一种数控电火花成形机床的动梁式龙门结构的制作方法
1.本实用新型涉及数控电火花成形机床技术领域,尤其提供一种数控电火花成形机床的动梁式龙门结构。
背景技术:
2.现有技术中,电火花成形机床的主要用途是对各类模具、精密零部件的复杂型腔和曲面形体的加工,加工对象多是规格较小的零部件。随着科学技术的迅速发展,需要使用电火花成形机床加工的零部件逐渐大型化,例如航空航天和汽车能源领域中的大型零部件,越来越多地需要使用电火花成形机床提供高精度的加工。为此,就需要增大机床的三维方向上的加工行程。如果将现有电火花成形机床的机床结构进行简单的放大,其中已有的机床结构难以满足越来越高的运动精度与速度要求。因此,现有电火花成形机床,对航空、航天、汽车、能源等领域的大型零部件的高精度、高稳定性的加工成为一个痛点。
技术实现要素:
3.本实用新型的目的在于改进现有技术的不足,提供一种数控电火花成形机床的动梁式龙门结构,克服偏载缺陷,提升机床的运动精度。
4.本实用新型进一步的目的在于提供构成稳定的可以在机床三维大行程下,获得直线轴定位精度和重复定位精度的提升,从而满足大型高精度零部件的加工需求的动梁式龙门结构。
5.本实用新型的目的是这样实现的:
6.本实用新型提供的数控电火花成形机床的动梁式龙门结构,包括床身、龙门横梁、滑鞍和滑枕,所述龙门横梁的两端置于所述床身上构成龙门结构,
7.所述龙门横梁与所述床身、所述滑鞍与所述龙门横梁以及所述滑鞍与所述滑枕,两两构成相对移动的两个部件:相对固定部件和相对移动部件构成的组件,各个组件中的所述相对固定部件和所述相对移动部件之间均通过导轨丝杠系统连接,各个所述导轨丝杠系统中,相对固定部件和相对移动部件,其中之一上设置导轨,另一上设置嵌合连接的导槽,所述丝杠连接驱动电机,在所述滑枕上设置加工头接口;
8.还包括能够控制各个组件中的相对移动部件在相对固定部件上定位和重复定位的控制装置。
9.优选地,所述丝杠可转动地设置在设有所述导轨的部件上。
10.具体地,各个组件中的导轨丝杠系统的结构可以是:
11.所述龙门横梁与所述床身之间的所述导轨丝杠系统为:所述床身具有两个平行的上端面,其上均设置有y向导轨和y向丝杠,并分别设有一个y向驱动电机与所述y向丝杠连接,由此构成双y向驱动电机模式;所述龙门横梁两端设有y向导槽与所述床身两个上端面上y向导轨嵌合连接,还设有螺母与两个所述y向丝杠连接。
12.所述滑鞍与所述龙门横梁的所述导轨丝杠系统为:在所述龙门横梁上设有x向导
轨、x向丝杠和x向驱动电机,所述x向驱动电机与所述x向丝杠连接,所述滑鞍上设有x向导槽与所述龙门横梁上的所述x向导轨嵌合连接,还设有螺母与所述龙门横梁上的所述x向丝杠连接。
13.所述滑鞍与所述滑枕的所述导轨丝杠系统为:所述滑鞍上设有竖向设置的z向导槽和螺母,所述滑枕上设有z向导轨与所述滑鞍上的所述z向导槽嵌合连接,还设有z向丝杠与所述滑鞍上的螺母连接,在所述滑枕上设有z向驱动电机,与所述z向丝杠连接。
14.优选地,所述床身包括底板和两个立板,两个所述立板相互平行地一体成型在所述底板相对的两侧边缘上,形成断面为u形的一体化床身,在两个所述立板上构成所述的两个平行的上端面。
15.优选地,在所述床身的每个上端面上相互平行地设置两根y向导轨,所述y向丝杠设置在两根y向轨道之间。由此构成龙门横梁与床身的双驱y轴四根导轨和两根丝杠构成的导轨丝杠系统的结构。
16.优选地,所述床身的底板和两个立板为铸造一体成型件。具体地,所述床身为铸造壳体,壳体中设置筋隔,该壳体的壁厚优选为15-20mm。
17.优选地,所述龙门横梁、滑鞍和滑枕也可以为壳体构造,壳体中设置筋隔,该壳体的壁厚可以是15-20mm。
