一种多角度柔性定位辅助装配机构的制作方法
1.本发明涉及定位辅助装配机构的技术领域,特别涉及一种多角度柔性定位辅助装配机构。
背景技术:
2.目前的技术背景是新能源汽车飞速发展,电源、电控、电机作为新能源汽车的三大核心技术,不断被突破,日益增加的新能源汽车需求,促使着新能源汽车自动化生产线快速发展,针对电源、电控、电机的自动化生产线需求猛然上升。且针对多产品可以兼容的生产线更是受到各大新能源汽车厂商的青睐,由于某些工站不便于实现自动化或自动化成本太高,某些人工操作位需要提高人工装配准确性和实效性以及人工安全性。
3.如公开号为cn109896473b的一种柔性提升装置,其公开一种包括:提升板、提升杆、横杆、连接杆、竖轴、箱式滑块、弹簧和用于提供提升动力的提升动力源;提升板安装在提升杆上,箱式滑块安装在竖轴上,横杆和提升杆均通过箱式滑块安装在竖轴上且横杆位于提升杆的上方,提升杆可在箱式滑块的孔内旋转;连接杆连接横杆对应的箱式滑块和提升板;弹簧套设在同一竖轴上的两个箱式滑块之间,该结构使用弹簧和连接杆结构实现柔性提升下降,但该结构无法根据产品放置情况施加相应的力度,使用中弹簧的回弹力固定,重型产品放入后超出弹簧弹力范围,容易发生安全事故。
技术实现要素:
4.本发明所要解决的技术问题是克服现有技术的不足,提供一种安全性能好、使用气平衡式柔性提升同时具有防呆效果的一种多角度柔性定位辅助装配机构本发明所采用的技术方案是:本发明包括支撑架、柔性提升模组、旋转模组以及夹紧定位模组,所述柔性提升模组与所述支撑架相连接,所述旋转模组设置在所述柔性提升模组相连接,所述夹紧定位模组设置在所述旋转模组的活动端,所述柔性提升模组带动旋转模组沿z轴方向作上下往复运动,所述旋转模组带动所述夹紧定位模组沿y轴方向作旋转运动。
5.进一步,所述旋转模组包括连接板、定位盘、若干感应开关、定位组件、阻尼器以及固定座,所述连接板与所述柔性提升模组的输出端相连接,所述定位盘转动连接于所述连接板上,若干感应开关和所述定位组件均设置在所述连接板上,所述定位盘上设置有若干定位槽和若干感应片,所述定位组件与若干所述定位槽相配合,若干感应片对应与若干所述感应开关相适配,所述阻尼器设置在所述连接板上并与所述定位盘限位配合,所述固定座设置在所述定位盘上并与所述夹紧定位模组定位配合。
6.进一步,所述定位组件包括定位驱动装置以及定位块,所述定位驱动装置与所述连接板固定连接,所述定位块设置在所述定位驱动装置的输出端,所述定位块设置有与所述定位槽相适配倾角。
7.进一步,所述固定座上设置有若干定位销和若干插拔销,若干所述定位销和若干
所述插拔销均与所述夹紧定位模组导向配合。
8.进一步,所述支撑板还连接有至少四组检测传感器,若干所述检测传感器与所述夹紧定位模组感应配合。
9.进一步,所述柔性提升模组包括支撑板、提升驱动装置、第一控制装置、第二控制装置以及到位传感器,所述支撑板与所述支撑架固定连接,所述提升驱动装置的活动端与所述旋转模组相连接,所述第一控制装置和所述第二控制装置均设置在所述支撑板上,所述第一控制装置和所述第二控制装置的输出端均与所述提升驱动装置相连接,所述到位传感器设置在所述提升驱动装置的活动端上并与外部产品感应配合。
10.进一步,所述夹紧定位模组包括底板、夹钳、若干防呆夹紧件、滑轨、若干支撑块以及两组连接组件,所述底板与所述旋转模组导向配合,所述夹钳设置在所述底板的下端,所述底板上设置有若干滑块,若干所述滑块与所述滑轨滑动配合,所述滑块与所述夹钳固定连接,所述滑轨的两端分别与两组所述连接组件相连接,若干所述防呆夹紧件对应设置在两组所述连接组件上并与所述底板滑动配合,若干所述支撑块设置在所述底板的边沿。
11.进一步,所述底板上还设置有若干第一支撑柱和若干第二支撑柱,若干所述第一支撑柱与外部产品导向配合,若干所述第二支撑柱与外部工装支撑配合。
12.进一步,所述防呆夹紧件设有夹紧滑块和防呆夹头,所述夹紧滑块与所述底板滑动配合,所述夹紧滑块的一端与所述连接组件固定连接,所述夹紧滑块的另一端与所述防呆夹头相连接,所述防呆夹头与产品接触的一端设置有凸块。
