一种用于激光机器人的传动机构、支臂模块及激光机器人的制作方法
1.本发明涉及到机械手领域,具体涉及一种用于激光机器人的传动机构、支臂模块及激光机器人。
背景技术:
2.针对于逐级机械臂依次连接的串联式机器人,如需将该类机器人应用于激光应用领域,如激光打标、激光烧结打印等场合,通常是将激光输出端直接设置在机器人的末端上,然后通过独立于机器人的外部传输机构进行激光的传导。实际实施中,位于机器人外部的激光传输机构容易与机器人本身的运动发生干涉,容易导致加工中断,影响生产。
技术实现要素:
3.为了克服现有机器人在激光应用领域的限制,本发明提供了一种用于激光机器人的传动机构、支臂模块及激光机器人,该传动机构能够使得光能够在依靠该传动机构连接的两个物体之间进行内传导,有利于保证机器人在激光应用中的运行稳定性,具有良好的实用性。
4.相应的,本发明提供了一种用于激光机器人的传动机构,包括转轴单元、传动单元、光处理单元;
5.所述转轴单元包括支撑轴、第一转环和第二转环,所述光处理单元包括反射镜,所述反射镜的正面为反射面;
6.所述支撑轴的轴线沿竖直方向布置并保持固定,所述支撑轴包括自上向下依次设置的第一配合段和第二配合段;
7.所述第一转环配合在所述第一配合段上,所述反射镜固定在所述第一转环上;
8.所述第二转环包括自下向上依次设置的下配合部和光路部,所述下配合部转动配合在所述第二配合段上,所述光路部包围在所述反射镜外;
9.所述光路部上设置有位于同一高度上的进光槽和出光孔,所述进光槽和所述出光孔均分别贯穿所述第二转环的侧壁,所述出光孔的轴线垂直于所述支撑轴的轴线并与所述支撑轴的轴线相交,所述进光槽为沿所述第二转环圆周方向设置的弧面槽,所述进光槽在所述第二转环圆周方向上的弧度大小为预设值;
10.所述传动单元分别与所述第一转环和所述第二转环连接,通过所述传动单元,所述第二转环绕所述第一配合段的转动运动带动所述第一转环绕所述第二配合段根据预设传动比同转向运动;
11.所述反射镜沿竖直方向设置,所述支撑轴的轴线落于所述反射面上,所述第二转环和所述第一转环的预设传动比为2:1,所述反射面在所述第二转环绕所述第一配合段在预设行程范围内转动时,所述出光孔位于所述反射镜的正面一侧上;
12.或所述反射镜倾斜设置,所述支撑轴的轴线和所述出光孔的轴线所确立的参考平面与所述反射面垂直,所述支撑轴的轴线和所述出光孔的轴线的交点落于所述反射面上,
所述支撑轴的轴线和所述出光孔的轴线与所述反射面的夹角均为45
°
,所述第二转环和所述第一转环的预设传动比为1:1。
13.可选的实施方式,所述反射镜的透光率不等于零;于所述反射镜的背面一侧上设置有光感元件和/或热敏元件;
14.所述光感元件和/或热敏元件固定在所述第一转环上。
15.相应的,本发明提供了一种用于激光机器人的支臂模块,包括第一臂和所述的用于激光机器人的传动机构;
16.所述第一臂内沿轴向设置有光通道,所述第一臂的始端连接固定在所述第二转环上,且所述光通道与所述出光孔同轴连通。
17.可选的实施方式,还包括第二臂;
18.所述第二转环在光路部的上方还设置有上配合部,所述上配部为圆环状结构,所述上配合部和所述光路部同轴设置,所述第二臂的始端连接固定在所述上配合部上。
19.可选的实施方式,还包括驱动件;
20.所述驱动件用于通过所述第二臂驱动所述第二转环绕所述第一配合段转动。
21.可选的实施方式,所述第二臂的末端具有以所述第二转环的轴线为轴线设置的弧形实体结构;