18.进一步地,所述龙门横梁的两端底部分别设有一向前的凸部,使得所述龙门横梁两个端部的横截面为l形,在该龙门横梁两端的底部设置的所述y向导槽延伸到所述凸部的下底面。
19.优选地,所述龙门横梁两端底部的所述y向导槽是间断的。更优选地,该y向导槽分布在所述龙门横梁底部y方向的两端和中部。
20.在所述龙门横梁上每个上端面上的y向导槽相对于其间的y向丝杠左右对称分布。
21.所述龙门横梁上两端的所述y向丝杠相对于工作台y向中心线左右对称分布。
22.优选地,所述龙门横梁上的所述x向导轨为两条,分别为上导轨和下导轨,所述上导轨设置在所述龙门横梁的上端面上,所述下导轨设置在所述龙门横梁前面的侧壁上,所述x向丝杠设置在两条导轨之间且位于该侧壁上。
23.进一步地,所述龙门横梁前面的侧壁从上向下顺序为上竖直平面、向前凸起的龙门横梁斜面和下竖直平面,所述下轨道设置在所述下竖直平面上,在所述上竖直平面上设置一凹槽,所述x向丝杠设置在该凹槽中,所述滑鞍上设置两条导槽与所述龙门横梁上的两条导轨相对应,设置螺母与所述x向丝杠相配合,在所述滑鞍上设置一滑鞍斜面与所述龙门横梁斜面匹配贴合。
24.优选地,所述滑鞍的朝向所述龙门横梁的后侧板,其上端向后凸设一平台,在该平台的下底面上设置上导槽与所述龙门横梁上端面上的上导轨嵌合连接,所述滑鞍的所述后侧板的后侧面的下部设置下导槽与所述龙门横梁上的下导轨嵌合连接。
25.在所述滑鞍的后侧板的前侧面的两侧边缘分别向前平行地凸设两个竖板,在两个竖板相对的侧面上分别设置两道所述z向导槽,所述滑枕置于所述滑鞍由所述后侧板和两个所述竖板构成的u型截面半包围的竖向空间中,所述滑枕的后侧面上设置所述z向丝杠与所述滑鞍上的螺母连接,所述滑枕的左右两个侧面上分别设置两个导轨,与所述滑鞍上两个所述竖板相对侧面上分别设置的两道所述z向导槽嵌合连接。
26.进一步地,在所述滑枕和所述滑鞍之间还可以设置配重平衡气缸。
27.具体地,在所述滑鞍的两个竖板的上端面上固定配重平衡气缸的缸体,在所述滑枕的上端面上固设一横杆,在该横杆的两端分别设置一活塞杆,两个活塞杆上设置活塞分别插设在两个缸体中,在缸体位于所述活塞两侧的缸壁上设置进出口连接液压系统或气压系统,以实现当z向驱动电机通过z向丝杠带动滑枕向上移动时,两个配重平衡气缸使得活塞向上移动,当z向驱动电机带动滑枕向下移动时,两个配重平衡气缸产生在设定压力下阻止活塞向下移动的作用。
28.优选地,在所述龙门横梁与所述床身的组件中,所述导轨丝杠系统中的丝杠的螺距选为6mm。
29.优选地,在所述滑鞍与所述龙门横梁组件中的所述导轨丝杠系统中的丝杠的螺距选为6mm。
30.优选地,在所述滑鞍与所述滑枕组件中的所述导轨丝杠系统中的丝杠的螺距选为6mm。
31.优选地,所述龙门横梁与所述床身之间的所述导轨丝杠系统中的丝杠为d5006丝杠。优选地,在所述滑鞍与所述龙门横梁之间的所述导轨丝杠系统中的丝杠为d5006丝杠。
32.优选地,在所述滑鞍与所述滑枕之间的所述导轨丝杠系统中的丝杠为d5006丝杠。
33.优选地,所述控制装置为光栅尺控制装置,其包括电机驱动器和光栅尺,所述光栅尺包括光栅定尺和光栅动尺或称为读数头,在所述电机驱动器上设有光栅尺位置接口,各个所述组件中,所述y向光栅定尺固定在所述床身上与所述y向导轨相邻,所述x向光栅定尺固定在所述龙门横梁上与所述x向导轨相邻,所述z向光栅定尺固定在所述滑枕上与所述z向导轨相邻,所述读数头设置在各个所述组件中的相对移动部件上,使得所述光栅尺和所述电机驱动器闭环控制所述驱动电机。