13.进一步,所述连接组件包括连接块以及至少两组连接杆,所述连接块与所述滑轨固定连接,所述连接块的两端分别与若干所述连接杆转动配合,若干所述连接杆的另一端对应与所述夹紧滑块转动连接。
14.本发明的有益效果是:由于本发明采用模块化结构设计,整体结构简洁紧凑,方便日常拆卸和维修,旋转模组和夹紧定位模组导向固定式设计,安装快捷降低工作难度提高工作效率,减少人力成本损耗;感应开关与定位组件配合对定位盘进行卡停定位,通过感应片和定位槽设计,实现旋转组件多角度精准止停定位,精准度高时效性好,有效提高加工效率,同时加入阻尼器使定位盘结构旋转过程带有一定的阻力,避免旋转过程不受限制,实现柔性旋转止停安装便于需要多角度对产品进行加工的工位使用;二级气压控制装置设计,确保负载和零负载过程均能实现柔性上升和下拉,确保负载平衡同时使工作人员在操作时省时省力,提高使用舒适度保证下落的准确性。
附图说明
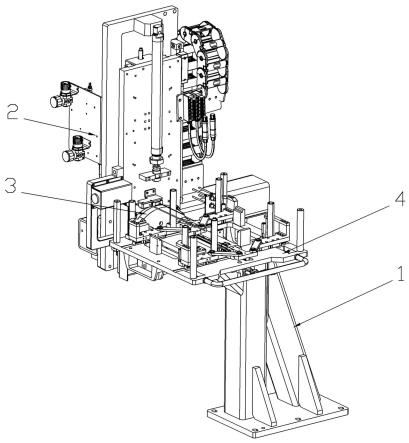
15.图1是本发明的结构示意图;图2是本发明旋转模组的结构示意图;图3是图2中a部分的局部放大图;图4是本发明旋转模组另一视角的结构示意图;图5是本发明提升模组的结构示意图;图6是本发明夹紧定位模组的结构示意图;图7是气压控制组件的结构示意图。
具体实施方式
16.如图1至图7所示,在本实施例中,本发明包括支撑架1、柔性提升模组2、旋转模组3以及夹紧定位模组4,所述柔性提升模组2与所述支撑架1相连接,所述旋转模组3设置在所述柔性提升模组2相连接,所述夹紧定位模组4设置在所述旋转模组3的活动端,所述柔性提升模组2带动旋转模组3沿z轴方向作上下往复运动,所述旋转模组3带动所述夹紧定位模组4沿y轴方向作旋转运动,所述夹紧定位模组4对外部产品或产品工作定位夹紧,所述夹紧定位模组4放入所述旋转模组3中,工作人员手动对所述旋转模组3转动一定角度并定位锁紧,所述柔性提升模组2对放入的夹紧定位组件34进行识别,控制所述柔性提升模组2输出不同的提升力,实现柔性提升和下拉,不同的产品或夹紧定位模组4决定高度和倾斜度,操作人员下拉至装配位置完成装配工序。采用模块化结构设计,整体结构简洁紧凑,方便日常拆卸和维修,旋转模组3和夹紧定位模组4导向固定式设计,安装快捷降低工作难度提高工作效率,减少人力成本损耗。
17.在本实施例中,所述旋转模组3包括连接板31、定位盘32、若干感应开关33、定位组件34、阻尼器35以及固定座36,所述连接板31与所述柔性提升模组2的输出端相连接,所述定位盘32转动连接于所述连接板31上,若干感应开关33和所述定位组件34均设置在所述连接板31上,所述定位盘32上设置有若干定位槽37和若干感应片,所述定位组件34与若干所述定位槽37相配合,若干感应片对应与若干所述感应开关33相适配,所述阻尼器35设置在所述连接板31上并与所述定位盘32限位配合,所述固定座36设置在所述定位盘32上并与所述夹紧定位模组4定位配合,所述感应开关33为到位传感器25,所述感应开关33与外部控制机构导通配合,外部控制机构结构到所述感应开关33的信号后,控制所述定位组件34顶出卡停所述定位盘32,所述固定座36设有加强筋,所述固定座36能承受重量更大的产品或工装夹具适用性好,所述阻尼器35与所述定位盘32的尾端限位配合,所述定位盘32需要转动时需要外部工作人员施加一定的力才能将其转动。采用感应开关33与定位组件34配合对定位盘32进行卡停定位,通过感应片和定位槽37设计,实现旋转组件多角度精准止停定位,精准度高时效性好,有效提高加工效率,同时加入阻尼器35使定位盘32结构旋转过程带有一定的阻力,避免旋转过程不受限制,实现柔性旋转止停安装便于需要多角度对产品进行加工的工位使用。