22.所述弧形实体结构具有底面敞开的弧形槽,于所述弧形槽的其中一个侧壁上设置有贴合所述侧壁的弧形齿条;
23.所述驱动件的输出端为转动运动输出端,所述驱动件的输出端伸入至所述弧形槽中并与所述弧形齿条啮合配合。
24.可选的实施方式,还包括透镜,所述透镜设置在所述光通道中。
25.相应的,本发明提供了一种激光机器人,包括激光模块和所述的用于激光机器人的支臂模块,所述激光模块包括激光发生组件和激光调节组件,所述激光发生组件具有第一激光出口,所述激光调节组件具有第二激光入口和第二激光出口;
26.所述支臂模块的数量为n个,n为正整数,n个支臂模块分别依次命名为第i支臂模块,i=1,2,
……
,n;
27.在第1支臂模块中,所述反射镜倾斜设置,所述支撑轴的轴线和所述出光孔的轴线所确立的参考平面与所述反射面垂直,所述支撑轴的轴线和所述出光孔的轴线的交点落于所述反射面上,所述支撑轴的轴线和所述出光孔的轴线与所述反射面的夹角均为45
°
,所述第二转环和所述第一转环的预设传动比为1:1,所述第一激光出口位于所述反射面上方并朝向所述反射面,所述第一激光出口的朝向与所述支撑轴的轴线共线;
28.在i》1时,在第i支臂模块中,所述支撑轴固定在第i-1支臂模块的第一臂的末端上,所述进光槽与第i-1支臂模块中的第一臂的光通道连通,所述反射镜沿竖直方向设置,所述支撑轴的轴线落于所述反射面上,所述第二转环和所述第一转环的预设传动比为2:1,所述反射面在所述第二转环绕所述第一配合段在预设行程范围内转动时,所述出光孔位于所述反射镜的正面一侧上;
29.所述激光调节组件固定在所述第n支臂模块的第一臂的末端上,且所述第二激光入口与第n支臂模块的第一臂的光通道连通。
30.可选的实施方式,在i》1时,在第i支臂模块中,所述支臂模块还包括第二臂和驱动
件,所述第二转环在光路部的上方还设置有上配合部,所述上配部为圆环状结构,所述上配合部和所述光路部同轴设置,所述第二臂的始端连接固定在所述上配合部上;所述第二臂的末端具有以所述第二转环的轴线为轴线设置的弧形实体结构;所述弧形实体结构具有底面敞开的弧形槽,于所述弧形槽的其中一个侧壁上设置有贴合所述侧壁的弧形齿条;所述驱动件的输出端为转动运动输出端,所述驱动件的输出端伸入至所述弧形槽中并与所述弧形齿条啮合配合,所述驱动件的本体固定在第i-1支臂模块的第一臂上。
31.可选的实施方式,所述激光调节组件为振镜模块。
32.综上,本发明提供了一种用于激光机器人的传动机构、支臂模块及激光机器人,其主要设计思路为利用scara机器人的结构特性,将scara机器人的每一根支臂的内部用于对激光进行传导,避免了采用位于机器人外部的激光传输机构,防止机器人运动时可能发生的干涉问题,保证了scara机器人在激光领域的应用的运行可靠性。
附图说明
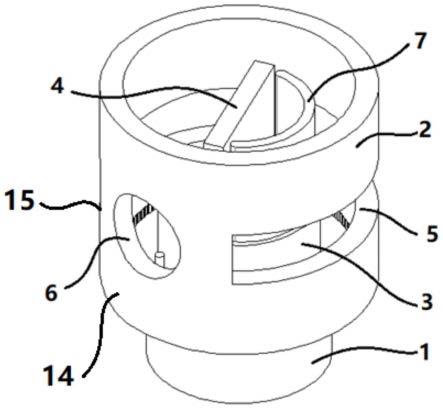
33.图1为本发明实施例一的传动机构三维结构示意图。
34.图2为本发明实施例一的传动机构俯视结构示意图。
35.图3为本发明实施例一的传动机构剖面结构示意图。
36.图4为本发明实施例一的沿竖直方向设置的反射镜的光路示意图。
37.图5为本发明实施例一的沿竖直方向设置的反射镜在不同状态下的光路示意图。
38.图6为本发明实施例一的倾斜设置的反射镜的光路示意图。
39.图7为本发明实施例二的用于激光机器人的支臂模块三维结构示意图。
