一种具有螺栓复紧功能的攀爬作业平台及作业方法与流程
1.本发明涉及电力作业攀爬机器人领域,具体涉及一种具有螺栓复紧功能的攀爬作业平台及作业方法。
背景技术:
2.角钢塔是电力领域的重要设施,如图28、29所示的为现有技术中角钢塔的角钢主材a的示意图,角钢主材a截面为直角形,其外侧两面自下而上分布有多个脚钉a1,脚钉a1为杆状结构,且垂直于所述角钢主材a的外侧表面,相邻的两根角钢主材a之间通过直角形的连接板a2连接,连接板a2位于两根角钢主材a连接处的外侧,连接板a2通过螺栓与角钢主材a端部固定连接。电力角钢塔数量多、分布广,且长期显露于野外环境甚至多尘强风高湿的恶劣环境下,这使得在后续检修维护过程中,维护人员需要登高作业,并对电力角钢塔处连接螺栓进行复紧稳定。现有技术中,已经开发出多种用于电力角钢塔或其他高空作业所用的检修机器人,例如公开号为cn112356940a的中国发明专利申请公开了一种角钢塔用攀爬机器人,其能够依靠夹爪夹持在角钢上攀爬角钢塔,并在攀爬过程中通过张开夹爪避让角钢塔上的脚钉等障碍物,但是该夹爪张开角度有限,无法避让较长的脚钉,避让范围较小。该角钢塔用攀爬机器人在实际攀爬过程中通过v型块与夹爪配合,v型块通过v型槽压在角钢的棱边处,实现牢固夹持住角钢的目的。但是实际角钢与角钢端部之间通常通过连接板连接,即连接板会从两角钢连接处的棱边突出一部分,对攀爬机器人行进造成障碍,而现有技术中的v型块为固定式的,v型块本身无法避让角钢连接板,因此仅能够通过调整机器人的姿态来越过角钢连接板等障碍,结构较为复杂,动作不够灵活。再者,现有技术中的攀爬机器人多不具备螺栓复紧功能,电力角钢塔处连接螺栓的复紧仍需人力完成,危险系数高、劳动强度高,且滞空时间长,极易造成工作人员体力透支,从而进一步危害工作人员的身体健康,同时人力复紧维护方式效率低下。
技术实现要素:
3.本发明所要解决的技术问题在于:
4.现有技术中攀爬机器人不具备螺栓复紧功能的技术问题。
5.本发明是通过以下技术手段解决上述技术问题的:
6.一种具有螺栓复紧功能的攀爬作业平台,包括主机,所述主机上设置有夹持装置、螺栓复紧装置,所述主机、夹持装置能够沿待攀爬物体进行攀爬,所述螺栓复紧装置包括设置在主机上的延伸臂,所述延伸臂的端部设置有工作头,所述工作头的活动端设置有套筒,所述螺栓复紧装置能够对待攀爬物体上的螺栓进行旋拧。
7.本发明中的一种具有螺栓复紧功能的攀爬作业平台在实际应用时,主机及夹持装置能够携带螺栓复紧装置在待攀爬物体上攀爬,攀爬至需进行螺栓复紧位置时停止,螺栓复紧装置则对待攀爬物体上的螺栓进行旋拧,以实现复紧操作,相对于现有技术,该攀爬作业平台具有螺栓复紧功能,无需人力操作,安全性较好,劳动强度低,并且复紧效率较高。
8.优化的,所述延伸臂包括设置在主机上的底部框架,底部框架的端部设置有旋转组件,旋转组件的旋转轴线垂直于所述待攀爬物体,旋转组件的活动端设置有x轴位移机构,所述x轴位移机构活动端设置有y轴位移机构,y轴位移机构活动端的往复移动方向垂直于x轴位移机构活动端的往复移动方向,所述工作头设置在y轴位移机构活动端。
9.实际应用中,旋转组件能够带动x轴位移机构、y轴位移机构、工作头整体沿垂直于所述待攀爬物体的旋转轴线旋转,以调节工作头在待攀爬物体上的作业位置,x轴位移机构能够带动y轴位移机构、工作头整体往复运动,以调节工作头在待攀爬物体上的作业位置,y轴位移机构则能够带动工作头沿垂直于x轴位移机构方向往复移动,以控制工作头靠近或者远离待攀爬物体,满足复紧需求,该结构整体原理简单、动作灵活,能够满足将工作头调节至不同作业位置的需求。
10.优化的,所述x轴位移机构活动端的往复移动方向与旋转组件旋转轴线之间的夹角为45
°
。
11.将x轴位移机构活动端的往复移动方向与旋转组件旋转轴线之间的夹角设置为45
°
,能够确保在攀爬角钢主材等物体时,工作头垂直于角钢主材的侧面,以便对其表面的螺栓进行复紧,旋转组件转动时,则可将工作头调解至指向不同的侧面,满足对角钢主材不同侧面上螺栓的复紧需求。
12.优化的,所述底部框架滑动安装在主机上,底部框架的滑动方向平行于主机的攀爬方向。
13.底部框架相对于主机滑动时,能够将工作头伸缩至不同高度,以实现对不同位置螺栓的复紧操作,作业范围更广。
14.优化的,所述主机上设置有导轨,所述底部框架上设置有滑块,所述滑块滑动安装在所述导轨上,所述主机上设置有电机,所述电机通过带传动机构驱动底部框架往复滑动。
15.优化的,所述旋转组件包括设置在底部框架端部的旋转座,所述旋转座上转动安装有转盘,还包括设置在旋转座上的旋转电机,所述旋转电机通过涡轮蜗杆机构驱动所述转盘转动,所述x轴位移机构设置在所述转盘上。
16.实际应用中,旋转电机转动可通过涡轮蜗杆机构驱动所述转盘转动,以带动x轴位移机构等部件转动,并且由于涡轮蜗杆机构的自锁作用,即动力仅能够从旋转电机传输至转盘,因而x轴位移机构等部件转动之后能够稳定停留在预定位置,以确保作业位置固定不动,稳定性较好。
17.优化的,所述x轴位移机构包括设置在旋转组件活动端上的x轴机架,所述x轴机架上滑动安装有x轴动块、转动安装有x轴丝杆,还设置有同步电机,所述x轴动块与x轴丝杆通过螺纹连接,所述同步电机能够驱动x轴丝杆转动,所述y轴位移机构设置在所述x轴动块上。
18.实际应用中,同步电机驱动x轴丝杆转动时,x轴动块随之移动,进而实现y轴位移机构的位置调整,结构简单、动作可靠。
19.优化的,所述y轴位移机构包括y轴机架,所述y轴机架滑动安装在所述x轴位移机构的活动端,y轴机架上转动安装有y轴丝杆,y轴机架上还设置有与y轴丝杆连接的同步电机,所述y轴丝杆与所述x轴位移机构的活动端之间通过螺纹连接。
20.同步电机转动,驱动y轴丝杆转动,以带动整体y轴机架移动,实现位置调整,结构
简单、动作可靠。
21.优化的,所述工作头包括设置在所述延伸臂端部的打击座以及设置在打击座上的打击电机,打击座上转动安装有打击锚杆,所述打击电机能够驱动所述打击锚杆转动,所述套筒安装在所述打击锚杆上。
22.实际应用中,打击电机工作时,能够带动打击锚杆转动,进而带动套筒转动,以对螺栓旋拧进行复紧,确保复紧效果。
23.本发明还公开一种采用上述的一种具有螺栓复紧功能的攀爬作业平台的作业方法,所述夹持装置设置两个,其中一个夹持装置能够相对于主机往复滑动,另一个夹持装置固定安装在所述主机上,包括如下步骤:
