一种导联线焊接生产线的制作方法
1.本发明涉及自动化设备技术领域,尤其涉及一种导联线焊接生产线。
背景技术:
2.在一种导联线焊接工艺中,需要将一根粗导联线分成的若干细电线,分别插入一个电极头并进行焊接(如图5所示)。其中导联线和电极头的输送、定位、插接、焊接和下料都比较困难,很难实现高度自动化,成本也比较高。目前的大多数自动化生产线,大多采用半自动化的加工方式,不仅加工过程复杂,加工效率低,无法满足大批量的产品加工,也不适合导联线这类插线焊接产品的生产(如cn113909914a公开的自动化生产线)。
3.本发明就是基于这种情况做出的。
技术实现要素:
4.本发明目的是克服现有技术的不足,提供一种自动化程度更高、加工效率高的导联线焊接生产线。
5.本发明是通过以下技术方案实现的:
6.为解决上述技术问题,本发明提供一种导联线焊接生产线,用于将导联线插接在电极头上并焊接,包括机架,所述机架上设有主输送线、以及沿主输送线从后往前依次设置的剪线机构、剥线机构、拧线机构、插线机构、焊接机构和下料机构,所述主输送线后端还设有导联线上料工位,所述主输送线上设有用于装夹电极头的第一夹具和用于装夹导联线的第二夹具,且所述主输送线能将第一夹具和第二夹具从后往前输送,所述主输送线的左右两侧分别设有用于回流第一夹具的第一回流线和用于回流第二夹具的第二回流线,所述第一回流线上设有用于将电极头装到第一夹具上的电极头上料机构。
7.为了进一步解决本发明所要解决的技术问题,本发明提供的一种导联线焊接生产线中,所述主输送线包括沿前后方向设置的第一传送轨道和第二传送轨道,且所述第一夹具滑动配合在第一传送轨道上,所述第二夹具滑动配合在第二传送轨道上,所述主输送线还包括能推动第一夹具和第二夹具往前移动的主输送驱动装置。
8.为了进一步解决本发明所要解决的技术问题,本发明提供的一种导联线焊接生产线中,所述拧线机构包括固定台、设在固定台上的夹线定位组件、滑动连接在固定台上的移动台、以及用于驱动移动台左右滑动的位移驱动器,所述移动台上设有旋转驱动器,所述旋转驱动器输出端设有若干可旋转的拧线组件,各个所述拧线组件均包括夹爪气缸以及设在夹爪气缸输出端的拧线夹爪。
9.为了进一步解决本发明所要解决的技术问题,本发明提供的一种导联线焊接生产线中,所述插线机构包括用于夹持导联线且能沿上下左右移动的夹线组件、用于夹持电极头并能翻转电极头的翻转组件、用于驱动翻转组件左右方向移动以使得导联线插入竖向状态电极头的平移组件,且所述翻转组件翻转的轴心沿前后方向。
10.为了进一步解决本发明所要解决的技术问题,本发明提供的一种导联线焊接生产
线中,所述平移组件包括平移驱动器、以及设在平移驱动器输出端的平移架,所述翻转组件包括转动连接在平移架上的翻转架,所述翻转架连接有翻转驱动器,所述翻转架上设有用于夹持第一夹具的夹具固定装置、用于压线头的压线组件、用于热熔的热压组件。
11.为了进一步解决本发明所要解决的技术问题,本发明提供的一种导联线焊接生产线中,所述焊接机构包括焊接头、以及用于驱动焊接头上下、左右移动的位移装置;所述焊接机构的前方设有用于将焊点压低的热压机构,所述热压机构包括设在热压驱动器,所述热压驱动器输出端设有能升降的发热组件。
12.为了进一步解决本发明所要解决的技术问题,本发明提供的一种导联线焊接生产线中,所述第一夹具上设有用于启闭第一夹具的夹具盖、以及用于锁定夹具盖的第一卡扣,且所述第一卡扣的一端被往下顶压时就会解锁夹具盖;所述第二夹具上设有用于启闭第二夹具的第二卡扣,且所述第二卡扣的一端被往下顶压时就会打开第二夹具。
13.为了进一步解决本发明所要解决的技术问题,本发明提供的一种导联线焊接生产线中,所述下料机构包括主输送线一侧且用于打开第一夹具的开盖装置、设在主输送线前端的下方且用于往上顶出第一夹具中电极头的顶出装置、以及设在顶出装置上方的两轴平移模组,且所述两轴平移模组的输出端能上下前后移动,所述两轴平移模组的输出端设有取料夹持组件、以及用于打开第二夹具的顶压装置、用于抓取电极头的真空吸附组件。
