一体式智能激光焊接机器人的制作方法
1.本发明涉及激光焊接领域,具体涉及一种一体式智能激光焊接机器人。
背景技术:
2.激光焊接是利用高能量密度的激光束作为热源的一种高效精密焊接方法。激光焊接是激光材料加工技术应用的重要方面之一。近年来,经过研究人员不断的探索和创新,激光焊接机构终于被成功开发和应用,并且在某些领域中,传统的焊接机构已经完全被激光焊接机构所取代。激光焊接技术之所以可以被广泛应用,是因其独有的优势。激光焊接具有焊接速度快、热影响区小、焊接应力和变形小,适用于微型零件,适合于在玻璃制成的密封容器里焊接被合金等剧毒材料等优点。激光焊接虽然有上述诸多优点,但是在实际应用中人们也发现了激光焊接的许多不足之处。
3.传统的激光焊接机桥接性差,焊缝接头对准的平整度和精度都较差,且工件焊接过程中焊面的调节需要人工手动完成,使得在对工件进行激光焊接作业的过程中金属材料对激光的吸收率降低,进而使得激光的能量利用率降低,影响激光束的聚焦效果和激光焊接的整体质量。
技术实现要素:
4.发明目的:提供一种一体式智能激光焊接机器人,以解决现有技术存在的上述问题。
5.技术方案:一种一体式智能激光焊接机器人,包括传固定组件、抛光组件和焊接组件三个组成部分。
6.其中,固定组件包括输送板、驱动机构和夹持机构三个部分;所述输送板用于对整体部件进行承载和输送;所述驱动机构与所述输送板相连,用于对所要进行焊接工件进行驱动夹持作业;所述夹持机构置于所述输送板工作面表面,用于对所要进行焊接工件进行夹持固定作业。
7.抛光组件包括基座、动力机构和抛光机构三个部分;所述基座置于所述输送板一侧,用于所述抛光组件各部件的承载与定位;所述动力机构与所述基座相连,用于为所述抛光组件的整体作业提供预定的电力驱动;所述抛光机构置于所述基座靠近所述输送板一侧面处,用于对所要进行焊接作业的工件焊面进行抛光打磨作业。
8.焊接组件包括定位座、机械臂机构和焊接机构三个部分;所述定位座置于所述输送板一侧,用于所述焊接组件各部件的承载与定位;所述机械臂机构与所述定位座相连,用于所述焊接组件作业位置的调节;所述焊接机构与所述机械臂机构相连,用于对工件进行激光焊接作业。
9.在进一步的实施例中,所述驱动机构包括滑动座、升降电机和驱动装置三个部分。所述滑动座与所述输送板滑动连接,可沿所述输送板工作面表面进行滑动调节,用于所述驱动机构整体作业位置的调节;所述升降电机置于所述滑动座工作面表面,可沿与所述输
送板垂直方向进行伸缩作业,用于所述驱动机构整体作业高度的调节;所述驱动装置置于所述升降电机工作面表面,用于为所述驱动机构的整体作业提供预定的驱动电力。
10.在进一步的实施例中,所述驱动装置包括垫板、驱动电机、伸缩气缸和推板四个部分。所述垫板置于所述升降电机远离所述输送板的一端处,用于所述驱动装置各部件的承载与定位;驱动电机通过操作台置于所述垫板工作面表面,用于提供预定的驱动电力;所述伸缩气缸一端与所述驱动电机相连,并电路连通,可沿与所述输送板水平方向进行伸缩作业;所述推板与所述伸缩气缸的另一端相连,可跟随所述伸缩气缸的伸缩作业进行相应的位置调节;所述推板工作面表面设有用于对焊接工件进行辅助固定的辅助夹持装置。
11.在进一步的实施例中,所述辅助夹持装置包括转接盘、旋转盘和辅助板三个组成部分。所述转接盘置于所述推板工作面表面,用于为所述辅助夹持装置的各个部件进行承载和定位;所述旋转盘与所述转接盘通过滚珠轴承相连,使得所述旋转盘可通过所述滚珠轴承绕与所述转接盘的轴承连接点进行全方位转动;所述辅助板置于所述旋转盘工作面表面,具有预定的收缩性和夹持空间,可跟随所述旋转盘的转动而转动。
