小直径钢管对接焊缝全位置自动焊接装置
1.本发明涉及材料成型及控制技术领域,特别涉及一种小直径钢管对接焊缝全位置自动焊接装置。
背景技术:
2.油田注水管道、输油管道在维修或者铺设时由于钢管不能自由旋转,因此针对对接焊缝需要采用全位置焊接。目前,绝大多数施工现场的全位置焊接依赖人工的手工焊接。全位置焊接需要施焊人员具备较高的焊接水平,厚壁的钢管则需要多层及多道焊接,劳动强度大,有些施工环境条件较差,依靠人工焊接其焊接质量一致性难以保证,焊接效率低,人工成本高,且高级焊接人员短缺。因此,迫切需要一种自动的全位置焊接装置取代人工的手工焊接,以提高焊接质量、提高焊接效率、增产增效。
技术实现要素:
3.本发明的目的在于提供一种小直径钢管对接焊缝全位置自动焊接装置,解决了目前小直径钢管对接焊缝全位置焊接依赖于人工焊接存在的焊接质量差、焊接效率低、成本高等问题。本发明提高了焊接质量及焊接生产效率,实现了小直径钢管对接焊缝全位置自动焊接。
4.本发明的上述目的通过以下技术方案实现:小直径钢管对接焊缝全位置自动焊接装置,包括两套构造相同、对称布置的滚轮支架,其中,第一套滚轮支架包括钢板a1、钢板b2、钢板c3,法兰直线轴承a~ f7~12及法兰螺母a13固定在所述钢板a1上,法兰直线轴承g14、法兰直线轴承h15固定在钢板c3上,法兰直线轴承i~l16~19固定在钢板b2上;钢套a20一端套装法兰直线轴承a7,另一端套装法兰直线轴承g14;钢套b21一端套装法兰直线轴承b8,另一端套装法兰直线轴承h15;钢套c22一端套装法兰直线轴承c9,另一端套装法兰直线轴承i16;钢套d23一端套装法兰直线轴承d10,另一端套装法兰直线轴承g14;钢套e24一端套装法兰直线轴承e11,另一端套装法兰直线轴承j17;钢套f25一端套装法兰直线轴承f12,另一端套装法兰直线轴承k18;钢套a~f确保各法兰直线轴承同轴定位及钢板a1与钢板b2、钢板c3之间平行且等间距;通过螺栓使钢板a1、钢板b2、钢板c3之间夹持且固定各钢套,组成第一套滚轮支架。
5.所述的两套滚轮支架之间通过光轴a45、光轴b46、光轴c47、光轴d48、光轴e49、光轴f50穿入各法兰直线轴承中进行定位及移动,两套滚轮支架之间的距离通过正反牙丝杠51与法兰螺母a13、法兰螺母b44进行调节,进而调节钢管a119与钢管b120形成的对接焊缝的间隙调节;正反牙丝杠51通过手轮a52进行旋转。
6.所述的第一套滚轮支架上置三个夹持钢管的滚轮,滚轮a61的中心穿过轴a65且同步运转,轴a65两端分别通过轴承座a53、轴承座b54安装在第一套滚轮支架的钢板a1、钢板b2上;滚轮b62的中心穿过轴b66且同步运转,轴b66两端分别通过轴承座c55、轴承座d56安装在第一套滚轮支架的钢板a1、钢板c3上;滚轮e69通过轴e70固定于滚轮座a71,光轴g72、
光轴h73、光轴i74、光轴j75分别穿过固定在螺母a80上的直线轴承a76、直线轴承b77、直线轴承c78、直线轴承d79,所述光轴g72、光轴h73、光轴i74、光轴j75一端固定于滚轮座a71;丝杠a81一端固定手轮b85,另一端穿过螺母a80、弹簧a82、压力轴承a83、滚轮座a71并通过锁紧螺母a84固定端部;通过丝杠a81调节滚轮e69与螺母a80之间的距离,螺母a80固定在第一套滚轮支架的钢板a1、钢板b2上。
7.步进电动机a103固定于钢板a1,输出轴安装同步带轮a104,同步带轮b105安装于轴a65,同步带a106安装于同步带轮a104和同步带轮b105之间,实现步进电动机a103对滚轮a61的驱动;步进电动机b107固定于钢板a1,输出轴安装同步带轮c108,同步带轮d109安装于轴b66,同步带b110安装于同步带轮c108和同步带轮d109之间,实现步进电动机b107对滚轮b62的驱动。
