,第四伺服电机6b4设置于支架6b1上,并且第四伺服电机6b4的输出端与蜗杆6b3
连接;以及电动推杆6b5,电动推杆6b5设置于支架6b1上,电动推杆6b5的输出端与六棱杆6a1连接;具体的,为了解决驱动两块钢板转动方位的技术问题,当工作人员完成一条边缝焊接后,主板固定机构2松开对钢板的固定,电动推杆6b5推动六棱杆6a1使承载板6a上升,直至真空吸盘贴近钢板底部,通过气泵将真空吸盘内抽至负压,使得真空吸盘与钢板紧密连接,然后第四伺服电机6b4的输出端带动蜗杆6b3转动,蜗杆6b3通过蜗轮6b2带动六棱杆6a1转动,六棱杆6a1驱动承载板6a转动一定角度,承载板6a通过真空吸盘带动两块钢板转动,使得下一条未焊接边缝处于工作人员处,主板固定机构2再次对钢板进行固定,工作人员对边缝进行焊接。
31.本技术通过支撑台架1、主板固定机构2、副板控制模块3、对接角控制机构4、焊角控制机构5和焊缝对位模块6的设置,实现了两块钢板的平面焊接、角度焊接和拼合焊接的固定过程,并且可以调整焊接角度,保证焊接的质量效果,以及减少工作人员的走动提高工作效率。
32.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明的范围内。本发明要求的保护范围由所附的权利要求书及其等同物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1