一种机械抓手装置的制作方法
1.本实用新型涉及工程机械的技术领域,具体涉及到常用于钻机设备的一种机械抓手装置。
背景技术:
2.目前,大部分两指的机械爪是剪叉式结构或者左右直驱的抱夹结构。其中剪叉式结构在纵向布置动力部件,通过连杆驱动两爪开闭,故在纵向占用空间较大;左右动力直驱的抱夹结构在横向布置动力部件,直接驱动两机械爪,故在横向占用空间较大。这种对空间的占用导致在设计机械设备的时候限制较大,如钻机的抓杆机械爪。
3.普通的机械爪受限于本身的结构,不能产生较大的夹持力。且本身结构强度有限,无法承载较重工件,当抓取较粗钻杆钻具时,夹持力偏小就会导致转移钻杆的过程中产生钻杆滑动或脱落的危险。
技术实现要素:
4.针对现有技术所存在的不足,本实用新型目的在于提出一种机械抓手装置,利用驱动缸驱使活动楔块做往返的直线运动,使得抵接在滑动楔块两侧的楔耳配合弹簧进行反复的伸缩,同时,楔耳铰接有机械爪指,最终实现将动力缸的直线运动转变为机械爪指张开与抓紧,具体方案如下:
5.一种机械抓手装置,包括机械爪支架、铰接架、机械爪指,所述机械爪支架内安装动力缸,
6.所述机械爪支架底部固定连接铰接架,所述铰接架铰接所述机械爪指;
7.所述动力缸驱动连接有一个可相对所述机械爪支架滑动的滑动楔块,所述滑动楔块做直线往复运动,所述滑动楔块的一端形成两个对称设置的斜面,所述滑动楔块的两个斜面分别紧密贴合有一个可相对所述机械爪支架滑动的楔耳,所述楔耳铰接机械爪指的尾部,两个所述机械爪指的尾部铰接有复位弹簧。
8.进一步的,所述机械爪支架内固定安装有固定夹,所述固定夹用于固定动力缸。
9.进一步的,所述机械爪支架内的底面上固定安装有圆柱形的导向柱,所述导向柱紧贴滑动楔块的两侧平面。
10.进一步的,所述导向柱顶端设有与所述滑动楔块抵接的限位面,所述限位面的半径大于导向柱的半径。
11.进一步的,所述铰接架与所述机械爪支架垂直设置。
12.进一步的,所述铰接架铆接或焊接在机械爪支架底面。
13.进一步的,所述复位弹簧始终处于收缩趋势。
14.与现有技术相比,本实用新型的有益效果如下:
15.(1)现有的机械抓手受自身结构限制,驱动抓手的动力部件的空间占用大,且普通的机械抓手受限于自身结构及强度,不能产生较大的夹持力,承载重物时容易出现重物滑
动甚至脱落的情况。
16.本实用新型利用楔形结构配合垂直于机械爪支架设置的铰接架上铰接的机械爪指,实现了将动力缸的直线方向的行程和力,转变成机械爪指的张开与抓取;复位弹簧的设置保证机械爪指在抓取过程中能够保证工件的稳定,确保不发生脱落的危险。
17.在本实用新型未工作状态下,两个活动楔块处于最靠近的位置状态,机械爪指扣合,欲张开机械爪指进行抓取工作,利用动力缸驱动活动楔块做往复直线运动;当动力缸推动活动楔块时,带有斜面的活动楔块向两侧推开楔耳,同时,楔耳铰接机械爪指,实现机械爪指的张开;机械爪指同时还铰接有复位弹簧,当动力缸拉动活动楔块退回到未工作状态时,复位弹簧拉动机械爪指,稳定抓取工件,此时两个楔耳位于初始位置或受工件尺寸影响退回至夹紧工件的位置。
18.(2)通过设置固定架将动力缸固定在机械爪支架上,确保动力缸的位置稳定,使得动力缸提供的始终是直线方向上的行程和力。
19.(3)通过设置导向柱,用于限制滑动楔块,使滑动楔块只能沿直线方向往复滑动。
20.(4)通过设置半径大于导向柱的限位面,形成有限制滑动楔块运动范围的抵接面,使滑动楔块在运动过程中紧贴机械爪支架,不会从上部越出。
21.(5)设置垂直于机械爪支架设置铰接架,使得铰接架上铰接的机械爪指垂直机械爪支架的底面,最大限度的适应抓取机械爪支架的底面的下方空间内的工件。
22.(6)将铰接架通过铆接或焊接稳固安装在机械爪支架底面上,使得机械爪指能够适应夹取并承载较重的工件。
23.(7)设置的复位弹簧始终处于收缩趋势,即复位弹簧使两侧的楔耳之间始终存在有相互靠近的拉力,保证机械爪的夹持力稳定,避免在使用过程中出现工件的滑动或掉落的风险。
附图说明
24.图1为本实用新型的机械爪指抓取的状态;
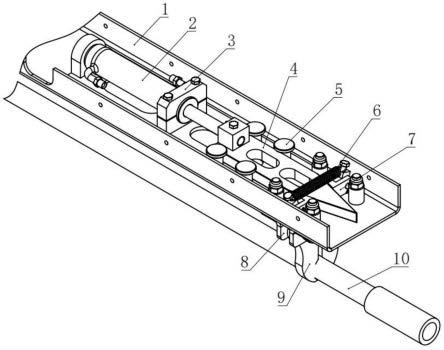
25.图2为本实用新型的处于松开状态的内部结构俯视图;
26.图3为本实用新型的机械爪指松开示意图;
27.图4为本实用新型的处于夹紧状态的内部结构俯视图;
28.图5为本实用新型的机械爪指夹紧过程示意图;
29.图6为本实用新型的机械爪指张开的状态;
30.图7为本实用新型成对使用时的抓取状态。