8.钢管a119装夹于滚轮a61、滚轮b62和滚轮e69之间,通过手轮b85旋转丝杠a81、弹簧a82、压力轴承a83、滚轮座a71、轴e70实现对钢管a119的夹紧;钢管b120与钢管a119的装夹方式相同。
9.弧形滑轨121、弧形齿条123固定于钢板a1上,调整焊枪145的倾角;弧形滑轨的滑块122安装在弧形滑轨121上,齿轮124安装于涡轮蜗杆减速箱126且输出轴与弧形齿条123啮合,行星减速步进电机125安装于涡轮蜗杆减速箱126输入端并拖动齿轮124;纵向滑移台固定板127固定于弧形滑轨的滑块122及涡轮蜗杆减速箱126上。
10.纵向滑移台128安装于纵向滑移台固定板127上,步进电动机e132通过电机固定板134固定于纵向滑移台128,同步带轮i129安装在纵向滑移台128上,同步带轮j130安装在步进电动机e132上,步进电动机e132通过同步带e131实现对纵向滑移台滑块133的移动控制。
11.横向滑移台连接板135安装在纵向滑移台滑块133上,横向滑移台136固定于滑移台连接板135,同步带轮k140安装于步进电动机f137输出轴上,同步带轮l141安装于横向滑移台136轴上,步进电动机f137通过同步带f142实现对横向滑移台滑块138的移动控制,t型铝材139固定于横向滑移台滑块138上,焊枪固定板143一端安装于t型铝材139,另一端安装焊枪固定夹具144,焊枪145夹持于焊枪固定夹具144中。
12.本发明的有益效果在于:构思新颖,结构简单,使用方便。解决了小直径钢管对接焊缝全位置焊接对高级手工焊接人员的依赖、焊接质量低、焊接效率低的技术问题。提高了焊接质量及焊接生产效率,实现了小直径钢管对接焊缝全位置自动焊接。实用性强。
附图说明
13.此处所说明的附图用来提供对本发明的进一步理解,构成本技术的一部分,本发明的示意性实例及其说明用于解释本发明,并不构成对本发明的不当限定。
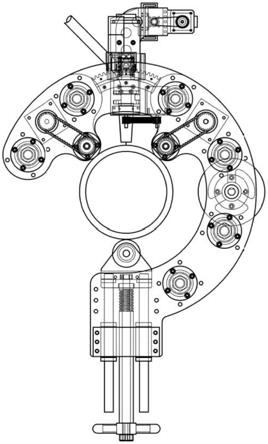
14.图1、图2为本发明的整体结构示意图(主视及侧视);图3为本发明的滚轮支架六块钢板形状示意图;图4至图6为本发明的左侧滚轮支架钢板与直线轴承及钢套组合体结构示意图;图7至图9为本发明的右侧滚轮支架钢板与直线轴承及钢套组合体结构示意图;图10、图11为本发明的两套滚轮支架与光轴、正反牙丝杆组合体结构示意图;图12为本发明的四套主动滚轮及轴承座组合示意图;图13至图15为本发明的左侧顶紧滚轮组合体结构示意图;
图16至图18为本发明的右侧顶紧滚轮组合体结构示意图;图19至图21为本发明的四套主动滚轮及驱动电机、两套顶紧滚轮主体安装于两套滚轮支架与光轴组成的组合体、钢管结构示意图;图22为本发明的弧形滑轨、弧形齿条、行星减速步进电动机、蜗轮蜗杆减速机组合体示意图;图23为本发明的弧形滑轨、弧形齿条、行星减速步进电动机、蜗轮蜗杆减速机、纵向滑移台支撑板组合体结构示意图;图24、图25为本发明的弧形滑轨、弧形齿条、行星减速步进电动机、蜗轮蜗杆减速机、纵向滑移台支撑板、纵向滑移台、纵向滑移台步进电动机组合体结构示意图;图26、图27为本发明的弧形滑轨、弧形齿条、行星减速步进电动机、蜗轮蜗杆减速机、纵向滑移台支撑板、纵向滑移台、纵向滑移台步进电动机、横向滑移台连接板组合体结构示意图;图28、图29为本发明的弧形滑轨、弧形齿条、行星减速步进电动机、蜗轮蜗杆减速机、纵向滑移台支撑板、纵向滑移台、纵向滑移台步进电动机、横向滑移台连接板、横向滑移台、横向滑移台步进电动机、横向滑移台滑块、t型铝材组合体结构示意图;图30、图31为本发明的弧形滑轨、弧形齿条、行星减速步进电动机、蜗轮蜗杆减速机、纵向滑移台支撑板、纵向滑移台、纵向滑移台步进电动机、横向滑移台连接板、横向滑移台、横向滑移台步进电动机、横向滑移台滑块、t型铝材、焊枪固定板、焊枪夹具、焊枪组合体结构示意图。