24.s1、能够滑动的夹持装置夹持在待攀爬的物体上,固定的夹持装置的两爪杆张开;
25.s2、主机相对于能够滑动的夹持装置向上沿待攀爬的物体向上移动;
26.s3、主机向上移动停止后,固定的夹持装置夹持在待攀爬的物体上,能够滑动的夹持装置的两爪杆张开;
27.s4、能够滑动的夹持装置沿主机向上移动;
28.s5、能够滑动的夹持装置向上移动停止后,重复步骤s1-s5,此过程中,当主机带动螺栓复紧装置攀爬至需进行螺栓复紧的位置时,两个夹持装置均夹持在待攀爬的物体上,所述螺栓复紧装置对待攀爬物体上的螺栓进行旋拧。
29.本发明中的作业方法在实际应用时,通过两个夹持装置交替夹持、张开,能够顺利实现攀爬至需进行螺栓复紧的位置时,两个夹持装置均夹持在待攀爬的物体上,为复紧作业提供稳定支撑,所述螺栓复紧装置对待攀爬物体上的螺栓进行旋拧以实现复紧,攀爬方式简单、可靠,能够为复紧作业提供稳定支撑,复紧效果较好,作业效率高。
30.本发明的优点在于:
31.1.本发明中的一种具有螺栓复紧功能的攀爬作业平台在实际应用时,主机及夹持装置能够携带螺栓复紧装置在待攀爬物体上攀爬,攀爬至需进行螺栓复紧位置时停止,螺栓复紧装置则对待攀爬物体上的螺栓进行旋拧,以实现复紧操作,相对于现有技术,该攀爬作业平台具有螺栓复紧功能,无需人力操作,安全性较好,劳动强度低,并且复紧效率较高。
32.2.实际应用中,旋转组件能够带动x轴位移机构、y轴位移机构、工作头整体沿垂直于所述待攀爬物体的旋转轴线旋转,以调节工作头在待攀爬物体上的作业位置,x轴位移机构能够带动y轴位移机构、工作头整体往复运动,以调节工作头在待攀爬物体上的作业位置,y轴位移机构则能够带动工作头沿垂直于x轴位移机构方向往复移动,以控制工作头靠近或者远离待攀爬物体,满足复紧需求,该结构整体原理简单、动作灵活,能够满足将工作头调节至不同作业位置的需求。
33.3.将x轴位移机构活动端的往复移动方向与旋转组件旋转轴线之间的夹角设置为45
°
,能够确保在攀爬角钢主材等物体时,工作头垂直于角钢主材的侧面,以便对其表面的螺栓进行复紧,旋转组件转动时,则可将工作头调解至指向不同的侧面,满足对角钢主材不同侧面上螺栓的复紧需求。
34.4.底部框架相对于主机滑动时,能够将工作头伸缩至不同高度,以实现对不同位置螺栓的复紧操作,作业范围更广。
35.5.实际应用中,旋转电机转动可通过涡轮蜗杆机构驱动所述转盘转动,以带动x轴
位移机构等部件转动,并且由于涡轮蜗杆机构的自锁作用,即动力仅能够从旋转电机传输至转盘,因而x轴位移机构等部件转动之后能够稳定停留在预定位置,以确保作业位置固定不动,稳定性较好。
36.6.实际应用中,同步电机驱动x轴丝杆转动时,x轴动块随之移动,进而实现y轴位移机构的位置调整,结构简单、动作可靠。
37.7.同步电机转动,驱动y轴丝杆转动,以带动整体y轴机架移动,实现位置调整,结构简单、动作可靠。
38.8.实际应用中,打击电机工作时,能够带动打击锚杆转动,进而带动套筒转动,以对螺栓旋拧进行复紧,确保复紧效果。
39.9.本发明中的作业方法在实际应用时,通过两个夹持装置交替夹持、张开,能够顺利实现攀爬至需进行螺栓复紧的位置时,两个夹持装置均夹持在待攀爬的物体上,为复紧作业提供稳定支撑,所述螺栓复紧装置对待攀爬物体上的螺栓进行旋拧以实现复紧,攀爬方式简单、可靠,能够为复紧作业提供稳定支撑,复紧效果较好,作业效率高。
附图说明
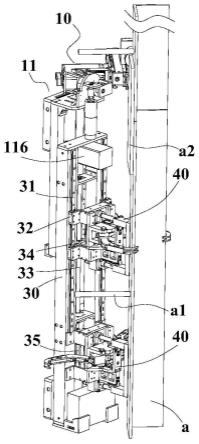
40.图1、2为本发明实施例一中一种具有螺栓复紧功能的攀爬作业平台的立体示意图;
41.图3、4为本发明实施例一中螺栓复紧装置的立体示意图;
42.图5为本发明实施例一中x轴位移机构的立体示意图(隐藏部分部件);
43.图6为本发明实施例一中y轴位移机构的立体示意图(隐藏部分部件);
44.图7为本发明实施例一中旋转组件的立体结构示意图;
45.图8为图7所示结构的装配爆炸图;
46.图9为本发明实施例一中x轴位移组件的立体结构示意图;
47.图10为图9所示结构的装配爆炸图;
48.图11为本发明实施例一中y轴位移组件和工作头的立体装配示意图;
49.图12为图11所示结构的装配爆炸图;
50.图13为本发明实施例一中工作头的装配爆炸图;
51.图14、15为本发明实施例一中夹持装置的立体结构示意图(夹持状态);
52.图16、17为本发明实施例一中夹持装置的爆炸图(张开状态);
53.图18为本发明实施例一中夹持装置的剖视图(张开状态);
54.图19为本发明实施例一中夹持装置处于爪杆张开状态时的结构示意图;
55.图20为图19的剖视图;
56.图21为图19所示状态下限位弹片与前杆体的配合状态图;
57.图22为本发明实施例一中限位弹片的立体结构示意图;
58.图23为本发明实施例一中爪杆处于夹持过程中的结构示意图;
59.图24为本发明实施例一中爪杆处于夹持状态下的结构示意图;
60.图25为本发明实施例一中安装板的立体示意图;
61.图26为本发明实施例二中一种具有螺栓复紧功能的攀爬作业平台的右视图(隐藏螺栓复紧装置);
62.图27为本发明实施例二中夹持装置俯仰角度调节后的示意图(隐藏螺栓复紧装置);
63.图28、29为现有技术中角钢主材的示意图;
64.其中,
65.a-角钢主材;a1-脚钉;a2-连接板;b-套筒;b1-定位凹口;
66.10-螺栓复紧装置;
67.11-延伸臂;111-底部框架;112-旋转组件;112a-旋转座;112b-旋转电机;113-x轴位移机构;113a-x轴机架;113b-x轴动块;113c-x轴丝杆;113d-同步带;
68.114-y轴位移机构;114a-y轴机架;114b-y轴动块;114c-y轴丝杆;115-同步电机;12-工作头;12a-打击座;12b-打击锚杆;12c-弹性销;12d-打击电机;12e-摄像头;12f-旋转轴套;12g-打击凸耳;12h-打击头;12i-打击凸起;
69.30-主机;31-滑移轨道;32-滑移块;33-滑移丝杆;34-滑移套;35-滑移电机;
70.40-夹持装置;
71.41-固定座;411-底板;412-立板;413-安装架;414-前安装座;415-后安装座;416-连接板;417-加强板;