12.在进一步的实施例中,所述夹持机构包括调节座、伸缩杆、挡板、夹持板和夹持电机五个部分。所述调节座置于所述输送板工作面表面,可沿所述输送板工作面表面进行滑动调节,用于所述夹持机构作业位置的调整;所述伸缩杆置于所述调节座工作面表面,可沿所述调节座工作面表面进行伸缩调节作业;所述挡板置于所述伸缩杆工作面表面,且一面设有具有预定倾斜角度的斜坡;所述夹持板与所述挡板滑动连接,可沿所述挡板表面进行滑动调节,且所述夹持板具有预定的弯折弧度与伸缩性;所述夹持电机置于所述伸缩杆一侧,用于为所述夹持机构提供预定的作业驱动电力,可跟随所述伸缩杆的调节而移动;所述挡板为多个,所述夹持板置于多个所述挡板之间,且多个所述挡板之间的斜坡面为相对设置;所述夹持板工作面表面每隔预定距离处设有具有预定伸缩性的膨胀夹块,所述膨胀夹块的作业长度与所述夹持板的作业宽度相等。
13.在进一步的实施例中,所述定位机构包括定位板、升降台和支撑台三个部分。所述定位板置于多个所述输送板一侧,并覆盖过多个所述输送板工作面表面,用于所述定位机构各部件的承载与作业位置限定;所述升降台置于所述定位板工作面表面,可沿与所述定位板垂直方向进行升降调节作业;所述支撑台置于所述升降台远离所述定位板的一端,用于对进行 焊接作业工件的焊缝处进行承托,且所述支撑台具有预定的弯折弧度。
14.在进一步的实施例中,所述动力机构包括动力电机、转动轮和传动轮三个部分。所述动力电机置于所述基座一侧边处,且通过罩板与所述基座相连;所述罩板中空,所述动力电机贯穿过所述罩板,延伸至所述罩板的中空腔室内;所述转动轮置于所述动力电机延伸至所述罩板中空腔室内一端处,可绕与所述动力电机的连接点进行转动;所述基座靠近所述输送板的一面设有开放式通孔,所述罩板贯穿过所述基座表面的开放式通孔,并向靠近所述输送板的方向延伸预定距离;所述传动轮置于所述罩板靠近所述输送板的一端处,并通过传送履带与所述转动轮相连,可跟随所述转动轮的转动而传动。
15.在进一步的实施例中,所述抛光机构包括衔接板、抛光板和壳板三个部分。所述衔接板与所述罩板相连,并设有具有预定收容性的开放通孔,所述开放通孔内设有第二传动轮;所述第二传动轮与所述传动轮通过连接杆相互连通,可跟随所述传送轮的转动而转动;所述抛光板通过螺栓与所述第二传动轮相连,可跟随所述第二传动轮的转动而转动,用于
对焊接工件的焊接面进行抛光打磨作业;所述壳板置于所述衔接板靠近所述抛光板的一面处,并以预定弧形面积将所述抛光板罩住。
16.在进一步的实施例中,所述机械臂机构包括定位盘、旋转臂、延伸臂和作业臂四个部分。所述定位盘与所述定位座相连,且一侧设有发电电机,用于所述机械臂机构作业位置的限定和各部件的承载;所述旋转臂置于所述定位盘工作面表面,并与所述发电电机电性连接,可绕与所述定位盘的连接点进行转动;所述延伸臂一端与所述旋转臂轴接,可绕与所述旋转臂的连接点进行转动;所述作业臂与所述延伸臂的另一端轴接,可绕与所述延伸臂的连接点进行转动。
17.在进一步的实施例中,所述焊接机构包括轴接电机、转盘和焊接管三个部分;所述轴接电机与所述作业臂靠近所述输送板的一端轴接,可绕与所述作业臂的连接点进行转动;所述转盘与所述轴接电机相连,可在所述轴接电机的驱动下进行旋转调节作业;所述焊接管与所述转盘相连,可跟随所述转盘的转动进行作业位置的调节,用于对工件进行激光焊接作业。
18.有益效果:本发明涉及一种一体式智能激光焊接机器人,包括固定组件、抛光组件和焊接组件。固定组件包括输送板、驱动机构和夹持机构;输送板用于整体的输送,驱动机构与输送板相连,夹持机构置于输送板表面。抛光组件包括基座、动力机构和抛光机构;基座置于所述输送板一侧,动力机构与所述基座相连,抛光机构置于基座靠近输送板一侧面处;焊接组件包括定位座、机械臂机构和焊接机构;定位座置于输送板一侧,机械臂机构与定位座相连,焊接机构与机械臂机构相连。通过抛光组件对工件的焊面进行抛光,使得焊缝更为贴合;再通过驱动机构与夹持机构的配合使工件在进行激光焊接作业的过程中能够保持焊缝始终处于对齐的状态,能够有效提高激光焊接作业的质量。同时,在驱动机构和夹持机构的配合下,可自主对工件进行焊面的调节,实现工件的全方位焊接,无需人工进行焊面的调节,进一步提高了激光焊接的作业效率和安全性。