15.图中:1、钢板a;2、钢板b;3、钢板c;4、钢板d;5、钢板e;6、钢板f;7、法兰直线轴承a;8、法兰直线轴承b;9、法兰直线轴承c;10、法兰直线轴承d;11、法兰直线轴承e;12、法兰直线轴承f;13、法兰螺母a;14、法兰直线轴承g;15、法兰直线轴承h;16、法兰直线轴承i;17、法兰直线轴承j;18、法兰直线轴承k;19、法兰直线轴承l;20、钢套a;21、钢套b;22、钢套c;23、钢套d;24、钢套e;25、钢套f;26、法兰直线轴承m;27、法兰直线轴承n;28、法兰直线轴承o;29、法兰直线轴承p;30、法兰直线轴承q;31、法兰直线轴承r;32、法兰直线轴承s;33、法兰直线轴承t;34、法兰直线轴承u;35、法兰直线轴承v;36、法兰直线轴承w;37、法兰直线轴承x;38、钢套g;39、钢套h;40、钢套i;41、钢套j;42、钢套k;43、钢套l;44、法兰螺母b;45、光轴a;46、光轴b;47、光轴c;48、光轴d;49、光轴e;50、光轴f;51、正反牙丝杠;52、手轮a;53、轴承座a;54、轴承座b;55、轴承座c;56、轴承座d;57、轴承座e;58、轴承座f;59、轴承座g;60、轴承座h;61、滚轮a;62、滚轮b;63、滚轮c;64、滚轮d;65、轴a;66、轴b;67、轴c;68、轴d;69、滚轮e;70、轴e;71、滚轮座a;72、光轴g;73、光轴h;74、光轴i;75、光轴j;76、直线轴承a;77、直线轴承b;78、直线轴承c;79、直线轴承d;80、螺母a;81、丝杠a;82、弹簧a;83、压力轴承a;84、锁紧螺母a;85、手轮b;86、滚轮f;87、轴f;88、滚轮座b;89、光轴k;90、光轴l;91、光轴m;92、光轴n;93、直线轴承e;94、直线轴承f;95、直线轴承g;96、直线轴承h;97、螺母b;98、丝杠b;99、弹簧b;100、压力轴承b;101、锁紧螺母b;102、手轮c;103、步进电动机a;104、同步带轮a;105、同步带轮b;106、同步带a;107、步进电动机b;108、同步带轮c;109、同步带轮d;110、同步带b;111、步进电动机c;112、同步带轮e;113、同步带轮f;114、同步带c;115、步进电动机d;116、同步带轮g;117、同步带轮h;118、同步带d;119、钢管a;120、钢管b;121、弧形滑轨;122、弧形滑轨的滑块;123、弧形齿条;124、齿轮;125、行星减速步进电机;126、涡轮蜗杆减速箱;127、
纵向滑移台固定板;128、纵向滑移台;129、同步带轮i;130、同步带轮j;131、同步带e;132、步进电动机e;133、纵向滑移台滑块;134、电机固定板;135、横向滑移台连接板;136、横向滑移台;137、步进电动机f;138、横向滑移台滑块;139、t型铝材;140、同步带轮k;141、同步带轮l;142、同步带f;143、焊枪固定板;144、焊枪固定夹具;145、焊枪。
具体实施方式
16.下面将结合附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