72.42-抵压部;421-v型块;422-螺套;423-螺杆;424-同步带;425-同步电机;43-夹持部;431-爪杆;431a-铅垂推拉轴;431b-后杆体;431c-前杆体;431d-铅垂轴;431e-中间爪;431f-缺口;431g-爪头;431h-夹爪连接块;432-摆动导向套;432a-配合壁;433-铅垂铰接座;434-安装板;434a-定向槽;434b-弯曲段;434c-直线段;434d-倾斜段;435-推拉板;435a-引导槽;436-限位弹片;436a-水平板段;436b-连接耳;436c-弯折端;437a-复位拉簧;437b-径向拉簧;437c-轴向拉簧;438a-推拉丝杆;438b-推拉电机;438c-涡轮;438d-蜗杆;
73.44-俯仰调节板;45-滑板;46-俯仰调节螺母;47-俯仰调节电机;48-俯仰调节丝杆。
具体实施方式
74.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
75.实施例一:
76.如图1、2所示,一种具有螺栓复紧功能的攀爬作业平台,包括主机30、夹持装置40、夹持装置驱动机构、螺栓复紧装置10。
77.如图1所示,本实施例中,所述夹持装置40设置在所述主机30上,为便于理解及描述,以角钢主材a相对于主机30所处的一侧为前侧,即所述夹持装置40设置在所述主机30前侧,其余方位以此为基准类推,应当理解,此方位设定仅是为了方便描述及理解,不能理解为对本发明的限制。
78.如图1、2所示,所述主机30上设置有螺栓复紧装置10,所述主机30、夹持装置40能够沿待攀爬物体进行攀爬,所述螺栓复紧装置10能够对待攀爬物体上的螺栓进行旋拧。
79.具体的,如图1、2所示,所述螺栓复紧装置10包括设置在主机30上的延伸臂11,所
述延伸臂11的端部设置有工作头12,所述工作头12的活动端设置有套筒b。
80.进一步的,如图2、3所示,所述延伸臂11包括设置在主机30上的底部框架111,底部框架111的端部设置有旋转组件112,具体的,所述底部框架111包括两根竖直设置的支撑杆111a,两支撑杆111a的下端之间通过下连接横板111b连接,下连接横板111b的前侧设置有一对通过螺栓连接在一起的夹块111c,夹块111c用于夹持固定同步带。
81.如图3所示,两支撑杆111a的上端之间通过上连接横板111d,上连接横板111d垂直于两支撑杆111a,上连接横板111d与支撑杆111a之间通过直角块111e连接,直角块111e与上连接横板111d的底面以及支撑杆111a的顶端前侧之间通过螺栓连接。
82.如图1、2所示,所述底部框架111滑动安装在主机30上,底部框架111的滑动方向平行于主机30的攀爬方向。具体的,所述主机30后侧设置有一对竖直的导轨,所述底部框架111上设置有滑块,滑块具体设置在所述支撑杆111a的前侧,所述滑块滑动安装在所述导轨上。如图1、2所示,所述主机30上部内侧设置有电机116,电机116的输出轴水平朝向后侧,电机116的输出轴上设置带轮,所述电机116通过带传动机构117驱动底部框架111往复滑动,具体的,所述带传动机构117包括设置在所述主机30下部后侧的带轮117a,带轮117a与电机116的带轮之间绕有同步带117b,同步带117b能够沿竖直方向往复移动,所述夹块111c与同步带117b之间固定连接。
83.结合图1、3,旋转组件112的旋转轴线垂直于所述待攀爬物体,本实施例中,所述旋转组件112的旋转轴线垂直于角钢主材a,且旋转轴线指向角钢主材a的中间棱边,旋转组件112的活动端设置有x轴位移机构113,所述x轴位移机构113活动端设置有y轴位移机构114,y轴位移机构114活动端的往复移动方向垂直于x轴位移机构113活动端的往复移动方向,所述工作头12设置在y轴位移机构114活动端。由于角钢主材a为直角的角钢,所述x轴位移机构113活动端的往复移动方向与旋转组件112旋转轴线之间的夹角为45
°
,以确保工作头12摆动至水平面时其轴线垂直于角钢主材a的侧面。所述旋转组件112的旋转轴线、x轴位移机构113活动端的往复移动轨迹线以及y轴位移机构114活动端的往复移动轨迹线均位于同一平面内。
84.如图3、4所示,所述旋转组件112包括设置在底部框架111端部的旋转座112a,具体的,旋转座112a为竖直设置的板状结构,其垂直于旋转组件112的旋转轴线,所述旋转座112a通过螺栓安装在所述上连接横板111d的前端上方,旋转座112a与上连接横板111d通过螺栓安装有加强板。
85.结合图3、7、8,所述旋转座112a上转动安装有转盘112c,转盘112c位于旋转座112a的后侧,转盘112c前侧设置转轴112d,转轴112d通过轴承转动安装在旋转座112a中,转轴112d前端设置涡轮112e,还包括设置在旋转座112a前侧的旋转电机112b,旋转电机112b的输出轴设置蜗杆112f,蜗杆112f与涡轮112e啮合,即所述旋转电机112b通过涡轮蜗杆机构驱动所述转盘112c转动。所述转盘112c的后侧设置有支架112g,所述x轴位移机构113设置在所述转盘112c的支架112g上。
86.进一步的,所述旋转座112a上设置有三个光电开关,分别位于转轴112d的正上方以及左右两侧,并且均分布在转盘112c的转动轨迹上,所述转盘112c的右侧设置有与所述光电开关配合的挡片。
87.具体的,结合图3、5、9、10,所述x轴位移机构113包括设置在旋转组件112活动端上
的x轴机架113a,具体的,所述x轴机架113a包括对称设置的上下两个l形板,二者固定安装在所述支架112g上,所述x轴机架113a上滑动安装有x轴动块113b、转动安装有x轴丝杆113c,x轴丝杆113c与转轴112d之间的前侧夹角为45
°
,进一步的,两x轴机架113a内侧分别设置一滑块,所述x轴动块113b的两侧设置有与滑块滑动配合安装的滑轨,x轴动块113b为矩形框架结构,其后端设置有与x轴丝杆113c配合的螺母,即x轴动块113b与x轴丝杆113c通过螺母的螺纹连接。所述x轴机架113a上设置有两个光电开关,所述x轴动块113b上设置有与所述光电开关配合的挡片,两光电开关用于限制x轴动块113b行程的极限位置。
88.如图3、5、10所示,所述x轴机架113a还包括设置在两l形板后端的安装板,所述安装板上设置有同步电机115,同步电机115与x轴丝杆113c后端之间通过同步带113d连接,所述同步电机115能够驱动x轴丝杆113c转动,所述y轴位移机构114设置在所述x轴动块113b的前端。
