一种变速器轴承压装伺服控制系统
1.本发明属于汽车零部件技术领域,具体涉及一种变速器轴承压装伺服控制系统。
背景技术:
2.现今制造业与汽车工业飞速发展,对汽车零部件装配质量提出越来越高的要求。轴承是汽车变速器中的重要零件,其装配的质量与整车的质量与安全有着密不可分的关系。
3.在变速器轴承压装的过程中,需要将套圈严格定位,轴和轴承之间需要过盈配合,不仅要能把被包容件迅速稳当地压入包容件内,还需要压装设备能够精确监控压装时的位移、速度和压力变化与对应关系,并依据其关系分析与监控轴承的压装质量。
4.目前,国外的压装系统高昂的价格让很多企业望而却步;国内目前的压装设备大多都是采用传统液压或气动的方式,但其控制精度和自动化水平较低。
5.综合以上,急需一种变速器轴承压装伺服控制系统来解决这些问题。
技术实现要素:
6.本发明的目的是针对现有的问题,提供了一种变速器轴承压装伺服控制系统,解决了传统液压、气动方式控制精度和自动化水平较低的问题。
7.本发明是通过以下技术方案实现的:
8.一种变速器轴承压装伺服控制系统,包括工控机、运动控制卡、伺服驱动器、伺服电机、并联式电动缸和限位开关,所述运动控制卡与伺服驱动器和伺服电机连接,用于获取伺服电机轴状态以及控制伺服驱动器的输出;所述运动控制卡将运动状态反馈至上位机,所述上位机解析后得到伺服电机的轴状态参数;所述上位机将控制数据通过运动控制卡发送至伺服驱动器来控制伺服电机的运动;所述限位开关将到位信号反馈给运动控制卡。
9.进一步地,所述伺服电机和滚珠丝杠通过同步带和减速齿轮连接传动。
10.进一步地,所述工控机和运动控制卡的通讯方式为tcp/ip方式。
11.进一步地,所述上位机控制软件安装于工控机中,包括
12.通信模块,用于填写ip地址,通过ip地址与运动控制卡通讯连接;
13.显示模块,用于得到伺服电机轴状态和电动缸运动状态;
14.操作控制模块,用于操作电动缸的运动,包括运动、停止和回零三种方式,运动模式包括连续运动、相对运动和绝对运动;
15.参数设置模块,用于对脉冲当量、运行速度、起始速度、加速度、减速度、s曲线和运动方式的设置。
16.进一步地,所述上位机包括操作系统和winform开发技术,所述通信模块、显示模块、操作控制模块和参数设置模块中的一项或多项基于所述winform开发技术生成。
17.进一步地,所述显示模块还包括数字和曲线显示两种模式,数字显示包括运动状态和当前轴坐标、轴速度、位移显示,曲线显示包括速度时间曲线、位移时间曲线和压力位
移曲线。
18.本发明相比现有技术具有以下优点:
19.本发明的系统能够很好完成轴承压装工作,能够满足高精度的控制要求。与传统的液压和气动的方式相比,伺服压装系统对于控制指令的动态响应速度快且运行时平稳性好,在安装过程中能够避免出现损坏轴承与壳体的情况,对压装质量有着进一步的提升。同时该系统上位机软件的界面友好,易于操作,能够对压力、位移和速度进行实时监控,并且有着较高的稳定性。
附图说明
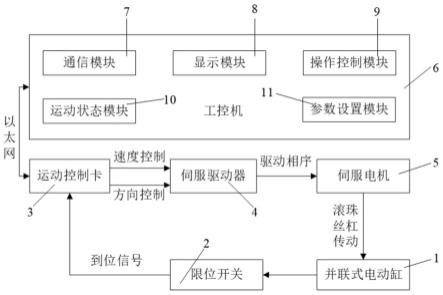
20.图1为本发明的一种变速器轴承压装伺服控制系统结构示意图;
21.图2为本发明提供的控制流程图;
22.图3为本发明提供的运动控制卡电源接线图;
23.图4为本发明提供的运动控制卡与伺服驱动器接线图;
24.图5为本发明提供的输入控制数据和实时显示压装状态的示例图。
具体实施方式
25.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
26.如图1所示,本发明实施例提供一种变速器轴承压装伺服控制系统,包括工控机6、运动控制卡3、伺服驱动器4、伺服电机5、并联式电动缸1和限位开关2。
27.所述工控机6可采用研华工控机ipc,运动控制卡3可采用正运动控制eci_io控制卡,数据吞吐量大,提供完全可编程的运动控制,伺服驱动器4可采用si namics v90伺服驱动器,电源电压为380v,伺服电机5可采用simotics s-1fl6伺服电机,其增量式编码器的分辨率为2500ppr,每转输出的脉冲数为10000,额定功率2kw,最大转矩为28.7nm。
28.所述运动控制卡3与伺服驱动器4和伺服电机5连接,用于获取伺服电机5轴状态以及控制伺服驱动器4的输出;所述运动控制卡3将所述运动状态反馈至工控机6,所述工控机6解析后得到伺服电机5的轴状态参数;所述工控机6将控制数据通过运动控制卡3发送至伺服驱动器4来控制伺服电机5的运动。所述限位开关2将到位信号反馈给运动控制卡3。
29.在本实施例中,工控机6中的通信模块7,通过设置ip地址与运动控制卡3连接,工控机的ip地址与运动控制卡的ip地址需要设置为同一网段,若ip地址第三段不同,应将对应子网掩码设置为0。
30.在本实施例中,所述工控机6包括操作系统和winform开发技术,所述通信模块7、显示模块9、操作控制模块9、运动状态模块10、参数设置模块11中的一项或多项基于所述winform开发技术生成;可选的,操作系统为windows10操作系统;工控机6与运动控制卡3的通讯连接方式为tcp/ip通信。其中通信模块7用于填写ip地址通过以太网与运动控制卡连接,连接成功后并对运动控制卡初始化;显示模块9用于得到伺服电机轴的状态和电动缸运动状态,包括数字和曲线显示两种模式,数字显示包括运动状态和当前轴坐标、轴速度、位
移显示,曲线显示包括速度时间曲线、位移时间曲线和压力位移曲线;参数设置模块11,对脉冲当量、运行速度、起始速度、加速度、减速度、s曲线和运动方式进行设置;所述的运动方式包括持续和点动,方向分为正向和反向;操作控制模块10,分为运动、停止和回零三种方式,包括连续运动、相对距离运动和绝对距离运动,同时获取参数设置模块数据,生成控制命令控制伺服电机。
31.在硬件方面,本发明的实施例涉及运动控制卡电源的接线,如图3所示,本发明的实施例提供的运动控制卡与伺服驱动器接线图,如图4所示,伺服电机采用输入正负向差分脉冲信号驱动,脉冲信号有两个接线端子:pul+和pul-32.。pul+连接脉冲信号正极,pul-连接脉冲信号负极,脉冲信号以pul+和pul-的电压差来衡量。ea+/-、eb+/-和ez+/-为控制卡编码器输入信号,ptoa+/-33.、ptob+/-和ptoz+/-为对应的伺服驱动器差分编码器输出信号,对应的信号线均采用双绞屏蔽线。
34.在本实施例中,伺服电机和滚珠丝杠通过同步带和减速齿轮连接传动。
35.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权力要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1