17.参见图1至图31所示,本发明的小直径钢管对接焊缝全位置自动焊接装置,安装法兰直线轴承的钢板之间夹持钢套组成两套滚轮支架,通过光轴穿入法兰直线轴承中进行定位及移动,正反牙丝杠与法兰螺母用于调整对接焊缝间隙。每套滚轮支架上的三只滚轮用于夹持钢管,根据钢管直径调整顶紧滚轮位置。步进电动机通过同步带拖动滚轮旋转,实现焊接装置绕钢管旋转,实现全位置焊接。焊枪及横、纵向滑移台通过连接部件固定于弧形滑轨和弧形齿条上,弧形滑轨和弧形齿条固定于钢板上,实现焊枪的倾角调整及横、纵向移动以及横向摆动焊接,解决了小直径钢管对接焊缝全位置焊接对高级手工焊接人员的依赖、焊接质量低、焊接效率低的技术问题。具体结构包括两套结构相同、对称布置的滚轮支架,其中,第一套滚轮支架包括钢板a1、钢板b2、钢板c3,法兰直线轴承a7、法兰直线轴承b8、法兰直线轴承c9、法兰直线轴承d10、法兰直线轴承e11、法兰直线轴承f12、法兰螺母a13分别通过螺栓固定在钢板a1上,法兰直线轴承g14、法兰直线轴承h15固定在钢板c3上,法兰直线轴承i16、法兰直线轴承j17、法兰直线轴承k18、法兰直线轴承l19分别通过螺栓固定在钢板b2上。
18.钢套a20一端套装法兰直线轴承a7,另一端套装法兰直线轴承g14;钢套b21一端套装法兰直线轴承b8,另一端套装法兰直线轴承h15;钢套c22一端套装法兰直线轴承c9,另一端套装法兰直线轴承i16;钢套d23一端套装法兰直线轴承d10,另一端套装法兰直线轴承g14;钢套e24一端套装法兰直线轴承e11,另一端套装法兰直线轴承j17;钢套f25一端套装法兰直线轴承f12,另一端套装法兰直线轴承k18;钢套a~f的作用是确保法兰直线轴承同轴定位及钢板a1与钢板b2、钢板c3之间平行且等间距。通过螺栓将钢板a1与钢板b2、钢板c3之间夹持钢套a~f固定,组成第一套滚轮支架。
19.第二套滚轮支架包括钢板d4、钢板e5、钢板f6,法兰直线轴承m26、法兰直线轴承n27分别安装在钢板e5上,法兰直线轴承o28、法兰直线轴承p29、法兰直线轴承q30、法兰直线轴承r31分别通过螺栓安装在钢板d4上;法兰直线轴承s32、法兰直线轴承t33、法兰直线轴承u34、法兰直线轴承v35、法兰直线轴承w36、法兰直线轴承x37、法兰螺母b44分别通过螺栓固定在钢板f6上。
20.钢套g38一端套装法兰直线轴承m26,另一端套装法兰直线轴承s32;钢套h39一端套装法兰直线轴承n27,另一端套装法兰直线轴承t33;钢套i40一端套装法兰直线轴承o28,另一端套装法兰直线轴承u34;钢套j41一端套装法兰直线轴承p29,另一端套装法兰直线轴
承v35;钢套k42一端套装法兰直线轴承q30,另一端套装法兰直线轴承w36;钢套l43一端套装法兰直线轴承r31,另一端套装法兰直线轴承x37。钢套g~l的作用是确保法兰直线轴承同轴定位及钢板f6与钢板d4、钢板e5之间平行且等间距。通过螺栓将钢板f6与钢板d4、钢板e5之间夹持的钢套g~l固定,组成第二套滚轮支架。
21.两套滚轮支架通过光轴a45穿入法兰直线轴承a7、g14、m26、s32,光轴b46穿入法兰直线轴承b8、h15、n27、t33,光轴c47穿入法兰直线轴承c9、i16、o28、u34,光轴d48穿入法兰直线轴承d10、j17、p29、v35,光轴e49穿入法兰直线轴承e11、k18、q30、w36,光轴f50穿入法兰直线轴承f12、l19、r31、x37,两套滚轮之间通过各直线轴承固定于各光轴及可以在各光轴上移动,两套滚轮支架之间的距离通过正反牙丝杠51与法兰螺母a13、法兰螺母b44进行调节,进而调节钢管a119与钢管b120形成的对接焊缝的间隙调节。正反牙丝杠51通过手轮a52进行旋转。