89.结合图3、6、11、12,所述y轴位移机构114包括y轴机架114a,所述y轴机架114a滑动安装在所述x轴位移机构113的活动端,进一步的,所述y轴机架114a包括两块平行的长板,两长板之间通过两个y轴动块114b连接,y轴动块114b也为长板结构。具体的,所述y轴机架114a上设置有垂直于x轴位移机构113移动方向的滑轨,所述x轴动块113b的端部设置有与所述滑轨配合的滑块,y轴机架114a上转动安装有y轴丝杆114c,y轴机架114a后端设置有与y轴丝杆114c连接的同步电机115,所述y轴丝杆114c与所述x轴动块113b上的螺母之间通过螺纹连接。进一步的,所述y轴机架114a上设置两个光电开关,所述x轴动块113b上设置有与之配合的挡片,光电开关与挡片配合用以限定所述y轴机架114a的移动行程极限。
90.如图11-13所示,所述工作头12包括设置在所述延伸臂11端部的打击座12a以及设置在打击座12a上的打击电机12d,具体的,所述打击座12a与x轴动块113b分别位于所述y轴机架114a的两侧,所述打击座12a呈长方体形状的框架结构,其与y轴机架114a固定连接,打击电机12d位于打击座12a的框架内部,打击电机12d轴线平行于y轴位移机构114的移动方向,打击座12a上转动安装有打击锚杆12b,所述打击电机12d能够驱动所述打击锚杆12b转动,所述套筒b安装在所述打击锚杆12b上。
91.进一步的,如图13所示,所述打击锚杆12b通过旋转轴套12f转动安装在所述打击座12a上,所述打击锚杆12b的端部的两侧对称设置有两个打击凸耳12g,所述打击电机12d的输出轴上安装有打击头12h,所述打击电机12d的输出轴上固定安装有键,所述打击头12h的通孔中设置有与键配合的滑槽,以使打击电机12d的输出轴能够驱动打击头12h周向转动,并且打击头12h能够沿轴向往复移动,所述打击电机12d的输出轴上套有弹簧,弹簧位于打击头12h与打击电机12d之间。所述驱动打击头12h的端部对称设置有两个打击凸起12i,分别用于冲击打击凸耳12g,所述打击凸起12i端部的周向宽度小于其根部的周向宽度,以使打击凸起12i冲击打击凸耳12g后,打击电机12d持续施加扭矩时,打击头12h后退并压缩弹簧,打击凸起12i越过打击凸耳12g后,在弹簧的作用下向打击锚杆12b方向弹出,打击凸起12i再次冲击打击凸耳12g,以实现通过套筒b实现螺栓复紧。
92.所述套筒b为现有技术,进一步的,所述打击锚杆12b侧面设置有能够沿垂直于打击锚杆12b方向伸缩的弹性销12c,套筒b上用于与打击锚杆12b配合安装的孔中设置有卡槽,所述套筒b插在打击锚杆12b上时,所述弹性销12c卡在卡槽中实现固定。
93.进一步的,如图3所示,所述打击座12a的上侧设置有摄像头12e,摄像头12e的镜头
朝向套筒b,以便观察套筒b作业情况。
94.进一步的,为实现带动套筒b旋转对螺栓进行旋拧的目的,所述工作头12亦可采用现有技术中的电动冲击扳手。
95.进一步的,所述套筒b的外侧设置有环槽形的定位凹口b1,以便拆下套筒b后通过定位凹口b1对其进行定位防止窜动。
96.如图14所示,所述夹持装置40包括固定座41,所述固定座41上摆动设置一对爪杆431,所述爪杆431包括铰接在一起的后杆体431b、前杆体431c,两爪杆431张开时,后杆体431b与前杆体431c之间的内侧夹角大于180
°
。
97.进一步的,所述夹持装置40至少设置两个,其中至少有一个夹持装置40能够相对于主机30往复滑动。具体的,如图1所示,本实施例中,所述夹持装置40设置两个,其中位于上方的一个夹持装置40能够相对于主机30上下往复滑动,另一个位于下方的夹持装置40固定安装在所述主机30底部前侧。
98.如图1所示,位于上方的能够相对于主机30往复滑动的夹持装置40上设置有滑移块32,所述主机30前侧竖直设置有一对滑移轨道31,所述滑移块32滑动安装在所述滑移轨道31上,所述夹持装置驱动机构设置在所述主机30上,用以驱动上方的夹持装置40上下往复滑动。
99.如图1、2所示,所述主机30为矩形框架结构,所述夹持装置驱动机构位于所述主机30的框架内侧。具体的,所述夹持装置驱动机构包括设置在主机30上的滑移丝杆33、滑移电机35,能够相对于主机30往复滑动的夹持装置40上设置有滑移套34,滑移套34向后伸入所述主机30的框架内侧,滑移套34上设置有轴线沿竖直方向的通孔,所述通孔中安装有螺母,所述滑移丝杆33转动安装在所述主机30框架内侧,滑移丝杆33竖直设置,所述滑移丝杆33与滑移套34中的螺母之间通过螺纹连接,所述滑移电机35位于主机30框架内侧底部,其输出轴竖直朝上,所述滑移丝杆33连接至所述滑移电机35的输出轴。
100.如图14所示,所述夹持装置40包括固定座41、抵压部42、夹持部43。
101.所述夹持部43设置在所述固定座41前侧,本实施例中,所述固定座41用于为其他零部件提供安装位置,其不限于特定形状,能够为其他零部件提供安装位置并使各部件相互配合实现相应功能即可。如图14所示,本实施例中,所述固定座41为竖直设置的板状结构,固定座41底部安装一底板411,底板411前端竖直设置一立板412。
102.如图16所示,所述夹持部43包括摆动设置在所述固定座41上的一对爪杆431,如图20所示,所述爪杆431包括铰接在一起的后杆体431b、前杆体431c,二者之间通过竖直的铅垂轴431d铰接,两爪杆431张开时,后杆体431b与前杆体431c之间的内侧夹角大于180
°
。
103.进一步的,如图19所示,所述固定座41上铰接设置有一对摆动导向套432,具体为,所述固定座41前侧设置左右两个铅垂铰接座433,如图14所示,所述铅垂铰接座433的横置的u形结构,其开口朝前,每个摆动导向套432则通过上下两根同轴的铰接轴铰接在铅垂铰接座433的开口中,铅垂铰接座433上的铰接轴沿竖直方向,进一步的,如图15所示,所述摆动导向套432的铰接位置位于摆动导向套432内端处。
104.如图14所示,所述摆动导向套432为矩形方管状结构,其内部设置有矩形的通孔,所述后杆体431b滑动安装在所述摆动导向套432的矩形通孔中;具体的,所述后杆体431b的截面形状为与摆动导向套432矩形通孔滑动配合的矩形,所述前杆体431c与后杆体431b铰
接的一端的截面外形也是与摆动导向套432矩形通孔滑动配合的矩形。