14.为了进一步解决本发明所要解决的技术问题,本发明提供的一种导联线焊接生产线中,所述第一回流线包括第一回流输送装置、用于将主输送线前端输出的第一夹具转移到第一回流输送装置的第一转移装置;所述第二回流线包括第二回流输送装置、用于将主输送线前端输出的第二夹具转移到第二回流输送装置的第二转移装置。
15.为了进一步解决本发明所要解决的技术问题,本发明提供的一种导联线焊接生产线中,所述电极头上料机构包括电极头抓取组件、以及转动连接在机架上且沿前后方向布置的传动轴,所述传动轴的一端连接有上料驱动装置,所述传动轴的另一端和电极头抓取组件之间设有能带动电极头抓取组件上下左右移动的传动结构,所述机架和传动结构之间设有能够限定电极头抓取组件沿倒u形路径来回运动的导向结构。
16.与现有技术相比,本发明有如下优点:
17.本发明能够实现剪线、剥线、拧线、电极头上料、插线、焊接和下料和两个夹具的回流,整个过程自动化,自动化程度更高,简化了加工过程,极大提高了产品的加工效率,使之可以满足大批量的产品加工。
附图说明
18.下面结合附图对本发明的具体实施方式作进一步详细说明,其中:
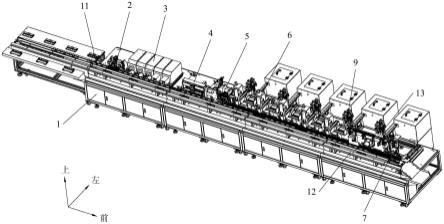
19.图1是本发明立体结构示意图;
20.图2是主输送线、第一回流线、第二回流线处的结构示意图一;
21.图3是主输送线、第一回流线、第二回流线处的分解示意图;
22.图4是主输送线、第一回流线、第二回流线处的结构示意图二;
23.图5是第一夹具和第二夹具的结构示意图;
24.图6是拧线机构的结构示意图;
25.图7是拧线机构的分解图;
26.图8是插线机构的结构示意图;
27.图9是插线机构的分解图;
28.图10是焊接机构的结构示意图;
29.图11是热压机构的结构示意图;
30.图12是下料机构的分解图;
31.图13是电极头上料机构的结构示意图;
32.图14是电极头上料机构的分解图。
具体实施方式
33.为了使本领域的技术人员更好地理解本发明的技术方案,下面结合附图和具体实施方式对本发明作进一步的详细说明。
34.如图1至图14所示的一种导联线焊接生产线,用于将导联线插接在电极头上并焊接,包括机架1,所述机架1上设有主输送线11、以及沿主输送线11从后往前依次设置的剪线机构2、剥线机构3、拧线机构4、插线机构5、焊接机构6和下料机构7,所述主输送线11后端还设有导联线上料工位(人工将导联线装在第二夹具82上),所述主输送线11上设有用于装夹电极头的第一夹具81和用于装夹导联线的第二夹具82,且所述主输送线11能将第一夹具81和第二夹具82从后往前输送,所述主输送线11的左右两侧分别设有用于回流第一夹具81的第一回流线12和用于回流第二夹具82的第二回流线13,所述第一回流线12上设有用于将电极头装到第一夹具81上的电极头上料机构9。其中,剪线机构2(剪线机)、剥线机构3(剥线机)比较常见,这里不再赘述。
35.本发明能够实现剪线、剥线、拧线、电极头上料、插线、焊接和下料和两个夹具的回流,整个过程自动化,自动化程度更高,简化了加工过程,极大提高了产品的加工效率,使之可以满足大批量的产品加工。
36.此外,本发明采用两个夹具分别装夹导联线和电极头,方便导联线和电极头的传送、定位和加工,并且本发明采用第一回流线12和第二回流线13分别回流第一夹具81和第二夹具82,循环利用第一夹具81和第二夹具82。
37.更具体的,如图1-图4所示,所述主输送线11包括沿前后方向设置的第一传送轨道111和第二传送轨道112,且所述第一夹具81滑动配合在第一传送轨道111上,所述第二夹具82滑动配合在第二传送轨道112上,所述主输送线11还包括能推动第一夹具81和第二夹具82往前移动的主输送驱动装置113。