附图说明
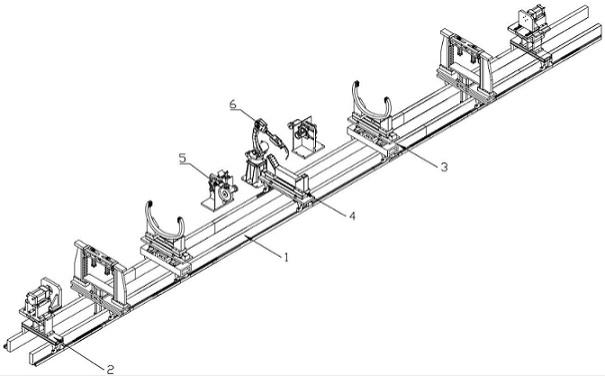
19.图1为本发明整体的示意图。
20.图2为本发明所述驱动机构的整体示意图。
21.图3为本发明所述夹持机构的整体示意图。
22.图4为本发明所述定位机构的整体示意图。
23.图5为本发明所述抛光组件的整体示意图。
24.图6为本发明所述焊接组件的整体示意图。
25.图7为本发明所述抛光组件局部放大剖视图。
26.图8为本发明所述限控组件的整体示意图。
27.图中各附图标记为:输送板1、驱动机构2、夹持机构3、定位机构4、抛光组件5、焊接组件6、滑动座201、升降电机202、垫板203、驱动电机204、操作台205、伸缩气缸206、推板207、转接盘208、旋转盘209、辅助板210、调节座301、伸缩杆302、挡板303、夹持板304、夹持电机305、膨胀夹块306、定位板401、升降台402、支撑台403、基座501、动力电机502、罩板503、转动轮504、传动轮505、传送履带506、衔接板507、抛光板508、壳板509、风机510、收集箱511、定位座601、定位盘602、旋转臂603、发电电机604、延伸臂605、作业臂606、轴接电机
607、转盘608、焊接管609、限控板701、限控柱702、限控梁柱703、伸缩限柱704、升降板705、限控电机706。
具体实施方式
28.在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。
29.申请人认为,传统的激光焊接机桥接性差,焊缝接头对准的平整度和精度都较差,且工件焊接过程中焊面的调节需要人工手动完成,使得在对工件进行激光焊接作业的过程中金属材料对激光的吸收率降低,进而使得激光的能量利用率降低,影响激光束的聚焦效果和激光焊接的整体质量。
30.为此,申请人设计一种一体式智能激光焊接机器人,通过抛光组件5对工件的焊面进行抛光,使得焊缝更为贴合;再通过驱动机构2与夹持机构3的配合使工件在进行激光焊接作业的过程中能够保持焊缝始终处于对齐的状态,能够有效提高激光焊接作业的质量。
31.本发明涉及的一体式智能激光焊接机器人主要包括包括传固定组件、抛光组件5和焊接组件6三个组成部分。其中,固定组件包括输送板1、驱动机构2和夹持机构3三个部分;所述输送板1用于对整体部件进行承载和输送;所述驱动机构2与所述输送板1相连,用于对所要进行焊接工件进行驱动夹持作业;所述夹持机构3置于所述输送板1工作面表面,用于对所要进行焊接工件进行夹持固定作业。抛光组件5包括基座501、动力机构和抛光机构三个部分;所述基座501置于所述输送板1一侧,用于所述抛光组件5各部件的承载与定位;所述动力机构与所述基座501相连,用于为所述抛光组件5的整体作业提供预定的电力驱动;所述抛光机构置于所述基座501靠近所述输送板1一侧面处,用于对所要进行焊接作业的工件焊面进行抛光打磨作业。焊接组件6包括定位座601、机械臂机构和焊接机构三个部分;所述定位座601置于所述输送板1一侧,用于所述焊接组件6各部件的承载与定位;所述机械臂机构与所述定位座601相连,用于所述焊接组件6作业位置的调节;所述焊接机构与所述机械臂机构相连,用于对工件进行激光焊接作业。