34.优选地,所述光栅尺的分辨率为2-5微米。
35.优选地,其他各个组件中的光栅尺的分辨率可以均为3微米。
36.通过所述控制装置,即可实现滑枕上固定的加工头通过各向驱动电机在光栅尺位置反馈到电机驱动器的闭环控制下在三维方向上的运动、定位和重复定位。
37.在所述加工头接口上可以连接各种加工头,例如电加工主轴和高精度的c轴等,实现电加工主轴的按需求替换的要求。
38.本实用新型提供的数控电火花成形机床的动梁式龙门结构具有如下优点:
39.1.龙门结构改变了现有技术中的牛头式主轴的偏载缺陷,提升了机床y轴和z轴的运动精度。
40.2.所述龙门横梁与床身之间通过双y向驱动电机的驱动,增加了龙门横梁受力和运动的平稳性,提高了加工精度。
41.3.床身中的底板和立板一体化铸造,结构紧凑,一次加工精度高,提高了整机装配效率,也提高了整机的精度和刚性。
42.4.龙门横梁上的上下导轨的垂直布置,提高了滑鞍和滑枕的精度和稳定性,可以更好地承载结构的倾覆力。
43.5.滑鞍和滑枕之间四根导轨的导轨丝杠系统的结构以及半包围的布置,提高了z向滑枕的运动精度和稳定性。
44.6.在滑鞍和滑枕之间设置配重平衡气缸,可以提高电加工主轴等在竖直方向上下移动的稳定性。
45.7.通过在控制装置中设置高分辨率的光栅尺和导轨丝杠系统中选用高精度的丝杠,或者选用小螺距的丝杠,可以实现直线轴定位精度和重复定位精度的提升,从而满足大型高精度零部件的加工需求。
46.基于上述优点,本实用新型提供的包括动梁式龙门结构的数控电火花成形机床,解决了电火花成形机床对大型零部件的加工难题,例如机床x/y/z轴行程≥2500mm
×
1500mm
×
1000mm,其结构设计可以使得其精度达到直线轴定位精度/重复定位精度≤0.008mm/0.005mm,成为精密的电火花加工机床,可以广泛应用在航空、航天、汽车、能源等高精度大型零部件的加工领域中。
47.下面通过附图和实施例对本实用新型作进一步说明。
附图说明
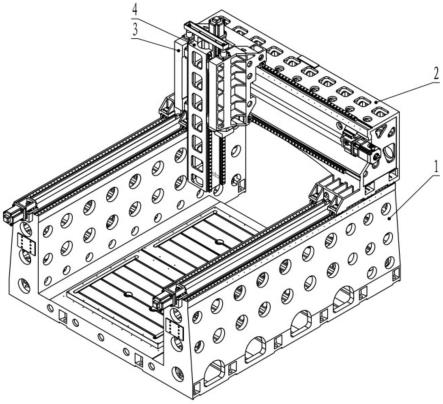
48.图1为本实用新型提供的数控电火花成形机床的动梁式龙门结构的立体结构示意图。
49.图2为图1所示结构中床身的立体结构示意图。
50.图3为图1所示结构中龙门横梁的立体结构示意图。
51.图4为图1所示结构中滑鞍和滑枕组合件前视角度下的立体结构示意图。
52.图5为图4所述组合件后视角度下的立体结构示意图。
53.图6为图4所示组合件主视结构示意图。
54.图7为图6的a-a剖视结构示意图。
具体实施方式
55.如图1所示,数控电火花成形机床的动梁式龙门结构包括床身1、龙门横梁2、滑鞍3和滑枕4。
56.再结合图2所示,床身1包括底板101和两个立板102,两个立板102相互平行地通过一体铸造一体成型在底板101相对的两侧边缘上,形成断面为u形的一体化床身,床身为铸造壳体,壳体中具有筋隔。两个立板102之间形成工作台。在两个立板102上分别设置有y向导轨和y向丝杠,并分别设有一个y向驱动电机与所述y向丝杠连接。如图2所示,在床身1的每个立板12的上端面上相互平行地设置两根y向导轨,即在左侧的立板上设置有y向导轨11和y向导轨13,在右侧的立板上设置有y向导轨16和y向导轨17。在左侧立板上两个导轨之间设置y向丝杠14,立板上固定y向驱动电机12与y向丝杠14连接,在右侧立板上两个导轨之间设置y向丝杠18,与固定在立板102上的y向驱动电机20连接。y向驱动电机12和20均通过电机座15固定在各自所在立板102的前端面上端,y向丝杠18和14均通过轴承21支撑固定在立板102上。在两个立板102的上端面上设置光栅固定尺19和光栅固定尺22,相匹配的光栅读数头设置在龙门横梁2上。