40.图8为本发明实施例二的用于激光机器人的支臂模块俯视结构透视示意图。
41.图9为本发明实施例三的激光机器人三维结构示意图。
具体实施方式
42.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
43.实施例一:用于激光机器人的传动机构
44.图1示出了本发明实施例的传动机构三维结构示意图。
45.图2示出了本发明实施例的传动机构俯视结构示意图。
46.图3示出了本发明实施例的传动机构剖面结构示意图。
47.具体的,相应的,本发明提供了一种用于激光机器人的传动机构,包括转轴单元、传动单元8、光处理单元。
48.所述转轴单元包括支撑轴1、第一转环3和第二转环2,所述光处理单元包括反射镜4,所述反射镜4的正面为反射面13。
49.所述支撑轴1的轴线沿竖直方向布置并保持固定,所述支撑轴1包括自上向下依次设置的第一配合段11和第二配合段12;根据轴结构的业内定义,在非额外说明的条件下,轴的侧面均为圆周面。
50.所述第一转环3配合在所述第一配合段11上,所述反射镜4固定在所述第一转环3上,关于反射镜4的设置形式在后续进行说明。
51.所述第二转环2包括自下向上依次设置的下配合部14和光路部15,所述下配合部14转动配合在所述第二配合段12上,所述光路部15包围在所述反射镜4外。
52.所述光路部15上设置有位于同一高度上的进光槽5和出光孔6,所述进光槽5和所述出光孔6均分别贯穿所述第二转环2的侧壁,所述出光孔6的轴线垂直于所述支撑轴1的轴线并与所述支撑轴1的轴线相交,所述进光槽5为沿所述第二转环2圆周方向设置的弧面槽,所述进光槽5在所述第二转环2圆周方向上的弧度大小为预设值。
53.所述传动单元8分别与所述第一转环3和所述第二转环2连接,通过所述传动单元8,所述第二转环2绕所述第一配合段11的转动运动带动所述第一转环3绕所述第二配合段12根据预设传动比同转向运动。
54.具体的,根据传动机构在激光机器人中的应用位置的不同,反射镜4具有不同的设置方式。
55.反射镜4在第一种实施方式中,参考图4,图4示出了本发明实施例的反射镜4沿竖直方向设置的光路示意图,需要说明的是,图4的视角为俯视于所述传动机构的视角。所述反射镜4沿竖直方向设置,所述支撑轴1的轴线落于所述反射面13上,所述第二转环2和所述第一转环3的预设传动比为2:1,所述反射面13在所述第二转环2绕所述第一配合段11在预设行程范围内转动时,所述出光孔6位于所述反射镜4的正面一侧上。具体的,在图4中,光线从进光槽5进入经反射面13反射后进入出光孔6,具体的,光线从进光槽5进入的位置是根据激光机器人的设计结构决定的,一般的,在实际应用中,以外界作为参考性,光线进入的方向是固定的,但第二圆环,即出光孔6的朝向是变化的,相应的,为了保证反射的光线能够进入出光孔6,反射面13的朝向也要相应发生变化。
56.具体的,图5示出了沿竖直方向设置的反射镜4在不同状态下的光路示意图。关于反射面13与出光口的朝向的运动关系,为了准确说明,本发明实施例以状态一和状态二的对比进行说明。在状态一下,在图示视角,反射面13沿竖直方向布置,从进光槽5进入的光线垂直于反射面13,相对应得到,出射光线与入射光线的轨迹一致。需要说明的是,实际实施中,由于位置干涉的关系,进光槽5和出光孔6不可能在同一位置上,本发明实施例采用特殊光路例子进行说明,以便于理解。
57.相对应的,反射镜4在状态一切换至状态二,出射光线与入射光线的夹角为45