31.附图标记:1、机械爪支架;2、动力缸;3、固定夹;4滑动楔块; 5、导向柱;6、复位弹簧;7、楔耳;8、铰接架;9、机械爪指;10、工件。
具体实施方式
32.下面结合实施例及附图对本实用新型作进一步的详细说明,但本实用新型的实施方式不仅限于此。
33.现有的机械爪受限于本身的结构,不能产生较大的夹持力。且其本身结构强度有限,无法承载较重的工件,在抓取较粗的钻杆或钻具时,若机械爪的夹持力偏小就会导致转
移钻杆或钻具的过程中产生钻杆或钻具的滑动或脱落,存在安全隐患。本实用新型利用楔形结构的运动特点配合垂直于机械爪支架设置的铰接架上铰接的机械爪指,实现了将动力缸的直线方向的行程和力,转变成机械爪指的张开与抓取;复位弹簧的设置保证机械爪指在抓取过程中能够保证工件的稳定,确保不发生脱落。
34.如图1,一种机械抓手装置,机械爪支架1内固定安装有动力缸 2、固定夹3,动力缸2驱动连接滑动楔块4,其中滑动楔块4贴于机械爪支架1内部的底面,固定夹3用于将动力缸2稳定在水平方向上;机械爪支架1底部垂直连接有固定的铰接架8,铰接架8铆接或焊接在机械爪支架1的底面,铰接架8铰接机械爪指9,机械爪指9用于直接接触工件10,实现对工件10的夹持;
35.紧贴滑动楔块4的两侧有固定在机械爪支架1底部的四个导向柱 5,滑动楔块4的在四个导向柱5的限制下沿直线方向运动,其中,导向柱5的顶端设有与滑动楔块4抵接的限位面,其中,限位面的半径大于导向柱5的半径,用于限制滑动楔块4处在紧贴机械爪支架1 的位置进行滑动,不发生纵向偏移。
36.铰接架8连接铰接有两个机械爪指9,称每个机械爪指9远离夹持工件10的一端为尾端,每个机械爪指9的尾端铰接一个楔耳7,两个机械爪指9的尾端还同时铰接一根复位弹簧6,两个楔耳7设置在同一直线上。
37.如图2、图4,滑动楔块4的斜面与楔耳7的斜面契合,图2展示的是机械爪指9处于抓取状态,图4展示的是机械爪指9处于张开状态,复位弹簧6配合滑动楔块4实现两个楔耳7处于抓取状态时,复位弹簧6仍然处在伸长状态,即复位弹簧6此时仍具有一定的收紧的力,防止楔耳7因为震动或其他因素导致翻转而使机构失效。
38.本实用新型使用特殊的驱动结构,能在较小的纵向布置和横向布置下驱动机械爪指9开合,整体结构扁平,方便布置;通过应用楔形机构,使得本实用新型的抓手夹持力相较于传统的两指机械爪有较大提升。
39.使用过程中,本实用新型有夹紧和松夹两个过程,
40.夹紧过程:图5展示了机械爪指9夹紧工件10的过程。装置位于夹紧状态时,滑动楔块4推开两侧的楔耳7。
41.在夹紧过程中,装置从图2的状态转变成图4的状态,动力缸2 的活塞伸出,推动滑动楔块4,滑动楔块4在导向柱5的限制下向前直线滑动,滑动楔块4推动紧贴斜面的两个楔耳7,使之向两边分开,每个楔耳7铰接一个机械爪指9的尾部,被滑动楔块4推开相互远离的两个楔耳7带动与之铰接的两个机械爪指9,机械爪指9绕与铰接架8的铰接点进行旋转,两个机械爪指9的尖端由于杠杆作用向内收,产生夹的动作,从而实现对工件10的夹紧,图中展示工件10、机械爪指9的形状的仅为示意图,具体的形状本实用新型不做限制。
42.在松夹过程中,装置从图4的状态转变成图2的状态:动力缸2 活塞缩回,拉动滑动楔块4在导向柱5的限制下向后直线回缩,复位弹簧6始终拉紧机械爪指9的尾端,复位弹簧6拉动楔耳7相互靠近,使得复位弹簧6的斜面始终贴紧滑动楔块4的斜面,滑动楔块4回缩时,楔耳7和机械爪指9的尾端向内靠拢,两机械爪指9绕与铰接架 8铰接点转动,两机械爪指9尖端由于杠杆作用向两侧分开,产生松夹动作,完成对工件10的松夹。
43.本说明书附加有图6用于展示初始机械手处于张开状态时的样示;以钻机为例,图7用于展示成对机械爪手的连接方式及夹紧时的状态,可以对称布置机械爪手;根据受力分
析,适当改动机械爪指9 的铰接位置,适当调整楔形块的楔形角度,可以使该机械爪手的夹持力远大于动力缸2的推力,相较于传统两指机械爪在夹持力上有较大提升,本技术书所有附图中展示的工件10、机械爪指9的形状的仅为示意图,具体的形状本实用新型不做限制。
44.以上所述仅是本实用新型的优选实施方式,本实用新型的保护范围并不仅局限于上述实施例,凡属于本实用新型思路下的技术方案均属于本实用新型的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理前提下的若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1