57.再结合图3所示,龙门横梁2的主体梁身的两端,分别设有y向导槽与床身1的两个立板102上的y向导轨嵌合连接,龙门横梁2的两端的底部分别设有一向前的凸部201,使得龙门横梁2两个端部的横截面为l形,在该龙门横梁2的每一端的底部设置的两道y向导槽延
伸到凸部201的下底面。龙门横梁2两端底部的y向导槽是间断的,y向导槽包括分布在龙门横梁2底部y方向的两端y向导槽202和中部y向导槽203,与机身1上的y向导轨11、13、16、17嵌合连接,嵌合连接的结合面处进行高精度加工,导槽间断的结构,降低了加工成本,节省了零件机加工时间。在龙门横梁2的每一端下底面上两个y向导槽之间设有螺母204与立板102上的y向丝杠14和18连接,由此,通过两个y向驱动电机的同步动作即可使得龙门横梁2在床身1上沿y向移动。构成龙门横梁2与床身1的双驱y轴四根导轨和两根丝杠驱动的结构。
[0058] 在龙门横梁2上还设有x向导轨、x向丝杠28和x向驱动电机29, x向驱动电机29与x向丝杠28连接;龙门横梁2上的x向导轨为包括上导轨27和下导轨26两条,上导轨27设置在龙门横梁2的上端面上,下导轨26设置在龙门横梁2前面的侧壁上, x向丝杠28设置在两条导轨之间且位于该侧壁上。
[0059]
龙门横梁2与连接电加工主轴的滑枕4通过滑鞍3连接在一起,滑鞍3在龙门横梁2上沿x向移动,具体的结合结构为:龙门横梁2前面的侧壁从上向下顺序为上竖直平面205a、向前凸起的龙门横梁斜面205b和下竖直平面205c,上轨道27设置在龙门横梁2的上端面上,下轨道26设置在下竖直平面205c上,在上竖直平面205a上设置一凹槽205a1,x向丝杠28设置在该凹槽205a1中。参看图1和图4至图7,滑鞍3上设置两条导槽301和302与龙门横梁2上的两条导轨即上导轨27和下导轨26相对应嵌合连接,在两条导槽之间设置螺母303与龙门横梁2上的x向丝杠28相配合连接,在滑鞍3上设置一滑鞍斜面304与龙门横梁斜面205b匹配但不贴合。x向丝杠28通过设置在竖直平面205c上的凹槽205a1中的轴承座32支撑固定在龙门横梁2上,x向驱动电机29通过设置在凹槽205a1右端的电机座33固定。光栅固定尺34设置在竖直平面205a上与导轨27垂直邻接,相匹配的光栅读数头设置在滑鞍3上。
[0060]
在上述结构中,龙门横梁2上的上导轨26和下导轨27垂直布置,提高了滑鞍3和连接在滑鞍3上的滑枕4的运动精度和稳定性,同时可以更好的承载结构的倾覆力。另外,在龙门横梁2上有一龙门横梁斜面205b,更加提高了龙门横梁的抗倾覆能力。
[0061]
滑枕4上设有z向导轨与滑鞍3上的z向导槽嵌合连接,还设有z向丝杠与滑鞍4上的螺母连接,在滑枕4上还设有z向驱动电机40,与z向丝杠47连接;滑枕4上还设有连接结构,用于连接电火花加工装置。
[0062]
如图4至图7所示,滑鞍3的朝向龙门横梁2的后侧板300,其上端向后凸设一平台300a,在该平台300a的下底面上设置上导槽301与龙门横梁2上端面上的上导轨27嵌合连接,滑鞍3的后侧板300的后侧面的下部设置下导槽302与龙门横梁2上的下导轨26嵌合连接;在滑鞍3的后侧板300的前侧面的两侧边缘分别向前平行地凸设两个竖板305,在两个竖板305相对的侧面上分别设置两道z向导槽。滑枕4为横截面为矩形的柱状壳体,置于滑鞍3由后侧板300和两个竖板305构成的u型截面半包围的竖向空间中,滑枕4的后侧面上设置z向丝杠47与滑鞍3上的螺母连接,z向丝杠47通过设置在滑枕4的后侧面上的轴承座48支撑固定。