38.所述主输送驱动装置113包括设在机架1上的主输送驱动器1131(主输送驱动器1131优选为气缸)、以及沿前后方向滑动连接(此处滑动连接是指通过滑动副滑动连接)在机架1上的传动杆1132,且所述传动杆1132连接在主输送驱动器1131的输出端,所述传动杆1132上设有能单向向前推动第一夹具81或第二夹具82(只需推第一夹具81和第二夹具82其中一个即可,图4中所示的是推动第二夹具82)的推块组件1133。本发明采用主输送驱动器1131驱动传动杆1132前后滑动、传动杆1132上的推块组件1133单向向前推动第一夹具81或第二夹具82的方式,保证了各个第一夹具81和第二夹具82每次移动都能停留在预定位置,无需另外设置定位结构,有利于简化结构。
39.更具体的,所述推块组件1133包括固定在传动杆1132上的底座,底座上设有推块,
该推块的后端转动连接在底座上,该推块的前端和底座之间设有弹簧,即弹簧往上顶压推块的前端。因此,传动杆1132往前滑动时,推块前端上翘凸出于底座,推块前端会接触第一夹具81或第二夹具82,就会往前推动第一夹具81或第二夹具82;而传动杆1132往后滑动时,推块的前端压缩弹簧而缩进底座内,第一夹具81或第二夹具82保持原位置不动。因此推块组件1133可以单向向前推动第一夹具81或第二夹具82。当然,第一夹具81和第一传送轨道111之间,或第二夹具82和第二传送轨道112之间应当具有一定的摩擦力。
40.更具体的,如图6、图7所示,所述拧线机构4包括固定台41、设在固定台41上的夹线定位组件42、滑动连接在固定台41上的移动台43、以及用于驱动移动台43左右滑动的位移驱动器44,所述移动台43上设有旋转驱动器45,所述旋转驱动器45输出端设有若干可旋转的拧线组件46,各个所述拧线组件46均包括夹爪气缸461以及设在夹爪气缸461输出端的拧线夹爪462。导联线剥皮之后,里面的线芯需要拧到一起,以便后续插线,本发明利用拧线夹爪462夹住导联线线芯(但不夹死),然后一边旋转一边后退,就可以完成拧线过程。位移驱动器44和旋转驱动器45均优选为伺服电机或步进电机,位移驱动器44和移动台43之间设有滚珠丝杠这类丝杆副进行传动,旋转驱动器45和其中一个拧线组件46之间、相邻两拧线组件46之间均通过同步带同步轮这种传动副进行传动。而且位移驱动器44和旋转驱动器45的动作应当相互配合,以实现一边拧线一边后退,从而将线拧的又紧又长。
41.更具体的,如图8、9所示,所述插线机构5包括用于夹持导联线且能沿上下左右移动的夹线组件51、用于夹持电极头并能翻转电极头的翻转组件52、用于驱动翻转组件52左右方向移动以使得导联线插入竖向状态电极头的平移组件53,且所述翻转组件52翻转的轴心沿前后方向。
42.所述夹线组件51主要用于将各导联线夹持固定住,并进行定位,以便后续插线。进一步的,所述夹线组件51包括能上下左右移动的两轴平移模组,该两轴平移模组的输出端设有若干对夹爪、以及用于驱动各夹爪开合的开合驱动器(优选为气缸)。
43.更具体的,如图9所示,所述平移组件53包括平移驱动器531、以及设在平移驱动器531输出端的平移架532,所述翻转组件52包括转动连接在平移架532上的翻转架521,所述翻转架521连接有翻转驱动器522,所述翻转架521上设有用于夹持第一夹具81的夹具固定装置523、用于压线头的压线组件524、用于热熔的热压组件525。
44.进一步的,所述平移驱动器531优选为伺服电机或步进电机,其输出端和平移架532之间通过丝杆副进行传动连接。翻转驱动器522优选为气缸,其输出端通过连杆和翻转架521连接。夹具固定装置523包括能与第一夹具81配合的插槽,以及固定气缸,该固定气缸输出端伸出压住第一夹具81从而将其固定。压线组件524包括压线气缸,压线气缸输出端设有若干顶压杆,各顶压杆和压线气缸输出端之间还设有缓冲弹簧,顶压杆伸出后能将插入电极头中的导联线线头压弯折,并压紧到电极头上的插孔中,避免有凸出的线头。热压组件525包括热压气缸,热压气缸输出端设有通有电的热压块,热压组件525的作用是将插入电极头中的导联线热压一下,把导联线融进电极头,将其固定在电极头上。