°
,相对应的,与状态一相比,为了满足光线在反射过程中入射角与出射角相等的客观规律,反射镜4需要同向(逆时针方向)转动22.5
°
。
58.在状态一和状态二中,入射光线的空间角度保持不变,出射光线的空空间角度变化实质与出光孔6的空间角度变化是一致的,相应的,出光孔6(第二圆环)绕支撑轴1轴线转动一定角度后,反射镜4需要同向转动对应角度的一半才能够满足光线的反射需求,相应的,所述第二转环2和所述第一转环3的预设传动比需满足2:1的条件。
59.反射镜4在第二种实施方式中,图6为倾斜设置的反射镜4的光路示意图。需要说明的是,图6的视角为正视于所述传动机构的视角。反射镜4在第二种实施方式中,所述反射镜4倾斜设置,所述支撑轴1的轴线和所述出光孔6的轴线所确立的参考平面与所述反射面13垂直,所述支撑轴1的轴线和所述出光孔6的轴线的交点落于所述反射面13上,所述支撑轴1
的轴线和所述出光孔6的轴线与所述反射面13的夹角均为45
°
,所述第二转环2和所述第一转环3的预设传动比为1:1。具体的,传动机构在该应用结构中,光线需从反射镜4的正上方(支撑轴1的轴线位置)入射,为了使反射光线能够进入出光孔6,反射面13需要与出光孔6时刻保持图示的对应关系,即反射面13需要与出光孔6和所述反射面13的正上面相对,所述反射面13与水平面夹角为45
°
,在第二转环2转动时,第一转环3需要同步按同样的角速度转动,相对应的,在该实施方式下,所述第二转环2和所述第一转环3的预设传动比为1:1。
60.具体的,关于传动单元8的设置形式,具体实施中需根据第一转环3和第二转环2的结构设置。具体的,在本发明实施例中第一转环3和第二转环2具有传动比(角速度)的比例限制,在本发明实施例中,第一圆环和第二圆环均做绕同一轴线的圆周运动,为了满足传动比的限制要求,需要结合二者的尺寸比例关系,然后利用传动单元8进行变速调节。
61.在本发明实施例中,所述第二转环2在对应于第一转环3的位置上加工有内齿9,第一转环3的外周加工有外齿10,根据外齿10和内齿9的啮合圆的比例关系,需要其之间设置传动单元8以调节二者之间的比例关系,使其满足传动比要求;传动单元8实质产生了变速的作用。
62.相对应的,在本发明实施例中,传动单元8可采用变速齿轮组结构,利用齿轮的组合,使第一转环3和第二转环2按照预设转速比同向运动,图中的齿轮结构仅用于示意传动单元8的设置位置,不表示实际的传动单元8结构,传动单元8结构需根据具体实施结构设计。
63.进一步的,所述反射镜4的透光率不等于零;于所述反射镜4的背面上设置有光感元件和/或热敏元件。所述光感元件和/或热敏元件固定在所述第一转环3上。具体的,在激光机器人应用中为了显示激光光路,一般会采用与激光发光机构同轴发射有色光的方式对光路进行示意,相应的,可通过有色光的光路判断激光光路是否准确,因此,可选的实施方式,所述反射镜4的透光率大于零,于所述反射镜4的背面上设置所述光感元件阵列;所述光感元件阵列包括若干个光感元件。
64.相类似的,可直接利用激光本身对光路进行判断,可选的实施方式,所述反射镜4的透光率大于零,于所述反射镜4的背面上设置热敏元件阵列,所述热敏元件阵列包括若干个热敏元件。
65.具体实施中,可在反射镜的背后设置弧面结构的阵列支架7,用于承载光感元件阵列和热敏元件阵列。
66.实施例二:用于激光机器人的支臂模块