32.进一步优选的实施方式中,所述驱动机构2包括滑动座201、升降电机202和驱动装置三个部分。所述滑动座201与所述输送板1滑动连接,可沿所述输送板1工作面表面进行滑动调节,用于所述驱动机构2整体作业位置的调节;所述升降电机202置于所述滑动座201工作面表面,可沿与所述输送板1垂直方向进行伸缩作业,用于所述驱动机构2整体作业高度的调节;所述驱动装置置于所述升降电机202工作面表面,用于为所述驱动机构2的整体作业提供预定的驱动电力。
33.进一步优选的实施方式中,所述驱动装置包括垫板203、驱动电机204、伸缩气缸206和推板207四个部分。所述垫板203置于所述升降电机202远离所述输送板1的一端处,用于所述驱动装置各部件的承载与定位;驱动电机204通过操作台205置于所述垫板203工作面表面,用于提供预定的驱动电力;所述伸缩气缸206一端与所述驱动电机204相连,并电路连通,可沿与所述输送板1水平方向进行伸缩作业;所述推板207与所述伸缩气缸206的另一端相连,可跟随所述伸缩气缸206的伸缩作业进行相应的位置调节;所述推板207工作面表
面设有用于对焊接工件进行辅助固定的辅助夹持装置。所述推板207与所述升降电机202所提供的操作平台存在预定的距离差,及所述推板207的活动调节距离小于所述升降电机202作业宽度预定距离,使得在后期作业过程中,所述升降电机202也可对焊接工件起到预定的承托效果,避免作业过程工件掉落。且所述推板207与所述伸缩气缸206为卡接,在后期作业过程中可根据所要进行焊接工件的尺寸进行灵活的更换,所述推板207的作业操作面积大于,至少等于所要进行焊接工件的焊面面积。
34.进一步优选的实施方式中,所述辅助夹持装置包括转接盘208、旋转盘209和辅助板210三个组成部分。所述转接盘208置于所述推板207工作面表面,用于为所述辅助夹持装置的各个部件进行承载和定位;所述旋转盘209与所述转接盘208通过滚珠轴承相连,使得所述旋转盘209可通过所述滚珠轴承绕与所述转接盘208的轴承连接点进行全方位转动;所述辅助板210置于所述旋转盘209工作面表面,具有预定的收缩性和夹持空间,可跟随所述旋转盘209的转动而转动。且所述辅助板210为多个,多个所述辅助板210的转动作业轨迹与所要进行焊接工件的焊面相对应。在后期作业过程中,可通过所述辅助板210对工件焊接作业末端进行夹持辅助。
35.进一步优选的实施方式中,所述夹持机构3包括调节座301、伸缩杆302、挡板303、夹持板304和夹持电机305五个部分。所述调节座301置于所述输送板1工作面表面,可沿所述输送板1工作面表面进行滑动调节,用于所述夹持机构3作业位置的调整;所述伸缩杆302置于所述调节座301工作面表面,可沿与所述调节座301工作方向垂直方向进行伸缩调节作业;所述挡板303置于所述伸缩杆302工作面表面,且一面设有具有预定倾斜角度的斜坡;所述夹持板304与所述挡板303滑动连接,可沿所述挡板303表面进行滑动调节,且所述夹持板304具有预定的弯折弧度与伸缩性;所述夹持电机305置于所述伸缩杆302一侧,用于为所述夹持机构3提供预定的作业驱动电力,可跟随所述伸缩杆302的调节而移动;所述挡板303为多个,所述夹持板304置于多个所述挡板303之间,且多个所述挡板303之间的斜坡面为相对设置;所述夹持板304工作面表面每隔预定距离处设有具有预定伸缩性的膨胀夹块306,所述膨胀夹块306的作业长度与所述夹持板304的作业宽度相等。在后期的作业过程中,多个所述挡板303之间可沿所述伸缩杆302工作面表面进行相应的滑动调节,使得所述夹持板304可根据所要夹持工件的尺寸进行灵活度的伸缩调节,而后可启动所述夹持电机305,使得膨胀夹块306处于膨胀状态,将工件进行夹紧固定。