45.本发明中,电极头装夹在第一夹具81中,第一夹具81装夹在翻转架521上。插线过程中,第一步,夹线组件51先将导联线定位好;第二步,翻转驱动器522启动使得翻转架521翻转90度,将电极头调整为竖向状态,电极头上的插孔暴露出来;第三步,平移驱动器531启动,驱动平移架532以及整个翻转组件52往右移动,即逐渐靠近夹线组件51,导联线线头缓
缓插入电极头上的插孔中;第四步,翻转驱动器522启动,翻转架521往回翻转90度,第一夹具81以及电极头变成水平状态,此过程完成了折线;第五步,压线组件524启动,将插入电极头中的导联线线头压弯折,并压紧到电极头上的插孔中;第六步,热压组件525启动将导联线融进电极头中固定好。本发明中,夹线组件51将导联线定位,平移组件53和翻转组件52的相互配合进行插线,插线的准确率高;导联线弯折90度,易脱离,而且压线组件524、热压组件525固定导联线,使得牢固导联线和电极头连接。
46.更具体的,如图10所示,所述焊接机构6包括焊接头61、以及用于驱动焊接头61上下、左右移动的位移装置62,焊接机构6主要用于将导联线线头和电极头上的触点焊接在一起。如图11所示,所述焊接机构6的前方设有用于将焊点压低的热压机构63,所述热压机构63包括设在热压驱动器631,所述热压驱动器631输出端设有能升降的发热组件632。热压机构63主要用于将焊点压低。
47.更具体的,如图5所示,所述第一夹具81上设有用于启闭第一夹具81的夹具盖811、以及用于锁定夹具盖811的第一卡扣812。夹具盖811一侧铰接在第一夹具81上,且二者之间设有扭簧。所述第一卡扣812的一端被往下顶压时就会解锁夹具盖811。所述第二夹具82上设有用于启闭第二夹具82的第二卡扣821,且所述第二卡扣821的一端被往下顶压时就会打开第二夹具82。本发明采用两个夹具分别固定电极头和导联线,以便后续传送、定位、插线、抓取。
48.更具体的,如图2、图3、图12,所述下料机构7包括主输送线11一侧且用于打开第一夹具81的开盖装置71、设在主输送线11前端的下方且用于往上顶出第一夹具81中电极头的顶出装置72、以及设在顶出装置72上方的两轴平移模组73(常见模组,此处不再赘述),且所述两轴平移模组73的输出端能上下前后移动,所述两轴平移模组73的输出端设有取料夹持组件74、以及用于打开第二夹具82的顶压装置75、用于抓取电极头的真空吸附组件76。
49.进一步的,开盖装置71包括开盖气缸、以及设在其输出端的开盖顶压杆,该开盖顶压杆向下伸出能够顶压第一卡扣812的一端,从而将第一卡扣812打开,这样夹具盖811在扭簧作用下自动打开。顶出装置72包括顶出气缸、以及设在顶出气缸输出端的若干顶出杆,第一夹具81上设有若干通孔,顶出杆向上伸出时穿过对应的通孔,并将电极头从第一夹具81中顶出。
50.所述取料夹持组件74包括若干用于夹持第一夹具81处的导联线的第一取料夹爪741、用于驱动各第一取料夹爪741开合的第一取料驱动器742(优选为气缸)、用夹持第二夹具82处的导联线的第二取料夹爪743、用于驱动第二取料夹爪743开合的第二取料驱动器744(优选为气缸)。
51.如图12所示,真空吸附组件76包括沿上下方向滑动连接(通过滑动副连接)在两轴平移模组73输出端的底座761,所述底座761上设有真空吸盘762,底座761和两轴平移模组73输出端之间还设有缓冲弹簧763。真空吸附组件76主要作用如下:不同于第一取料夹爪741、第二取料夹爪743都是抓取导联线的作用,真空吸附组件76是直接抓取电极头,这样就算有不良品(导联线和电极头没有焊接好,只抓导联线的话,电极头可能起不来),真空吸附组件76也可以将电极头直接取走,避免不良品的电极头残留在第一夹具81中,避免影响第一夹具81的后续使用。