67.图7示出了本发明实施例的用于激光机器人的支臂模块三维结构示意图,图8示出了本发明实施例的用于激光机器人的支臂模块俯视透视结构示意图。
68.在实施例一的基础上,相应的,本发明提供了一种用于激光机器人的支臂模块,包括第一臂21和所述的用于激光机器人的传动机构。
69.所述第一臂21内沿轴向设置有光通道27,所述第一臂21的始端连接固定在所述第二转环2上,且所述光通道27与所述出光孔6同轴连通。可选的实施方式,还包括第二臂23;所述第二转环2在光路部15的上方还设置有上配合部,所述第二臂23的始端连接固定在所述上配合部上。
70.在本发明实施例中,第一臂的末端设置有托架22,托架22用于连接后端的设备。
71.具体的,在支臂模块的应用中,传动机构的第二转环2上增设配合部用于连接第二臂23,增设第一臂21与出光孔6连通,光线可从出光孔6导出至第一臂21的光通道27中,对于支臂模块而言,光线从进光槽5或第二圆环的上方照射至反射镜4上,反射光线从出光孔6导出至第一臂21上,反射镜4随着第二转环2的运动而运动,使反射光线始终从出光孔6中导出;第一臂21可起到延长机臂长度的作用,而第二臂23可起到驱动臂的作用。
72.具体实施中,可选的实施方式,所述支臂模块还包括驱动件;
73.所述驱动件用于通过所述第二臂23驱动所述第二转环2绕所述第一配合段11转动。
74.可选的实施方式,所述第二臂23的末端具有以所述第二转环2的轴线为轴线设置的弧形实体结构24;所述弧形实体结构24具有底面敞开的弧形槽,于所述弧形槽的其中一个侧壁上设置有贴合所述侧壁的弧形齿条28;所述驱动件的输出端29为转动运动输出端,所述驱动件的输出端29伸入至所述弧形槽中并与所述弧形齿条28啮合配合。
75.可选的实施方式,还包括透镜,所述透镜设置在所述光通道27中。激光在光通道27的传递过程中,还可以通过透镜进行聚焦或散焦处理,以达到更好的激光处理效果。
76.实施例三:激光机器人
77.图9示出了本发明实施例的激光机器人三维结构示意图。
78.相应的,本发明提供了一种激光机器人,包括激光模块和所述的用于激光机器人的支臂模块,所述激光模块包括激光发生组件300和激光调节组件400,所述激光发生组件300具有第一激光出口,所述激光调节组件400具有第二激光入口和第二激光出口。
79.具体的,激光发生组件300可以为现有技术下的激光发生器,其能产生高能量的激光,并日通过第一激光出口进行出射;具体的,激光出射后,需要进行投射调节以满足功能需求,具体的,投射调节包括能量的汇聚、位置的精确调节等方面的内容,在本发明实施例中,激光调节组件400发挥相类似的作用,可根据现有技术实现。本发明实施例的发明内容主要针对激光在激光发生组件300和激光调节组件400之间的传输方面。
80.所述支臂模块的数量为n个,n为正整数,n个支臂模块分别依次命名为第i支臂模块,i=1,2,
……
,n;本发明实施例以n=2为例进行说明。相对应的,n个支臂模块分别为第1支臂模块100、第2支臂模块200。
81.结合前述实施例的说明,在第1支臂模块中,所述反射镜4倾斜设置,所述支撑轴1的轴线和所述出光孔6的轴线所确立的参考平面与所述反射面13垂直,所述支撑轴1的轴线和所述出光孔6的轴线的交点落于所述反射面13上,所述支撑轴1的轴线和所述出光孔6的轴线与所述反射面13的夹角均为45
°
,所述第二转环2和所述第一转环3的预设传动比为1:1,所述第一激光出口位于所述反射面13上方并朝向所述反射面13,所述第一激光出口的朝向与所述支撑轴1的轴线共线;
