蜂球组装机的制作方法
1.本实用新型属于蜂球生产领域,具体涉及一种蜂球组装机。
背景技术:
2.赤眼蜂释放球,简称蜂球,如图6~图10所示,由下半球、蜂卡、内盖及上半球组成,是用于水稻、甘蔗等害虫生物防治的新产品。随着生物防治技术的推广,蜂球产品已经获得大规模的应用。应用期间,一天数以十万计的蜂球产品的生产,急需可靠、高效的组装生产设备支持。
技术实现要素:
3.本实用新型的目的是解决上述技术问题,提供一种结构紧凑、能有效提高蜂球的组装生产效率的蜂球组装机。
4.为实现上述的目的,本实用新型的技术方案为:
5.一种蜂球组装机,包括底座和安装在底座上的旋转平台,所述旋转平台的台面上均匀设置四组用于放置蜂球的下半球的安装槽,所述旋转平台的四周均匀依次设置四组分别用于安装蜂球的下半球、蜂卡、内盖及上半球的装配机构,所述装配机构与安装槽一一相对;所述旋转平台的上方设有3个调平板,3个所述调平板分别设在下半球装配机构与蜂卡装配机构、蜂卡装配机构与内盖装配机构以及内盖装配机构与上半球装配机构之间;所述调平板固定在所述底座上。
6.作为进一步的技术方案,以上所述下半球装配机构包括支架a1和用于输送下半球的进球通道,所述支架a1上设置有组件a2及水平移动气缸a3,所述组件a2包括垂直移动气缸a4和用于抓取下半球的三爪气缸机械手a5;任一组所述安装槽与进球通道相对,所述进球通道设于三爪气缸机械手a5的下方,所述三爪气缸机械手a5安装在垂直移动气缸a4的下端,与垂直移动气缸a4同步上下移动;所述垂直移动气缸a4安装在水平移动气缸a3上,与水平移动气缸a3同步水平移动;所述水平移动气缸a3在相对的进球通道与安装槽的上方水平移动。
7.作为进一步的技术方案,以上所述蜂卡装配机构设有支架b1和用于输送蜂卡的进料通道b6,所述支架b1上设置有组件b2及水平移动气缸b3,所述组件b2包括垂直移动气缸b4和用于抓取蜂卡的针型气缸机械手b5;任一组所述安装槽与进料通道b6相对,所述进料通道b6设于针型气缸机械手b5的下方,所述针型气缸机械手b5安装在垂直移动气缸b4的下端,与垂直移动气缸b4同步上下移动;所述垂直移动气缸b4安装在水平移动气缸b3上,与水平移动气缸b3同步水平移动;所述水平移动气缸b3在相对的进料通道b6与安装槽的上方水平移动。
8.作为进一步的技术方案,以上所述内盖装配机构设有支架c1和用于输送内盖的进料通道c6,所述支架c1上设置有组件c2及水平移动气缸c3,所述组件c2包括垂直移动气缸c4和用于抓取内盖的三爪气缸机械手c5,任一组所述安装槽与进料通道c6相对,所述进料
通道c6设于三爪气缸机械手c5的下方,所述三爪气缸机械手c5安装在垂直移动气缸c4的下端,与垂直移动气缸c4同步上下移动;所述垂直移动气缸c4安装在水平移动气缸c3上,与水平移动气缸c3同步水平移动;所述水平移动气缸c3在相对的进料通道c6与安装槽的上方水平移动。
9.作为进一步的技术方案,以上所述上半球装配机构设有支架d1和用于输送上半球的进料通道d6,支架d1上设置有组件d2及水平移动气缸d3,所述组件d2包括垂直移动气缸d4和用于抓取上半球的真空吸盘机械手d5,任一组所述安装槽与进料通道d6相对,所述进料通道d6设于真空吸盘机械手d5的下方,所述真空吸盘机械手d5安装在垂直移动气缸d4的下端,与垂直移动气缸d4同步上下移动;所述垂直移动气缸d4安装在水平移动气缸d3上,与水平移动气缸d3同步水平移动;所述水平移动气缸d3在相对的进料通道d6与安装槽的上方水平移动。