在滑鞍3的上表面上固定电机座49,z向驱动电机40固定在电机座49上,通过联轴节53与z向丝杠47连接,丝杠47通过设置在滑鞍3上的轴承座48上的下轴承50和上轴承51及分别配合的下轴承压盖54和上轴承压盖52支撑在滑枕4上,在下的丝杠端头通过锁紧螺母55固定。相应地,设置在z向丝杠47上的螺母401固定在滑鞍3上。滑枕4的左右两个侧面上分别设置两个导轨,一共四个导轨即导轨41、导轨42、导轨43和导轨44,与滑鞍3上两个竖板305相对侧面上分别设置的两道z向导槽306嵌合连接,构成四条滑动副。在滑枕4上邻近左侧导轨
处设置光栅固定尺56,相匹配的光栅读数头设置在滑鞍3上。
[0063]
在滑鞍3的两个竖板305的上端面上分别固定一配重平衡气缸46的缸体,在滑枕4的上端面上固设一横杆402,在横杆402的两端分别设置一活塞杆,两个活塞杆上设置活塞分别插设在两个缸体中,在缸体位于活塞两侧的缸壁上设置进出口连接液压系统或气压系统(图中未示出),以实现当z向驱动电机40通过z向丝杠47带动滑枕4向上移动时,两个配重平衡气缸46带动活塞向上移动驱动横杆带动滑枕4上移,以减轻z向电机40带动工件上移的负荷;当z向驱动电机40带动滑枕4向下移动时,两个配重平衡气缸46产生在设定压力下阻止活塞向下移动的作用,平衡滑枕4在重力的作用下向下的荷载。
[0064]
在滑枕4的底端设置接口结构,实施电火花加工的电火花加工装置连接在该接口结构上。该接口设计结构可以连接电加工主轴和高精度的c轴等,实现电加工主轴的按需求替换的要求。
[0065]
通过上述的动梁式龙门结构,即可实现安装在滑枕4上的例如电加工主轴三维运动,进一步地,驱动电机由电机驱动器控制,电机驱动器上设置光栅口,如前所述,在龙门横梁2、滑鞍3和滑枕4上设置光栅动尺即读数头,在所述y向导轨、x向导轨和z向导轨附近均设有光栅固定尺,以实现滑枕4上连接的电加工主轴等组件,在例如工控机给电机驱动器发出脉冲指令,电机驱动器对各向驱动电机发出脉冲指令,令驱动电机驱动各组件中的相对移动部件运动、定位和重复定位。
[0066]
具体地,电机驱动器会把工控机的脉冲信号和光栅的位置反馈信号进行混合,然后将混合后的脉冲指令发送给驱动电机执行,从而完成对应的运动。本实施例中,使用的是方波信号。
[0067]
各向的驱动电机安装在机床的丝杠端上,丝杠连接着运动部件,光栅尺定尺安装在运动部件上,读数头固定在相对固定部件上,电机驱动器安装在电柜里,工控机(或上位机)根据程序生成对应的系统指令脉冲(弱电信号),发送给电机驱动器,电机驱动器将指令脉冲和位置反馈的脉冲混合后的脉冲数,转化成强电脉冲信号发送给执行部件驱动电机来驱动运动部件运动。
[0068]
光栅尺的分辨率为3微米,相比现有普通机床的5微米的分辨率,大大提高了,对应地,各个导轨丝杠系统中的丝杠可以选用d5006丝杠,精度上选用为c2级高精度丝杠,丝杠的螺距为6毫米,直径为50毫米,与现有机床丝杠用d6512,也有很大提升。各个导轨选用p级高精度导轨。因此,本实用新型可以实现精准定位和重复精准定位。
[0069]
另外,床身为铸造壳体,壳体的壁厚为15-20毫米。具体地,外壁的壁厚为20毫米,筋隔(内筋)厚度为15毫米。龙门横梁2、滑鞍3和滑枕4也可以是这样。
[0070]