82.在i》1时,在第i支臂模块中,所述支撑轴1固定在第i-1支臂模块的第一臂21的末端上,所述进光槽5与第i-1支臂模块中的第一臂21的光通道27连通,所述反射镜4沿竖直方向设置,所述支撑轴1的轴线落于所述反射面13上,所述第二转环2和所述第一转环3的预设传动比为2:1,所述反射面13在所述第二转环2绕所述第一配合段11在预设行程范围内转动时,所述出光孔6位于所述反射镜4的正面一侧上;
83.所述激光调节组件400固定在所述第n支臂模块的第一臂21的末端上,且所述第二
激光入口与第n支臂模块的第一臂21的光通道27连通。
84.具体的,激光发生组件300产生的激光通过第1支臂模块的竖直上方导入,然后由反射镜4反射至第1支臂模块的第一臂21的光通道27上。然后根据排序,相对下一级的支臂模块通过进光槽5接收来自于相对上一级的第一臂21的光通道27中传递的光,相对下一级的支臂通过反射镜4反射至第一臂21上,依次类推直至光传递至最后一级的支臂模块的第一臂21。
85.于最后一级的支臂模块的第一臂21的末端上设置的激光调节结构对光进行处理后进行出射,执行相应的作业,如焊接、雕刻、蚀刻等。
86.可选的实施方式,在i》1时,在第i支臂模块中,所述支臂模块还包括第二臂23和驱动件,所述第二转环2在光路部15的上方还设置有上配合部20,所述第二臂23的始端连接固定在所述上配合部上;所述第二臂23的末端具有以所述第二转环2的轴线为轴线设置的弧形实体结构24;所述弧形实体结构24具有底面敞开的弧形槽,于所述弧形槽的其中一个侧壁上设置有贴合所述侧壁的弧形齿条28;所述驱动件的输出端29为转动运动输出端,所述驱动件的输出端29伸入至所述弧形槽中并与所述弧形齿条28啮合配合,所述驱动件的本体25固定在第i-1支臂模块的第一臂21上。具体的,在该实施结构下,每一个支臂模块的运动驱动件是固定在前一级支臂模块的第一臂21上的,通过该实施方式,可保证运动的同步性。
87.可选的实施方式,所述激光调节组件400为振镜模块。所述振镜模块主要用于在一定范围内调节出射光的轨迹。实际实施中,激光调节组件400还可以为反射镜4等光处理结构,其目的是根据所需功能,将激光输出调节至合适的状态以及调节激光输出的方向。
88.需要说明的是,本发明实施例的激光机器人的运动形式与scara机器人的运动形式相类似,均为串联式机械臂且机械臂之间的相对运动均为摆动运动,在此基础上,本发明实施例的激光机器人对机械臂之间的连接结构以及机械臂本身进行了再设计,以满足所需的功能需求,具体的,激光在传播过程中需要保证环境的清洁度,本发明实施例的示意图中的激光光路中存在着部分外露结构,具体实施中需要按需进行封闭。
89.具体的,本发明实施例的激光机器人有几个主要的应用领域,如打标领域、激光烧结3d打印领域、激光焊接领域等。
90.综上,本发明实施例提供了一种用于激光机器人的传动机构、支臂模块及激光机器人,其主要设计思路为利用scara机器人的结构特性,将scara机器人的每一根支臂的内部用于对激光进行传导,避免了采用位于机器人外部的激光传输机构,防止机器人运动时可能发生的干涉问题,保证了scara机器人在激光领域的应用的运行可靠性。
91.以上实施例的说明只是用于帮助理解本发明的方法及其核心思想,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1