10.作为进一步的技术方案,以上所述上半球装配机构还包括带有移动接料盘的出球通道,所述出球通道平行设置在进料通道d6旁。
11.作为进一步的技术方案,以上所述调平板的底面由斜面圆滑过渡到平面;所述平面与所述旋转平台的上表面平行;所述斜面与所述旋转平台的旋转方向相对,使得所述安装槽转动时依次先后经过所述斜面及所述平面。
12.与现有技术相比,本实用新型的有益效果为:本实用新型根据蜂球的工件组成顺序设计了下半球、蜂卡、内盖及上半球的装配机构,并将装配机构均匀设置在旋转平台四周,结构紧凑,通过采用调平板,对前面一道装配工序后的蜂球工件姿态进行自动调平,确保后续组装工序的有效完成,有效提高大量蜂球产品的组装生产效率,本实用新型的蜂球组装机每小时可以组装蜂球产品1200-1800个以上。
附图说明
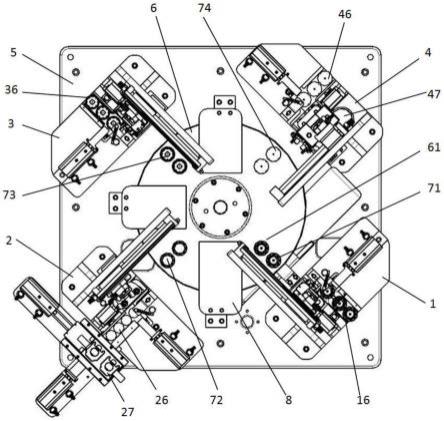
13.图1为本实用新型蜂球组装机的结构示意图;
14.图2为本实用新型蜂球组装机的下半球装配机构的结构示意图;
15.图3为本实用新型蜂球组装机的蜂卡装配机构的结构示意图
16.图4为本实用新型蜂球组装机的内盖装配机构的结构示意图;
17.图5为本实用新型蜂球组装机的上半球装配机构的结构示意图;
18.图6为蜂球的下半球的结构示意图;
19.图7为蜂球的蜂卡的结构示意图;
20.图8为蜂球的内盖的结构示意图;
21.图9为蜂球的上半球的结构示意图;
22.图10为蜂球组装完成后的产品外观示意图。
23.附图标记:
24.1-下半球装配机构,11-支架a1,12-组件a2,13-水平移动气缸a3,14-垂直移动气缸a4,15-三爪气缸机械手a5,16-进球通道;
25.2-蜂卡装配机构,21-支架b1,22-组件b2,23-水平移动气缸b3,24-垂直移动气缸b4,25-针型气缸机械手b5,26-进料通道b6;
26.3-内盖装配机构,31-支架c1,32-组件c2,33-水平移动气缸c3,34-垂直移动气缸
c4,35-三爪气缸机械手c5,36-进料通道c6;
27.4-上半球装配机构,41-支架d1,42-组件d2,43-水平移动气缸d3,44-垂直移动气缸d4,45-真空吸盘机械手d5,46-进料通道d6,47-出球通道;
28.5-底座;
29.6-旋转平台,61-安装槽;
30.7-蜂球,71-下半球,72-蜂卡,73-内盖,74-上半球;
31.8-调平板,81-斜面,82-平面。
具体实施方式
32.下面结合实施例对本实用新型作进一步详细的描述,但本实用新型的实施方式并不局限于实施例表示的范围。
33.实施例1:
34.本实用新型要装配的蜂球7如图6-图10所示,由下半球71、蜂卡72、内盖73及上半球74组成。
35.如图1所示,本实施例的蜂球组装机,包括底座5和安装在底座上的旋转平台6,旋转平台6的台面上均匀设置四组用于放置蜂球7的下半球71的安装槽61,每组安装槽61设为2个内外排布的凹槽,使得装配机构可以一次同时安装两个同类蜂球7工件,凹槽的形状与下半球71球面相匹配;旋转平台6的四周均匀依次设置四组分别用于安装蜂球7的下半球71、蜂卡72、内盖73及上半球74的装配机构,装配机构与安装槽61一一相对。