22.滚轮a61的中心穿过轴a65,滚轮a61与轴a65之间设有键槽与键,确保同步运转,轴a65两端分别安装轴承座a53、轴承座b54。滚轮b62的中心穿过轴b66,滚轮b62与轴b66之间设有键槽与键,确保同步运转,轴b66两端分别安装轴承座c55、轴承座d56,所述滚轮a61、滚轮b62通过轴承座及轴分别安装在第一套滚轮支架的钢板a1、钢板b2上及钢板a1、钢板c3上。
23.滚轮c63中心穿过轴c67,滚轮c63与轴c67之间设有键槽与键,确保同步运转,轴c67两端分别安装轴承座e57、轴承座f58。滚轮d64中心穿过轴d68,滚轮d64与轴d68之间设有键槽与键,确保同步运转,轴d68两端分别安装轴承座g59、轴承座h60,所述滚轮c63、滚轮d64通过轴承座及轴分别安装于第二套滚轮支架的钢板d4、钢板f6上及钢板e5、钢板f6上。
24.滚轮e69通过轴e70固定于滚轮座a71,光轴g72、光轴h73、光轴i74、光轴j75分别穿过固定在螺母a80上的直线轴承a76、直线轴承b77、直线轴承c78、直线轴承d79,所述光轴g72、光轴h73、光轴i74、光轴j75一端固定于滚轮座a71;丝杠a81一端固定手轮b85,另一端穿过螺母a80、弹簧a82、压力轴承a83、滚轮座a71并通过锁紧螺母a84固定其端部。所述丝杠a81可以调节滚轮e69与螺母a80之间的距离,螺母a80通过螺栓固定在第一套滚轮支架的钢板a1、钢板b2上。
25.滚轮f86通过轴f87固定于滚轮座b88,光轴k89、光轴l90、光轴m91、光轴n92分别穿过固定在螺母b97上的直线轴承e93、直线轴承f94、直线轴承g95、直线轴承h96,所述光轴k89、光轴l90、光轴m91、光轴n92一端固定于滚轮座b88;丝杠b98一端固定手轮c102,另一端穿过螺母b97、弹簧b99、压力轴承b100、滚轮座b88并通过锁紧螺母b101固定其端部。所述丝杠b98可以调节滚轮f86与螺母b97之间的距离,螺母b97通过螺栓固定在第二套滚轮支架的钢板d4、钢板f6上。
26.步进电动机a103固定于钢板a1,输出轴安装同步带轮a104,同步带轮b105安装于轴a65,同步带a106安装于同步带轮a104和同步带轮b105之间,实现了步进电动机a103对滚轮a61的驱动。步进电动机b107固定于钢板a1,输出轴安装同步带轮c108,同步带轮d109安装于轴b66,同步带b110安装于同步带轮c108和同步带轮d109之间,实现了步进电动机b107对滚轮b62的驱动。
27.步进电动机c111固定于钢板f6,输出轴安装同步带轮e112,同步带轮f113安装于轴c67,同步带c114安装于同步带轮e112和同步带轮f113之间,实现了步进电动机c111对滚
轮c63的驱动。步进电动机d115固定于钢板f6,输出轴安装同步带轮g116,同步带轮h117安装于轴d68,同步带d118安装于同步带轮g116和同步带轮h117之间,实现了步进电动机d115对滚轮d64的驱动。
28.钢管a119装夹于滚轮a61、滚轮b62和滚轮e69之间,通过手轮b85旋转丝杠a81、弹簧a82、压力轴承a83、滚轮座a71、轴e70实现对钢管a119的夹紧;所述的钢管b120装夹于滚轮c63、滚轮d64和滚轮f86之间,通过手轮c102旋转丝杠b98、弹簧b99、压力轴承b100、滚轮座b88、轴f87实现对钢管b120的夹紧。