105.进一步的,如图15所示,所述前杆体431c包括上下两组对称设置的中间爪431e、爪头431g,上下两组间爪431e、爪头431g之间通过夹爪连接块431h连接,具体的,所述中间爪431e为中部向外侧弯曲的片状结构,中间爪431e的两端为直的,所述爪头431g为中部向外侧弯曲的片状结构,中间爪431e、爪头431g的端部均通过螺钉安装在夹爪连接块431h上,所述夹爪连接块431h的截面形状为横置的t形,两组中间爪431e、爪头431g分别安装在夹爪连接块431h的上下两侧,所述中间爪431e、爪头431g的端部外侧面抵在所述夹爪连接块431h的前侧面上,如此结构可实现爪头431g的灵活更换,以满足不同的使用需求。
106.如图16所示,所述固定座41上滑动安装有推拉板435,具体的,所述底板411上设置有一个沿前后方向的导轨,所述推拉板435底部设置一滑块,所述滑块安装在滑动安装在所述导轨上,所述底板411上还设置有前后两个光电开关,二者分别位于推拉板435行程的前后极限位置,推拉板435上设置有与两个光电开关配合的挡片,用以限制推拉板435的前后滑动行程。
107.推拉板435能够拉动后杆体431b将后杆体431b与前杆体431c的铰接位置拉至摆动导向套432中实现两爪杆431夹持,即如图23、24所示的状态。推拉板435能够推动后杆体431b将后杆体431b与前杆体431c的铰接位置推至摆动导向套432外部实现两爪杆431张开。
108.具体的,如图20所示,所述推拉板435顶面设置有一对对称的引导槽435a,引导槽435a呈倾斜的一字型,两引导槽435a之间的间距前小后大,呈向后的敞开形。
109.如图14、16所示,所述固定座41上设置有安装板434,安装板434为水平的板状结构,安装板434的前端与立板412顶端之间通过螺栓连接,安装板434位于推拉板435上方。
110.如图25所示,所述安装板434底面设置有一对对称的定向槽434a,所述定向槽434a自前向后依次包括连通的弯曲段434b、直线段434c、倾斜段434d,三段之间通过圆角过渡,所述弯曲段434b前端向外侧弯曲,所述直线段434c沿前后方向,所述倾斜段434d后端向内侧倾斜,且两定向槽434a的倾斜段434d后端连通。
111.如图14所示,所述后杆体431b的端部设置有沿竖直方向的铅垂推拉轴431a,所述铅垂推拉轴431a的两端分别滑动安装于引导槽435a及定向槽434a中,进一步的,所述铅垂推拉轴431a的两端分别转动安装一滚动件,铅垂推拉轴431a的两端分别通过滚动件滚动安装在引导槽435a及定向槽434a中,所述滚动件可采用滑套、滚动轴承、滚轮等。
112.如图15、16所示,所述固定座41上设置有推拉驱动机构,所述推拉驱动机构能够驱动所述推拉板435往复移动。进一步的,所述推拉驱动机构包括转动安装在固定座41上的推拉丝杆438a,推拉丝杆438a沿前后方向,其前端转动安装在所述立板412上,所述推拉丝杆438a通过螺纹转动安装在推拉板435中,还包括设置在所述固定座41上的推拉电机438b,所述推拉电机438b通过涡轮蜗杆机构与推拉丝杆438a连接。
113.即两爪杆431之间的张开角度可调,具体是,通过推拉电机438b驱动推拉丝杆438a转动,以驱动推拉板435往复移动,推拉板435停留在不同位置时,即可将两爪杆431之间的张开角度调整至所需角度,以满足不同角度夹持或者避让需求。
114.具体的,如图15所示,所述固定座41后侧设置有安装架413,所述推拉丝杆438a后端穿过固定座41转动安装在所述安装架413上,推拉丝杆438a后端设置有涡轮438c,所述推拉电机438b设置在所述固定座41后侧,所述推拉电机438b的输出轴上设置有蜗杆438d,蜗
杆438d水平设置在所述涡轮438c上方并与之配合。
115.如图19、21所示,所述摆动导向套432上设置有限位弹片436,所述前杆体431c上设置有与限位弹片436配合的缺口431f,后杆体431b与前杆体431c的铰接位置被推至摆动导向套432外部时,限位弹片436能够卡至缺口431f中以使后杆体431b与前杆体431c之间的内侧夹角大于180
°
。
116.具体的,如图21、22所示,所述限位弹片436位于所述摆动导向套432外侧的配合壁432a上,所述限位弹片436的主体为贴附在摆动导向套432外侧的片状结构,其包括水平板段436a,所述限位弹片436第一端设置有向内侧弯曲的上下两个弯折端436c,所述弯折端436c压在所述前杆体431c外侧,所述缺口431f位于所述前杆体431c上与后杆体431b铰接的一端的外侧。具体的,所述缺口431f位于每组中间爪431e铰接位置的一端外侧。
117.进一步的,如图21所示,所述摆动导向套432外侧设置有垂直于摆动导向套432的固定柱,所述限位弹片436上设置有长孔,所述长孔的长度方向平行于摆动导向套432的引导方向,所述固定柱位于所述长孔中,所述限位弹片436第二端设置有向外侧弯曲的连接耳436b,所述连接耳436b与固定柱之间连接有轴向拉簧437c。
118.进一步的,如图21所示,所述限位弹片436与摆动导向套432之间设置有径向拉簧437b,具体的,所述摆动导向套432的上下表面各设置一连接柱,所述限位弹片436的上下边对称设置两个连接耳,两连接耳分别与对应的连接柱之间通过径向拉簧437b连接,所述径向拉簧437b能够使限位弹片436压在所述摆动导向套432上。
119.进一步的,如图19、20所示,所述后杆体431b与前杆体431c之间设置有复位拉簧437a,所述复位拉簧437a能够使前杆体431c绕后杆体431b端部向外侧摆动。具体的,所述夹爪连接块431h上靠近后杆体431b的一端向内侧弯曲,且该弯曲端部设置有连接孔,所述后杆体431b上铰接的一端外侧设置有连接孔,所述复位拉簧437a的两端分别连接在两个连接孔上。
120.进一步的,综合参考图14-18,所述抵压部42安装在所述固定座41上,所述抵压部42的活动端位于两爪杆431根部之间,所述抵压部42的活动端能够沿远离或者靠近两爪杆431端部之间夹持区域的方向滑动。
121.具体的,所述抵压部42的活动端包括滑动安装在固定座41上的v型块421,v型块421能够前后滑动,v型块421为竖直的长条形结构,其前侧设置v型槽,v型槽为竖直的,其开口朝前。进一步的,所述v型槽内壁上设置有橡胶垫。