36.由于安装槽61是与下半球71相配合的半球形,下半球71在放入安装槽61内时,容易因其对位偏差导致倾斜,影响下一装配机构安装蜂卡72,所以必须在下半球71转到蜂卡装配机构前将其调平,调平板61由此而设;同理,在安装蜂卡72和内盖73时,也同样会使下半球71产生倾斜,所以在安装槽61有蜂球工件旋转到下一组装配机构过程中,都设有调平板8。调平板8将安装槽61中的下半球71的开口姿态调整到水平状态,以便利于开展下一步安装。旋转平台的上方设有3个调平板8,3个调平板8分别设在下半球装配机构1与蜂卡装配机构2、蜂卡装配机构2与内盖装配机构3以及内盖装配机构3与上半球装配机构4之间;调平板8固定在底座5上。调平板8的底面由斜面81圆滑过渡到平面82;平面82与旋转平台6的上表面平行;斜面81与旋转平台6的旋转方向相对,使得安装槽61转动时依次先后经过斜面81及平面82。本实施例的调平板8是一块金属板,当倾斜的下半球71进入调平板8底面时,因为球面的部件在安装槽61很容易转动,蜂球7工件在调平板8的约束下其开口面会转平。
37.如图2所示,下半球装配机构1包括支架a1 11和用于输送下半球71的进球通道16,通过进球通道16送进需要组装的下半球71工件;支架a1 11上设置有组件a2 12及水平移动气缸a3 13,组件a2 12包括垂直移动气缸a4 14和两个用于抓取下半球71的三爪气缸机械手a5 15,以同时抓取两个下半球71;任一组安装槽61与进球通道16相对,进球通道16设于三爪气缸机械手a5 15的下方,三爪气缸机械手a5 15安装在垂直移动气缸a4 14的下端,与垂直移动气缸a4 14同步上下移动;垂直移动气缸a4 14安装在水平移动气缸a3 13上,与水平移动气缸a3 13同步水平移动;水平移动气缸a3 13在相对的进球通道16与安装槽61的上方水平移动;三爪气缸机械手a5 15通过垂直移动气缸a4 14的垂直移动以及水平移动气缸a3 13的水平移动,可将两个下半球71放置到旋转平台6的两个安装槽61中。
38.进料通道16端头都设置有光电传感器,当工件移动到位触发传感器时,推料气缸将该工件推至上料盘,此盘上有两个与工件相配合的凹槽,第一个工件进入凹槽后,上料盘前移到位,再将第二个工件推进凹槽,而两个凹槽的间距与旋转平台 6上的安装槽61间距完全一样,同时带动上料盘的气缸,其移动行程也与上述间距相等。下半球装配机构1可以将上料盘中的两个下半球71放置到旋转平台6的两个安装槽61中。
39.如图3所示,蜂卡装配机构2设有支架b1 21和用于输送蜂卡72的进料通道b6 26,通过进料通道b6 26送进需要组装的蜂卡72工件;支架b1 21上设置有组件b2 22及水平移动气缸b3 23,组件b2 22包括垂直移动气缸b4 24和两个用于抓取蜂卡72的针型气缸机械手b5 25,可以通过针刺蜂卡72同时提起两个蜂卡72;任一组安装槽61与进料通道b6 26相对,进料通道b6 26设于针型气缸机械手b5 25的下方,针型气缸机械手b5 25安装在垂直移动气缸b4 24的下端,与垂直移动气缸b4 24同步上下移动;垂直移动气缸b4 24安装在水平移动气缸b3 23上,与水平移动气缸b3 23同步水平移动;水平移动气缸b3 23在相对的进料通道b6 26与安装槽61的上方水平移动。针型气缸机械手b5 25通过垂直移动气缸b4 24的垂直移动以及水平移动气缸b3 23的水平移动,将两个蜂卡72放置到旋转平台6的两个安装槽61内的下半球71中。
40.本实施例的蜂卡72是表面粘有虫卵的薄纸板,蜂卡72装在蜂卡储料管27,通过常规的蜂卡送料机构将其逐渐送入进料通道b6 26。进而,蜂卡装配机构2将两个蜂卡72放置到旋转平台6的两个安装槽61内的下半球71中。