29.弧形滑轨121、弧形齿条123固定于钢板a1上,调整焊枪145的倾角;弧形滑轨的滑块122安装在弧形滑轨121上,齿轮124安装于涡轮蜗杆减速箱126且输出轴与弧形齿条123啮合,行星减速步进电机125安装于涡轮蜗杆减速箱126输入端并拖动齿轮124;纵向滑移台固定板127固定于弧形滑轨的滑块122及涡轮蜗杆减速箱126上。
30.纵向滑移台128安装于纵向滑移台固定板127上,步进电动机e132通过电机固定板134固定于纵向滑移台128,同步带轮i129安装在纵向滑移台128上,同步带轮j130安装在步进电动机e132上,步进电动机e132通过安装于同步带轮i129和同步带轮j130上的同步带e131实现对纵向滑移台滑块133的移动控制。
31.横向滑移台连接板135安装在纵向滑移台滑块133上,横向滑移台136固定于滑移台连接板135,同步带轮k140安装于步进电动机f137输出轴上,同步带轮l141安装于横向滑移台136轴上,步进电动机f137通过安装于同步带轮k140和同步带轮l141上的同步带f142实现对横向滑移台滑块138的移动控制,t型铝材139固定于横向滑移台滑块138上,焊枪固定板143一端安装于t型铝材139,另一端安装焊枪固定夹具144,焊枪145夹持于焊枪固定夹具144中。
32.实施例:焊管前准备:旋转滚轮支架上的手轮b85,将滚轮e69远离滚轮架中心,将钢管a119从滚轮架开口处装入滚轮架,旋转滚轮架上的手轮b85,让滚轮e69逐渐靠近并顶紧钢管a119,此时钢管a119应该被限制于滚轮a61、滚轮b62、滚轮e69之间,顶紧过程中注意调整钢管坡口位置应该位于两个滚轮支架的中心。旋转滚轮支架上的手轮c102,将滚轮f86远离滚轮架中心,将钢管b120从滚轮架开口处装入滚轮架,旋转滚轮架上的手轮c102,让滚轮f86逐渐靠近并顶紧钢管b120,此时钢管b120应该被限制于滚轮c63、滚轮d64、滚轮f86之间,顶紧过程中注意调整钢管坡口位置应该位于两个滚轮支架的中心。调整手轮a52以保证焊缝间隙合适。滚轮支架初始位置姿态应该是焊枪145位置在钢管正上方即零点位置,通过控制系统控制各个步进电机运转调整焊枪145倾角、焊枪145横向及纵向位置。
33.焊接开始:操作控制系统启动焊接、控制自动全位置焊接装置绕钢管a119、钢管b120从手轮a52向滚轮支架中心看逆时针方向旋转,根据需要可以控制焊枪横向摆动电弧焊接,如果选用激光视觉传感器及焊缝自动跟踪系统可以实现焊缝横向、纵向的自动跟踪,也可以人工通过减光镜观察焊缝,人工调整焊枪145的横、纵向位置,确保焊丝实时对准焊缝,在自动全位置焊接装置旋转至8点钟位置时,需要对第一道焊缝起弧点焊缝进行打磨,确保焊接结束时整个焊缝均匀熔透。
34.焊接结束:当全位置焊接完毕后,操作控制系统停止焊接,此时电弧熄灭,自动全位置焊接装置停止运转,焊枪停止摆动,自动上升至一定高度,停止等待下一道焊缝焊接。
全部焊接结束后,旋转手轮b85、手轮c102松开滚轮e69及滚轮f86将全位置自动焊接装置移动,焊后钢管从全位置自动焊接装置开口处移出。
35.综上所述,本发明提供了小直径钢管对接焊缝全位置自动焊接装置,解决了小直径钢管对接焊缝全位置焊接对高级手工焊接人员的依赖、焊接质量低、焊接效率低的问题、提高焊接质量及焊接生产效率,实现了小直径钢管对接焊缝全位置自动焊接。
36.以上所述仅为本发明的优选实例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡对本发明所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1