36.进一步优选的实施方式中,所述定位机构4包括定位板401、升降台402和支撑台403三个部分。所述定位板401置于多个所述输送板1一侧,并覆盖过多个所述输送板1工作面表面,用于所述定位机构4各部件的承载与作业位置限定;所述升降台402置于所述定位板401工作面表面,可沿与所述定位板401垂直方向进行升降调节作业;所述支撑台403置于所述升降台402远离所述定位板401的一端,用于对进行 焊接作业工件的焊缝处进行承托,且所述支撑台403具有预定的弯折弧度。在后期的作业过程中,根据实际需求也可将所述支撑台403更换为冷却台板,可对焊接过程中的工件焊缝进行及时的冷却作业。
37.进一步优选的实施方式中,所述动力机构包括动力电机502、转动轮504和传动轮505三个部分。所述动力电机502置于所述基座501一侧边处,且通过罩板503与所述基座501相连;所述罩板503中空,所述动力电机502贯穿过所述罩板503,延伸至所述罩板503的中空腔室内;所述转动轮504置于所述动力电机502延伸至所述罩板503中空腔室内一端处,可绕
与所述动力电机502的连接点进行转动;所述基座501靠近所述输送板1的一面设有开放式通孔,所述罩板503贯穿过所述基座501表面的开放式通孔,并向靠近所述输送板1的方向延伸预定距离;所述传动轮505置于所述罩板503靠近所述输送板1的一端处,并通过传送履带506与所述转动轮504相连,可跟随所述转动轮504的转动而传动。
38.进一步优选的实施方式中,所述抛光机构包括衔接板507、抛光板508和壳板509三个部分。所述衔接板507与所述罩板503相连,并设有具有预定收容性的开放通孔,所述开放通孔内设有第二传动轮505;所述第二传动轮505与所述传动轮505通过连接杆相互连通,可跟随所述传送轮的转动而转动;所述抛光板508通过螺栓与所述第二传动轮505相连,可跟随所述第二传动轮505的转动而转动,用于对焊接工件的焊接面进行抛光打磨作业;所述壳板509置于所述衔接板507靠近所述抛光板508的一面处,并以预定弧形面积将所述抛光板508罩住。所述壳板509至少留有一面与所述抛光板508面积相等或大于所述抛光板508面积的开放式通孔,用于工件的抛光进料作业。所述壳板509工作方向上方与下方的壁面均设有开放式通孔,所述壳板509工作方向上方通孔处连接有风机510,所述壳板509工作方向下方通孔处连接有收集箱511;在后期作业过程中,所述风机510启动将抛光作业过程中所产生的灰尘飞屑吹进所述壳板509工作方向下方的收集箱511内进行集中收集处理。
39.进一步优选的实施方式中,所述机械臂机构包括定位盘602、旋转臂603、延伸臂605和作业臂606四个部分。所述定位盘602与所述定位座601相连,且一侧设有发电电机604,用于所述机械臂机构作业位置的限定和各部件的承载;所述旋转臂603置于所述定位盘602工作面表面,并与所述发电电机604电性连接,可绕与所述定位盘602的连接点进行转动;所述延伸臂605一端与所述旋转臂603轴接,可绕与所述旋转臂603的连接点进行转动;所述作业臂606与所述延伸臂605的另一端轴接,可绕与所述延伸臂605的连接点进行转动。
40.进一步优选的实施方式中,所述机械臂机构包括轴接电机607、转盘608和焊接管609三个部分;所述轴接电机607与所述作业臂606靠近所述输送板1的一端轴接,可绕与所述作业臂606的连接点进行转动;所述转盘608与所述轴接电机607相连,可在所述轴接电机607的驱动下进行旋转调节作业;所述焊接管609与所述转盘608相连,可跟随所述转盘608的转动进行作业位置的调节,用于对工件进行激光焊接作业。