18.在本实施例中,所述定位组件34包括定位驱动装置341以及定位块342,所述定位驱动装置341与所述连接板31固定连接,所述定位块342设置在所述定位驱动装置341的输出端,所述定位块342设置有与所述定位槽37相适配倾角,所述定位驱动装置341为顶推气缸,所述定位块342和所述定位槽37的倾角为50度到80度之间。采用带倾角的定位块342和定位槽37结构,实现定位盘32精准快速定位,倾角设计具有一定的导向作用,对定位过程进行微调导正精准度高。
19.在本实施例中,所述固定座36上设置有若干定位销361和若干插拔销362,若干所述定位销361和若干所述插拔销362均与所述夹紧定位模组4导向配合,若干所述定位销361与所述夹紧定位模组4配合的一端设置有圆形,所述圆角设计具有导向性,是所述夹紧定位模组4快速落位,提高安装速度,若干所述插拔销362与所述夹紧定位模组4配合一端设置有螺纹,通过螺纹配合将所述夹紧定位模组4固定在所述固定座36上,使用简单方便高效。
20.在本实施例中,所述连接板31还连接有至少四组检测传感器311,若干所述检测传
感器311与所述夹紧定位模组4感应配合,所述夹紧定位模组4设有相应的定位片,所述定位片与若干所述检测传感器311相配合,所述检测传感器311通过检测到的定位片反馈至外部控制机构,快速识别待加工产品的型号和类型,进而提前设定所述柔性提升模组2升降力度。
21.如图5和图7所示,在本实施例中,所述柔性提升模组2包括支撑板21、提升驱动装置22、第一控制装置23、第二控制装置24以及到位传感器25,所述支撑板21与所述支撑架1固定连接,所述提升驱动装置22的活动端与所述旋转模组3相连接,所述第一控制装置23和所述第二控制装置24均设置在所述支撑板21上,所述第一控制装置23和所述第二控制装置24的输出端均与所述提升驱动装置22相连接,所述到位传感器25设置在所述提升驱动装置22的活动端上并与外部产品感应配合,所述提升驱动装置22为伸缩气缸,所述第一控制装置23和所述第二控制装置24为调压阀,所述第一控制装置23为低压调压阀,所述第二控制装置24为高压调压阀,内部还设置有气压控制组件26,所述气压控制组件26包括第一电磁阀261、先导式节流阀262和第二电磁阀263,所述第一电磁阀261、所述第二电磁阀263、所述先导式节流阀262、所述第一控制装置23和所述第二控制装置24相配合组成感应控制气路结构,所述支撑板21一侧设置有常开按钮211,所述常开按钮211控制所述第二电磁阀263开关状态,所述第二电磁阀263与所述先导式节流阀262导通连接,所述到位传感器25控制所述第一电磁阀261的导通状态,所述第一控制装置23和第二控制装置24均与所述第一电磁阀261导通连接,所述提升驱动装置22的活动端一侧设置有位移传感器,没有按下常开按钮211时,第二电磁阀263处于关闭状态,先导式节流阀262没有导通,使提升驱动装置22止停,不能上下移动,按下常开按钮211时,第二电磁阀263处于导通状态,先导式节流阀262与通过第二电磁阀263与气源相连接,操作人员可实现提升驱动装置22上下移动,实现柔性提升和停留。采用二级气压控制装置设计,确保负载和零负载过程均能实现柔性上升和下拉,确保负载平衡同时使工作人员在操作时省时省力,提高使用舒适度保证下落的准确性。
22.在本实施例中,所述夹紧定位模组4包括底板41、夹钳42、若干防呆夹紧件43、滑轨44、若干支撑块45以及两组连接组件46,所述底板41与所述旋转模组3导向配合,所述夹钳42设置在所述底板41的下端,所述底板41上设置有若干滑块,若干所述滑块与所述滑轨44滑动配合,所述滑块与所述夹钳42固定连接,所述滑轨44的两端分别与两组所述连接组件46相连接,若干所述防呆夹紧件43对应设置在两组所述连接组件46上并与所述底板41滑动配合,若干所述支撑块45设置在所述底板41的边沿,所述夹钳42为扳手推块结构,推块与滑轨44固定连接,拨动扳手,带动滑轨44在底板41上做前后往复运动,进而使与所述连接组件46相配合的防呆夹紧件43作打开夹紧运动,所述支撑块45的一端设置有阶梯,所述阶梯与产品或产品工装顶压配合。采用夹钳42联动结构,拨动夹钳42实现防呆夹紧件43的打开与锁紧,结构简单使用方便,防呆夹紧件43设计,放反是会发生干涉,夹钳42无法锁紧,起到防呆提醒作用。