再有,床身1、龙门横梁2、滑鞍3和滑枕4的铸件,其上设有若干铸造圆孔,这是因为需要增加强度和刚性,降低重量和应力集中,铸造孔可以很好地兼顾这些要求,增加铸件的优点并抑制其缺点。本实用新型提供的动梁式龙门数控电火花成形机床结构龙门横梁2通过床身1两侧布置的四条y向导轨11,13,16,17和2条y向丝杠14,18,2个光栅尺19,22实现y向运动,其中左侧通过y向导轨11和y向导轨13中间的一条y向丝杠14和y向电机12驱动,右侧通过y向导轨16和y向导轨17中间的一条y向丝杠18和y向电机20驱动,左右两条光栅尺19和22,分别为y向电机12和y向电机20提供位置定位,龙门横梁2左右两侧在系统的统一控制下,实现龙门横梁2两侧同步的y向运动。滑鞍3通过龙门横梁2上垂直布置的下导轨26和上
导轨27,在x向电机29带动的x向丝杠28的驱动下,实现滑鞍3的x向运动,位置精度由光栅尺保证。滑枕4的左侧布置了z向导轨41,42,右侧布置了z向导轨42,43,中间布置了z向电机40和z向丝杠47,光栅尺56布置在左侧z向导轨附近,z向电机40和x向丝杠47在光栅尺56的控制下,以及在导轨41,42,43,44的共同作用下,实现了电火花加工主轴z向的上下运动。
[0071]
由此即可以实现滑枕4上连接的加工头在工控机对各向驱动电机在光栅尺位置反馈到电机驱动器的闭环控制下在三维方向上的运动、定位和重复定位。实际应用中,例如包括一工控机,提供脉冲通过电机驱动器驱动电机带动导轨丝杠系统,使得龙门横梁2作为移动部件相对于床身在y向移动,滑鞍3作为移动部件相对于龙门横梁2在x向移动,滑枕4作为移动部件相对于滑鞍在z向移动,同时,龙门横梁2、滑鞍3和滑枕4带动其上的读数头移动,与相应的光栅定尺对应。光栅尺是位置反馈闭环控制电机机构,即提供位置反馈信号,它只反馈到电机驱动器而不反馈到工控机。
[0072]
本实用新型采用一体化床身1加龙门横梁2双驱结构实现x向和y向的轴向运动,使用滑鞍3和滑枕4的半包围结构,实现z轴的上下运动,z轴底端可以选配c轴、3rc轴和固定电加工用主轴,可以实现一机多用。一体化床身和立柱的结构,实现了双驱轴导轨和工作台面一次装夹完成加工,避免了组件方式加工的弊端,提高了加工精度和装配效率,固定工作台的方式,使随着工作台的油槽在充满油的使用条件下,有更高的承载和更高的加工精度,龙门双驱的龙门横梁2,使龙门横梁2的运动和承载更符合理想受力模型,使机床的y向行程和精度,达到很高的运动精度,同时很好的避免了现有技术中牛头式z轴的偏载缺陷,提升了机床y轴和z轴的运动精度,z轴的四导轨半包围的结构布置,使机床的刚性和运动精度,大大提升,满足了电火花成形机床高精度大行程的要求。
[0073]
对于大机床,微进给,对运动和速度的精细化控制要求更高,对结构的动态响应特性要求更高,要求移动部件刚性好、结构轻。在本实用新型中,所有的铸件都是壳体加筋隔的结构,结构简单,重量轻,刚性大。
[0074]
使用上述机构,用激光干涉仪检测出来的机床定位精度和重复定位精度,可以实现定位精度8秒,重复定位精度5秒的高精度加工零件, 满足粗糙度0.2微米、精度2微米的水平。本实用新型通过各个环节的高精度的匹配,可以满足航空航天的特种加工的需要,既满足大尺寸工件的加工,又保证很高的加工精度,因此,本实用新型属于国家重点开发的填补空白的设备。
[0075]
需要说明的是,上面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“底面”和“顶面”、“内”和
ꢀ“
外”分别指的是朝向或远离特定部件几何中心的方向。以上所述的具体实施例,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等, 均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1