41.如图4所示,内盖装配机构3设有支架c1 31和用于输送内盖73的进料通道c6 36,通过进料通道c6 26送进需要组装的内盖73工件;支架c1 31上设置有组件c2 32及水平移动气缸c3 33,组件c2 32包括垂直移动气缸c4 34和两个用于抓取内盖73的三爪气缸机械手c5 35,可以同时抓取两个内盖73;任一组安装槽61与进料通道c6 36相对,进料通道c6 36设于三爪气缸机械手c5 35的下方,三爪气缸机械手c5 35安装在垂直移动气缸c4 34的下端,与垂直移动气缸c4 34同步上下移动;垂直移动气缸c4 34安装在水平移动气缸c3 33上,与水平移动气缸c3 33同步水平移动;水平移动气缸c3 33在相对的进料通道c6 36与安装槽61的上方水平移动。三爪气缸机械手c5 35通过垂直移动气缸c4 34的垂直移动及水平移动气缸c3 33的水平移动,将由进料通道c6 36送来的两个内盖73放置到旋转平台6的两个安装槽61内的下半球71中的蜂卡72上方。
42.如图5所示,上半球装配机构4设有支架d1 41和用于输送上半球74的进料通道d6 46,通过进料通道d6 46送进需要组装的上半球74工件;支架d1 41上设置有组件d2 42及水平移动气缸d3 43,组件d2 42包括垂直移动气缸d4 44和两个用于抓取上半球74的真空吸盘机械手d5 45,可以同时吸取两个上半球74;任一组安装槽61与进料通道d6 46相对,进料通道d6 46设于真空吸盘机械手d5 45的下方,真空吸盘机械手d5 45安装在垂直移动气缸d4 44的下端,与垂直移动气缸d4 44同步上下移动;垂直移动气缸d4 44安装在水平移动气缸d3 43上,与水平移动气缸d3 43同步水平移动;水平移动气缸d3 43在相对的进料通道d6 46与安装槽61的上方水平移动。上半球装配机构4还包括带有移动接料盘的出球通道47,出球通道47平行设置在进料通道d6 46旁,可将组装好的蜂球7产品向外输出。真空吸盘机械手d5 45通过垂直移动气缸d4 44的垂直移动及水平移动气缸d3 43的水平移动,将由进料通道d6 46送来的两个上半球74移动到旋转平台6的两个下半球71上方后,再通过下压使上
半球74与下半球71套接扣紧,从而完成蜂球7的产品组装。
43.在本实用新型的描述中,需要理解的是,术语
“ꢀ
中心”、
“ꢀ
纵向”、
“ꢀ
横向”、
“ꢀ
前”、
“ꢀ
后”、
ꢀ“ꢀ
左”、
“ꢀ
右”、“首”、“尾”、
“ꢀ
竖直”、
“ꢀ
水平”、
“ꢀ
顶”、
“ꢀ
底
”“ꢀ
内”、
“ꢀ
外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或 暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型保护范围的限制。还需要说明的是,除非另有明确的规定和限定,“相连”、“连接”等术语应做广义理解,例如,可以是固定连接;可以是拆卸连接;也可以是点连接;可以是直接连接;可以是通过中间媒介间接连接,可以使两个元件内部的连通,对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。本实用新型中未详尽说明的设备连接方式,均按本领域的常规连接方式理解。
44.上述实施例,仅为对本实用新型的目的、技术方案和有益效果进一步详细说明的具体个例,本实用新型并非限定于此。凡在本实用新型公开的范围之内所做的任何修改、等同替换、改进等,均包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1