122.所述抵压部42包括设置在固定座41上的v型块驱动机构。所述v型块驱动机构包括螺套422、螺杆423、同步带424、同步电机425,v型块421上下两端的后侧分别设置一螺套422,螺套422的轴线沿前后方向。
123.其中,上方的螺套422后端下方设置一滑块,所述安装板434顶部设置有沿前后方向的导轨,所述滑块滑动安装在所述导轨上。进一步的,所述安装板434顶部设置有前后两个光电开关,两个光电开关分别位于上方的螺套422前后行程的极限位置,上方的螺套422的后端设置有与该光电开关配合的挡片,挡片与光电开关配合以限制螺套422的前后行程。
124.下方的螺套422后端上方设置有滑块,如图14所示,所述底板411底部依次设置有前安装座414、后安装座415,所述前安装座414为沿前后方向竖直的板状结构,其上设置镂空,呈横置的日字形,前安装座414垂直于后安装座415,所述后安装座415为t形竖直板状结
构,所述前安装座414底部设置有沿前后方向的导轨,下方的螺套422后端上方的滑块滑动安装在该导轨上。
125.如图16-18所示,所述固定座41顶部以及后安装座415下部分别转动安装一螺杆423,螺杆423分别与两个螺套422螺纹连接,螺杆423后端设置有同步带轮,两同步带轮上绕有同步带424,所述后安装座415下部后侧设置有同步电机425,同步电机425驱动底部的螺杆423及同步带轮转动。
126.进一步的,可在所述螺杆423后端设置涡轮,所述同步电机425输出轴上设置蜗杆,蜗杆与涡轮配合,以实现通过同步电机425驱动底部的螺杆423及同步带轮转动。
127.进一步的,如图14、15所示,所述固定座41顶部后方两侧各设置一连接板416,两连接板416之间设置有水平的加强板417。
128.如图14、15所示,所述后安装座415上部后方两侧各设置一连接板416,两连接板416之间设置有水平的加强板417。
129.如图1所示,实际应用中,位于下方的夹持装置40的四个连接板416通过螺栓固定安装在所述主机30底部前侧。
130.进一步的,如图14、15所示,位于上方的能够滑动的夹持装置40的固定座41的后侧设置有滑移块32,具体的,如图14、15所示,所述滑移块32设置四个,分别安装在四个连接板416后部,其中上方的两个滑移块32位于下方两个滑移块32的正上方,滑移块32的滑槽沿竖直方向。
131.进一步的,如图15所示,所述后安装座415后侧上部设置有u形的滑移套34,滑移套34位于下部两个连接板416之间,滑移套34开口朝前,所述同步带424竖直穿过所述滑移套34的开口,滑移套34后端安装有轴线沿竖直方向的螺母,用以与滑移丝杆33配合,以根据实际需求通过滑移丝杆33驱动滑移套34带动位于上方的夹持装置40移动。
132.进一步的,所述具有螺栓复紧功能的攀爬作业平台还包括控制单元,控制单元为现有技术,如可采用plc等,所述光电开关、摄像头12e连接至控制单元,所述滑移电机35、同步电机425、推拉电机438b、俯仰调节电机47、旋转电机112b、同步电机115、打击电机12d均由控制单元控制。
133.工作原理:
134.本发明中的一种具有螺栓复紧功能的攀爬作业平台在实际应用时,主要用于角钢主材等物体的攀爬作业,其通过夹持装置40夹持在角钢主材上沿角钢主材向上攀爬。
135.避让脚钉a1:
136.结合图1、2、20,夹持装置40的两爪杆431靠近或者远离时能够实现夹持或者张开,爪杆431均为两段式,即两爪杆431张开时,由于后杆体431b与前杆体431c之间的内侧夹角能够张开至大于180
°
,该夹持装置40的张开角度大于现有技术中常见的夹爪张开角度,张开后的夹持装置40沿角钢主材移动时,由于其张开角度较大,能够避让较长的脚钉等障碍物,相对于现有技术,其避让范围更广。
137.攀爬至需进行螺栓复紧位置时停止,螺栓复紧装置10则对待攀爬物体上的螺栓进行旋拧,以实现复紧操作,相对于现有技术,该攀爬作业平台具有螺栓复紧功能,无需人力操作,安全性较好,劳动强度低,并且复紧效率较高。
138.实际应用中,旋转组件112能够带动x轴位移机构113、y轴位移机构114、工作头12
整体沿垂直于所述待攀爬物体的旋转轴线旋转,以调节工作头12在待攀爬物体上的作业位置,x轴位移机构113能够带动y轴位移机构114、工作头12整体往复运动,以调节工作头12在待攀爬物体上的作业位置,y轴位移机构114则能够带动工作头12沿垂直于x轴位移机构113方向往复移动,以控制工作头12靠近或者远离待攀爬物体,满足复紧需求,该结构整体原理简单、动作灵活,能够满足将工作头12调节至不同作业位置的需求。将x轴位移机构113活动端的往复移动方向与旋转组件112旋转轴线之间的夹角设置为45
°
,能够确保在攀爬角钢主材等物体时,工作头12垂直于角钢主材的侧面,以便对其表面的螺栓进行复紧,旋转组件112转动时,则可将工作头12调解至指向不同的侧面,满足对角钢主材不同侧面上螺栓的复紧需求。
139.底部框架111相对于主机30滑动时,能够将工作头12伸缩至不同高度,以实现对不同位置螺栓的复紧操作,作业范围更广。实际应用中,旋转电机112b转动可通过涡轮蜗杆机构驱动所述转盘112c转动,以带动x轴位移机构113等部件转动,并且由于涡轮蜗杆机构的自锁作用,即动力仅能够从旋转电机112b传输至转盘112c,因而x轴位移机构113等部件转动之后能够稳定停留在预定位置,以确保作业位置固定不动,稳定性较好。实际应用中,同步电机115驱动x轴丝杆113c转动时,x轴动块113b随之移动,进而实现y轴位移机构114的位置调整,结构简单、动作可靠。同步电机115转动,驱动y轴丝杆114c转动,以带动整体y轴机架114a移动,实现位置调整,结构简单、动作可靠。实际应用中,打击电机12d工作时,能够带动打击锚杆12b转动,进而带动套筒b转动,以对螺栓旋拧进行复紧,确保复紧效果。
140.设置两个夹持装置40,可交替夹持、张开,实现沿角钢主材攀爬,其结构、原理较为简单,动作可靠。实际应用中,可通过夹持装置驱动机构驱动夹持装置40沿滑移轨道31滑动,以实现攀爬动作,移动较为顺畅。将夹持装置驱动机构设置于所述主机30的框架内侧,整体结构较为规整,同时可通过主机30保护内侧的夹持装置驱动机构不受外侧物体影响。夹持时,抵压部42的活动端能够向靠近两爪杆431端部之间夹持区域的方向滑动,抵压部42的活动端抵在角钢的棱边处,以与两爪杆431配合实现夹持;两爪杆431张开时,抵压部42的活动端能够向远离两爪杆431端部之间夹持区域的方向滑动,抵压部42的活动端远离角钢的棱边处,因而抵压部42的活动端可与角钢棱边之间保持一定安全距离,当夹持装置沿角钢长度方向移动时,抵压部42的活动端可避开从角钢棱边处凸起的连接板,实现避让角钢连接板。