41.进一步优选的实施方式中,所述夹持机构3与所述驱动机构2之间进一步设有限控机构。所述限控机构包括与所述输送板1相连的限控板701,用于所述限控机构作业位置的调节;置于所述限控板701工作面表面的限控柱702,且所述限控柱702为多个;与所述限控柱702远离所述输送板1一端滑动连接的限控梁柱703,且两端均与所述限控柱702滑动连接,可沿所述限控柱702工作面表面进行滑动调节;所述限控梁柱703靠近所述输送板1的一面处滑动连接有具有预定伸缩性的伸缩限柱704;所述限控板701靠近所述限控梁柱703的一面表面设有升降板705,且所述升降板705通过限控电机706与所述限控板701相连;所述限控机构的各调节部件均与所述限控电机706电路连接。在后期作业过程中,所述限控板701可根据实际需要沿所述输送板1进行滑动调节,而后所述限控电机706启动,所述限控柱702向靠近所述输送板1的方向进行伸展调节作业,所述升降板705进行升降调节,与所述限控柱702相互配合完成对工件的初步限控;而后所述限控柱702沿所述限控梁柱703的工作面表面进行滑动调节,多个所述限控柱702向靠近工件的方向进行滑动调节,将工件进一步进行限控。在后期作业过程中,所述限控梁柱703也可根据实际需求沿所述限控柱702表面
进行滑动调节。
42.所述驱动机构2、夹持机构3和所述限控机构为多个,并以所述焊接组件6为轴,对称式分布。
43.基于上述实施例,本发明所述一体式智能激光焊接机器人的工作流程如下:首先,将所要进行焊接的工件分别通过所述焊接机构左右两侧的限控机构与所述夹持机构3进行放置;将所要进行焊接的工件放置于所述升降板705与所述夹持板304的工作表面;而后,所述驱动机构2启动沿所述输送板1工作面表面进行滑动调节,将所要进行焊接工件的末端进行承托,并通过所述辅助板210对工件末端进行夹持固定;接着,所述夹持板304通过所述伸缩杆302、调节座301以及挡板303的相互配合对工件进行收缩夹持作业,将工件进行初步的夹持固定;而后所述限控板701、伸缩限柱704和所述升降板705在所述限控电机706的驱动下进行调节限控作业,对工件的活动范围进行限定,避免在后期的抛光、焊接作业过程中工件晃动对抛光、焊接的质量产生影响。当所述限控机构调节完成后,所述膨胀夹块306启动膨胀,对工件进行进行不得夹持固定,使得工件完成牢固的固定作业。
44.接着,所述夹持机构3、限控机构与所述驱动机构2沿所述输送板1工作面表面进行滑动输送,将工件向靠近所述抛光组件5的方向进行传送;当工件移动至于所述抛光组件5相应对位置处停止传送,所述抛光组件5对工件焊面进行抛光处理作业,使得焊面平整,更有利于后期的焊缝对接。完成抛光作业后的工件继续进行传送,当直至传送至所述定位机构4处,使得所述焊接组件6左右两侧的工件焊缝通过所述支撑台403进行承托;而后,所述支撑台403进行调节,使得工件之间焊缝对齐。
45.最后,所述焊接机构启动,对工件进行焊接作业。在焊接作业过程中,考虑到工件为立体式结构,所述夹持板304可沿所述挡板303表面进行滑动转动,带动工件进行转动,进而对工件焊缝进行调节,与所述焊接机构相互配合,完成工件焊缝的全方位焊接作业。在对焊缝进行调节的过程中,所述旋转盘209沿所述转接盘208轴接点进行转动,带动所述辅助板210转动,使得所述辅助板210可配合所述夹持板304的转动,确保工件在旋转调节焊缝的作业过程中始终处于稳定状态,焊缝始终处于对齐的状态。
46.如上所述,尽管参照特定的优选实施例已经表示和表述了本发明,但其不得解释为对本发明自身的限制。在不脱离所附权利要求定义的本发明的精神和范围前提下,可对其在形式上和细节上做出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1