23.在本实施例中,所述底板41上还设置有若干第一支撑柱47和若干第二支撑柱48,若干所述第一支撑柱47与外部产品导向配合,若干所述第二支撑柱48与外部工装支撑配合,所述第一支撑柱47为圆头结构,便于产品快速落位,所述第二支撑柱48为工装支撑柱,与工装夹具相连接。
24.在本实施例中,所述防呆夹紧件43设有夹紧滑块431和防呆夹头432,所述夹紧滑
块431与所述底板41滑动配合,所述夹紧滑块431的一端与所述连接组件46固定连接,所述夹紧滑块431的另一端与所述防呆夹头432相连接,所述防呆夹头432与产品接触的一端设置有凸块,所述凸块设有圆角结构,避免与产品刚性接触,划伤产品表面。
25.在本实施例中,所述连接组件46包括连接块461以及至少两组连接杆462,所述连接块461与所述滑轨44固定连接,所述连接块461的两端分别与若干所述连接杆462转动配合,若干所述连接杆462的另一端对应与所述夹紧滑块431转动连接,所述连接块461为t型结构,联动设计结构紧凑简单,使用方便。
26.本发明的工作原理:当定位盘32转动时,当感应片转到感应开关33位置时,感应开关33会给出信号,控制定位驱动装置341伸出,定位块342会插进定位盘32的定位槽37内,使定位盘32停止不动,多设置几个槽开和定位盘32零件中多做几个定位槽37,就可以实现定位盘32的多角度精确定位,由于阻尼器35的作用,可以使固定架在旋转到任意角度停留,定位销361和插拔销362的作用是定位和锁住夹紧定位模组4;当夹钳42向外旋转时,防呆夹紧件43会沿着滑轨44的轨道向外移动,此时,可以任意拿放产品;当夹钳42向内旋转时,防呆夹紧件43会沿着滑轨44的轨道向内移动,此时,产品将被定位夹紧,之后可以进行在固定架上旋转任意角度而不脱落,此外防呆夹紧件43还有防呆作用产品放反,会造成在夹紧时产品与防呆夹紧件43干涉,起到防呆的作用;实施例1不按常开按钮211且无产品落位时,第二电磁阀263处于关闭状态,到位传感器检测到没有产品落位时将信号反馈至第一电磁阀261,气流从第一电磁阀261与第一控制装置流进先导式节流阀262中,第二电磁阀263气路不导通使整个气路处于封闭状态,进而提升驱动装置22定位止停;实施例2不按常开按钮211且有产品落位时,第二电磁阀263处于关闭状态,到位传感器检测到产品落位时将信号反馈至第一电磁阀261,第一电磁阀261与第二控制装置导通,气流从第一电磁阀261与第二控制装置流进先导式节流阀262中,由于第二电磁阀263气路不导通使整个气路处于封闭状态,提升驱动装置22负载情况下定位止停;实施例3按下常开按钮211且产品未落位时,第二电磁阀263处于开启状态,气流经第二电磁阀263流入先导式节流阀262中使气路导通,到位传感器未检测到产品落位将信号反馈至第一电磁阀261,第一电磁阀261与第一控制装置导通,气流从第一电磁阀261与第一控制装置流入先导式节流阀262中,气路气压达到不负载情况下平衡,使提升驱动装置22实现不负载上下柔性运动;实施例4按下常开按钮211且产品落位时,第二电磁阀263处于开启装填,气流经第二电磁阀263流入先导式节流阀262中使气路导通,到位传感器检测到产品已落位并将信号传送至第一电磁阀261,第一电磁阀261与第二控制装置导通,气流从第二电磁阀263与第二控制装置流入先导式节流阀262中,气路气压达到负载情况下平衡,是提升驱动装置22实现负载上下柔性运动。
27.虽然本发明的实施例是以实际方案来描述的,但是并不构成对本发明含义的限制,对于本领域的技术人员,根据本说明书对其实施方案的修改及与其他方案的组合都是显而易见的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1