141.避让连接板a2:
142.结合图1、2、20,实际应用中,v型块驱动机构可驱动v型块421压在角钢主材a棱边处,v型块421与角钢主材a棱边处紧密贴合,可与两爪杆431配合实现牢固夹持,另外还可驱动v型块421远离角钢主材a棱边处,实现避让角钢主材a的连接板a2,其结构简单、动作可靠。
143.实际应用中,推拉板435用以提供夹持、张开的动力源,夹持时,推拉板435移动,拉动后杆体431b,进而能够将后杆体431b与前杆体431c的铰接位置拉至摆动导向套432中,同时两摆动导向套432会摆动,以使两爪杆431靠拢夹持,后杆体431b与前杆体431c的铰接位置被拉至摆动导向套432中时,后杆体431b、前杆体431c被摆动导向套432内部限制,二者之间的内部夹角变小,如可变成180
°
,被限制的后杆体431b、前杆体431c之间不发生摆动,进而能够实现稳固的夹持,推拉板435移动停留在不同位置时,两爪杆431在摆动导向套432中
的位置,以及两摆动导向套432之间的夹角均是不同的,即可通过推拉板435的移动停留位置,调节两爪杆431的夹持角度,调节较为灵活;张开时,推拉板435推动后杆体431b将后杆体431b与前杆体431c的铰接位置推至摆动导向套432外部,实现两爪杆431张开,后杆体431b与前杆体431c的铰接位置推至摆动导向套432外部时,二者之间则可发生摆动,此时,后杆体431b与前杆体431c之间的内侧夹角大于180
°
,进而实现张开较大的角度,能够避让较长的脚钉等障碍物,相对于现有技术,其避让范围更广。
144.引导槽435a、定向槽434a的设置,能够在推拉板435移动时,分别引导铅垂推拉轴431a按照预设轨迹移动,进而实现在推拉板435的往复移动过程中,两后杆体431b能够同时被拉动,并随摆动导向套432摆动,后杆体431b与前杆体431c的铰接位置被拉至摆动导向套432中,两爪杆431实现夹持;还能够实现:两后杆体431b能够同时被推动,并随摆动导向套432反向摆动,后杆体431b与前杆体431c的铰接位置被推至摆动导向套432外部,后杆体431b与前杆体431c之间的内侧夹角大于180
°
,两爪杆431实现张开;引导槽435a、定向槽434a的设置,能够确保夹持及张开动作的可靠性。实际应用中,推拉电机438b转动时,能够带动涡轮蜗杆机构中的蜗杆转动,进而驱动涡轮转动,涡轮则带动推拉丝杆438a转动,进而通过推拉丝杆438a驱动推拉板435往复移动,涡轮蜗杆机构及丝杆螺母机构能够实现较大的传动比,进而能够为推拉板435提供较大的推拉驱动力,以实现稳固的夹持及张开动作,并且涡轮蜗杆机构及丝杆螺母机构具有反向锁紧特性,即动力仅能够由推拉电机438b向推拉板435方向传递,而不能反向传递,进而能够有效确保夹持及张开的稳定性,避免夹持不紧或者张开不顺畅等缺陷。
145.实际应用中,当后杆体431b与前杆体431c的铰接位置被推至摆动导向套432外部时,前杆体431c上的缺口431f从摆动导向套432端部露出,当缺口431f移动至限位弹片436处时,限位弹片436卡至缺口431f中,在限位弹片436卡在缺口431f中对前杆体431c施加拨动力作用下,前杆体431c绕其铰接位置相对于后杆体431b向外侧摆动,并能够摆动至后杆体431b与前杆体431c之间的内侧夹角大于180
°
的状态,进而实现避让范围的扩大,其结构、原理较为简单,动作灵敏可靠。当后杆体431b与前杆体431c的铰接位置缩回摆动导向套432中时,限位弹片436则滑出缺口431f,以实现夹持。
146.实际应用中,弯折端436c用以卡在缺口431f中实现后杆体431b与前杆体431c之间张开角度的调节,其结构简单、动作可靠。轴向拉簧437c能够对连接耳436b所在的一端施加拉力,进而使弯折端436c具有压紧前杆体431c外侧的趋势,以确保缺口431f滑出时能够准确滑入位,并且在缺口431f滑入摆动导向套432中时,弯折端436c则能够灵活从缺口431f中滑出,整体结构、原理简单,动作可靠。径向拉簧437b能够使限位弹片436紧贴在摆动导向套432上,以确保缺口431f滑出时限位弹片436能够准确滑入位,并且在缺口431f滑入摆动导向套432中时,限位弹片436则能够灵活从缺口431f中滑出,整体结构、原理简单,动作可靠。实际应用中,当后杆体431b与前杆体431c的铰接位置被推至摆动导向套432外部时,在复位拉簧437a对前杆体431c施加的拉力作用下,前杆体431c绕其铰接位置相对于后杆体431b向外侧摆动,并能够摆动至后杆体431b与前杆体431c之间的内侧夹角大于180
°
的状态,进而实现避让范围的扩大,其结构、原理较为简单,动作灵敏可靠。当后杆体431b与前杆体431c的铰接位置缩回摆动导向套432中时,复位拉簧437a则拉伸,以实现夹持。实际应用中,通过调节两爪杆431之间的张开角度,可实现对不同规格的待攀爬物体的夹持攀爬,适用范围更
广。
147.实施例二:
148.本实施例与实施例一的区别在于:
149.所述夹持装置40相对于所述主机30的俯仰角度可调。具体的,如图26所示,对于位于上方的夹持装置40,其通过四个连接板416安装在一竖直的俯仰调节板44前侧,所述四个滑移块32安装在一竖直设置的滑板45后侧,所述滑移套34安装在所述滑板45后侧,用以驱动滑板45上下往复滑动,所述俯仰调节板44的上端或者下端铰接在滑板45上,铰接轴沿左右方向,俯仰调节板44的另一端铰接设置有俯仰调节螺母46,俯仰调节螺母46的铰接轴沿左右方向,俯仰调节螺母46的轴线垂直于其铰接轴,所述滑板45上铰接设置有俯仰调节电机47,俯仰调节电机47的铰接轴沿左右方向,其输出轴设置有俯仰调节丝杆48,俯仰调节丝杆48与俯仰调节螺母46通过螺纹配合安装,俯仰调节电机47驱动俯仰调节丝杆48正反转,以通过俯仰调节螺母46驱动俯仰调节板44俯仰角度变化,进而带动上方的夹持装置40进行俯仰角度的调节。