52.更具体的,如图2-图4所示,所述第一回流线12包括第一回流输送装置121、用于将
主输送线11前端输出的第一夹具81转移到第一回流输送装置121的第一转移装置122。所述第二回流线13包括第二回流输送装置131、用于将主输送线11前端输出的第二夹具82转移到第二回流输送装置131的第二转移装置132。进一步的,第一回流输送装置121和第二回流输送装置131均为传送带输送机,即包括传送带和驱动电机等。
53.第一转移装置122包括设在第一回流输送装置121和主输送线11之间的第一无杆气缸,该第一无杆气缸输出端设有能与第一传送轨道111对接的第一对接台,第一对接台上设有能与第一夹具81配合的第一滑槽,第一对接台上还设有第一推块和驱动第一推块的第一推动气缸。第一对接台先与第一传送轨道111对齐,第一夹具81从第一传送轨道111进入第一滑槽后,第一无杆气缸驱动第一对接台移动到第一回流输送装置121上方,第一推动气缸启动,第一推块将第一夹具81推到第一回流输送装置121上。
54.同理,第二转移装置132包括设在第二回流输送装置131和主输送线11之间的第二无杆气缸,该第二无杆气缸输出端设有能与第二传送轨道112对接的第二对接台,第二对接台上设有能与第二夹具82配合的第二滑槽,第二对接台上还设有第二推块和驱动第二推块的第二推动气缸。第二对接台先与第二传送轨道112对齐,第二夹具82从第一传送轨道111进入第二滑槽后,第二无杆气缸驱动第二对接台移动到第二回流输送装置131上方,第二推动气缸启动,第二推块将第二夹具82推到第二回流输送装置131上。
55.更具体的,如图13、图14所示,所述电极头上料机构9包括电极头抓取组件91、以及转动连接在机架1上且沿前后方向布置的传动轴92,所述传动轴92的一端连接有上料驱动装置93,所述传动轴92的另一端和电极头抓取组件91之间设有能带动电极头抓取组件91上下左右移动的传动结构94,所述机架1和传动结构94之间设有能够限定电极头抓取组件91沿倒u形路径来回运动的导向结构95。
56.进一步的,电极头抓取组件91优选为真空吸盘结构。上料驱动装置93优选为气缸,上料驱动装置93和传动轴92之间设有齿轮齿条结构。
57.进一步的,所述传动结构94包括沿左右方向滑动连接在所述机架1上的传动滑块941、沿上下方向滑动连接在传动滑块941上的传动导轨942,所述电极头抓取组件91固定在传动导轨942上,因此电极头抓取组件91可以沿上下左右自由滑动。所述传动导轨942上还设有沿前后方向设置的导向轴943。导向轴943上优选设置有滚轮(可以直接使用轴承);所述传动轴92上固定连接有能左右摆动的摆块944,所述摆块944上设有条形的导向孔9441;所述导向轴943配合在导向孔9441中,且所述摆块944摆动时驱动导向轴943移动。所述导向结构95包括设在机架1上的竖向的导向板951,所述导向板951上设有倒u形的导向槽9511,所述导向轴943配合在导向槽9511中并能沿其路径移动。这样,传动轴92转动时,导向轴943就会沿倒u形的导向槽9511移动,从而使得电极头抓取组件91沿倒u形路径移动,这样就可以实现下降-抓电极头-上升-左移-下降-释放电极头-上升-右移复位这一系列上料步骤。本发明只采用了气缸驱动器,然后使用纯机械式的传动结构94、导向结构95,就可以完成上料步骤,上述结构简单、工作可靠、成本低廉。
58.显然,本发明的上述实施例仅仅是为了清楚说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求
的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1