150.如图26所示,对于位于下方的夹持装置40,其通过四个连接板416安装在一竖直的俯仰调节板44前侧,所述俯仰调节板44的上端或者下端铰接在主机30上,铰接轴沿左右方向,俯仰调节板44的另一端铰接设置有俯仰调节螺母46,俯仰调节螺母46的铰接轴沿左右方向,俯仰调节螺母46的轴线垂直于其铰接轴,所述主机30底部铰接设置有俯仰调节电机47,俯仰调节电机47的铰接轴沿左右方向,其输出轴设置有俯仰调节丝杆48,俯仰调节丝杆48与俯仰调节螺母46通过螺纹配合安装,俯仰调节电机47驱动俯仰调节丝杆48正反转,以通过俯仰调节螺母46驱动俯仰调节板44俯仰角度变化,进而带动下方的夹持装置40进行俯仰角度的调节。
151.实际攀爬过程中,通过调节夹持装置40相对于主机30的俯仰角度,可实现主机30姿态的调节,如可将主机30调节成平行于待攀爬物体的姿态等,进而满足实际攀爬需求。如图27所示的状态为,上方的夹持装置40为上仰姿态,下方的夹持装置40为下俯姿态。
152.实施例三:
153.本发明还公开一种采用上述的一种具有螺栓复紧功能的攀爬作业平台的作业方法,包括如下步骤:
154.s1、上方能够滑动的夹持装置40夹持在待攀爬的物体上,如夹持在角钢塔的角钢主材a上,所述夹持装置40夹持待攀爬的物体时,夹持装置40上的抵压部42的活动端向待攀爬的物体移动并压在该物体上,即v型块421抵在角钢主材a的棱边处,以与夹持装置40的两爪杆431配合实现牢固夹持,即如图1、2所示的状态。
155.如图1所示,固定的夹持装置40的两爪杆431张开,张开时,推拉板435推动后杆体431b将后杆体431b与前杆体431c的铰接位置推至摆动导向套432外部,实现两爪杆431张开,后杆体431b与前杆体431c的铰接位置推至摆动导向套432外部时,二者之间则可发生摆动,此时,前杆体431c上的缺口431f从摆动导向套432端部露出,当缺口431f移动至限位弹片436处时,限位弹片436卡至缺口431f中,在限位弹片436卡在缺口431f中对前杆体431c施加拨动力作用下,前杆体431c绕其铰接位置相对于后杆体431b向外侧摆动,与此同时,在复位拉簧437a对前杆体431c施加的拉力作用下,前杆体431c绕其铰接位置相对于后杆体431b向外侧摆动,二者共同作用均可使后杆体431b与前杆体431c之间的内侧夹角调整至大于
180
°
的状态。
156.所述夹持装置40的两爪杆431张开时,夹持装置40上的抵压部42的活动端向远离待攀爬的物体的方向移动,即v型块421后退离开角钢主材a的棱边处。
157.s2、主机30相对于能够滑动的夹持装置40向上沿待攀爬的物体向上移动;具体的,滑移电机35带动滑移丝杆33转动,在滑移丝杆33与滑移套34中的螺母配合,驱动主机30相对于上方的夹持装置40上移,与此同时,固定安装在主机30下端的夹持装置40随之上移,由于固定的夹持装置40的两爪杆431是张开的,并且后杆体431b与前杆体431c之间的内侧夹角大于180
°
,因而在上升时,能够避开角钢主材a棱边两侧的脚钉,另外由于固定的夹持装置40上的v型块421是后退离开角钢主材a的棱边处的,因而在上升过程中能够避开两段角钢主材a连接处的连接板。
158.其中一个夹持装置40在夹持待攀爬的物体之前,通过另一个夹持装置40调节其相对于主机30的俯仰角度,使主机30平行于所述待攀爬的物体。
159.s3、主机30向上移动停止后,通过上方的夹持装置40上的俯仰调节板44、俯仰调节螺母46、俯仰调节电机47、俯仰调节丝杆48等部件调节主机30的俯仰角度,使主机30平行于所述待攀爬的物体,固定的夹持装置40夹持在待攀爬的物体上,上方能够滑动的夹持装置40的两爪杆431张开,张开的爪杆431的后杆体431b与前杆体431c之间的内侧夹角大于180
°
;所述夹持装置40的两爪杆431张开时,夹持装置40上的抵压部42的活动端向远离待攀爬的物体的方向移动,即v型块421后退离开角钢主材a的棱边处。
160.s4、上方能够滑动的夹持装置40沿主机30向上移动;具体的,滑移电机35带动滑移丝杆33转动,在滑移丝杆33与滑移套34中的螺母配合,驱动上方的夹持装置40相对于主机30上移,由于上方的夹持装置40的两爪杆431是张开的,并且后杆体431b与前杆体431c之间的内侧夹角大于180
°
,因而在上升时,能够避开角钢主材a棱边两侧的脚钉,另外由于上方的夹持装置40上的v型块421是后退离开角钢主材a的棱边处的,因而在上升过程中能够避开两段角钢主材a连接处的连接板。
161.其中一个夹持装置40在夹持待攀爬的物体之前,通过另一个夹持装置40调节其相对于主机30的俯仰角度,使主机30平行于所述待攀爬的物体。
162.s5、能够滑动的夹持装置40向上移动停止后,重复步骤s1-s5。
163.此过程中,当主机30带动螺栓复紧装置10攀爬至需进行螺栓复紧的位置时,两个夹持装置40均夹持在待攀爬的物体上,所述螺栓复紧装置10对待攀爬物体上的螺栓进行旋拧。具体的,电机116驱动调节螺栓复紧装置10的高度,使工作头12处于作业高度,旋转电机112b驱动调节x轴位移机构113、y轴位移机构114及工作头12调节至角钢主材a的左侧面或者右侧面,以对不同侧面上的螺栓进行复紧,所述x轴位移机构113动作,带动工作头12移动至正对螺栓的位置,y轴位移机构114动作,驱动工作头12的套筒b套在待复紧的螺栓上,然后打击电机12d转动,通过打击头12h不断冲击打击凸耳12g,进而冲击套筒b紧固螺栓,实现螺栓复紧作业,复紧完成后,y轴位移机构114动作,驱动工作头12的套筒b脱离螺栓,随后对其他螺栓进行复紧作业。
164.本发明中的作业方法在实际应用时,通过两个夹持装置40交替夹持、张开,能够顺利实现攀爬至需进行螺栓复紧的位置时,两个夹持装置40均夹持在待攀爬的物体上,为复紧作业提供稳定支撑,所述螺栓复紧装置10对待攀爬物体上的螺栓进行旋拧以实现复紧,
攀爬方式简单、可靠,能够为复紧作业提供稳定支撑,复紧效果较好,作业效率高。并且在攀爬过程中,由于后杆体431b与前杆体431c之间的内侧夹角能够张开至大于180
°
,该夹持装置40的张开角度大于现有技术中常见的夹爪张开角度,张开后的夹持装置40沿角钢主材移动时,由于其张开角度较大,能够避让较长的脚钉等障碍物,相对于现有技术,其避让范围更广。
165.以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1