一种用于锻造工件的锻造夹爪的制作方法
1.本实用新型涉及夹爪领域,具体为一种用于锻造工件的锻造夹爪。
背景技术:
2.目前,现有锻造工件用锻造夹爪结构过于简单,以至于功能性比较低,尤其是现有的锻造工件用锻造夹爪仅仅只具备夹持的功能,不方便对加工好的锻造工件进行自动转移,从而增加人工转移工件时的劳动力度。
技术实现要素:
3.(一)解决的技术问题
4.针对现有技术的不足,本实用新型提供了一种用于锻造工件的锻造夹爪,解决了背景技术中提出的问题。
5.(二)技术方案
6.为实现以上目的,本实用新型通过以下技术方案予以实现:一种用于锻造工件的锻造夹爪,包括工作台、转运机构和夹持机构,所述转运机构的顶部与工作台左端的底面固定连接,所述夹持机构的左端与转运机构的右端固定连接。
7.所述转运机构包括有旋转气缸、转运柱、换位轴、换位管、卡孔、换位柱和步进电机,所述旋转气缸的顶部与工作台左端的底面固定连接,所述转运柱的底面与旋转气缸的顶端固定连接,所述换位轴的顶端和底端分别通过轴承镶嵌于转运柱的顶面和底面,所述换位管的内腔活动套接于换位轴底端的外部,所述卡孔开设于转运柱的右侧面,所述换位柱的左端贯穿卡孔的内腔并与换位管的右侧面固定连接,所述步进电机的左端与转运柱顶面的左侧固定连接。
8.优选的,所述夹持机构包括有适位气缸、主架、紧位气缸、受力块、受力管、缓冲弹簧、夹爪、制冷器、入水口和封塞,所述适位气缸的左端与换位柱的右端固定连接,所述主架左侧面的中部与适位气缸的右端固定连接,两个所述紧位气缸相互靠近的一端与主架的正面和背面固定连接,两个所述受力块相互远离的一面与两个紧位气缸相互靠近的一端固定连接,两个所述受力管相互远离一端的内腔活动套接于两个两个受力块的外部,两个所述缓冲弹簧的顶端和底端分别与受力块和受力管相互靠近的一面固定连接,两个所述夹爪相互远离的一面与两个受力管相互靠近的一端固定连接,两个所述制冷器相互靠近的一端分别与两个夹爪相互远离一面的左侧,两个所述入水口相互靠近的一端分别与两个夹爪相互远离一面的右侧连通,两个所述封塞的内腔分别套接于两个入水口相互远离的一端。
9.优选的,所述换位轴的表面与换位管的内壁螺纹连接。
10.优选的,所述换位柱的表面与卡孔的内壁滑动连接。
11.优选的,所述受力块表面的形状与受力管内腔的形状均为矩形。
12.优选的,所述旋转气缸的型号为hrq200a。
13.(三)有益效果
14.本实用新型提供了一种用于锻造工件的锻造夹爪。具备以下有益效果:
15.1、该用于锻造工件的锻造夹爪,通过设置的转运机构,首先控制步进电机正转,步进电机正传就能够带动换位轴正转,换位轴正转就能够带动换位管和换位柱同时向上移动,换位柱向上移动就可以控制夹持机构的夹持高度,从而方便夹持机构夹持不同高度的锻造工件,然后控制旋转气缸启动,旋转气缸启动就能够带动转运柱转动,转运柱转动就能够带动换位柱和夹持机构同时转动,通过控制夹持机构的转动就可以控制加工好的工件进行转动,这样就可以快速完成工件的自转移,以至于降低了工作人员的劳动力度。
16.2、该用于锻造工件的锻造夹爪,通过设置的夹持机构,首先控制适位气缸启动,适位气缸启动就能可以快速调节夹持结构的位置,然后控制两个紧位气缸启动,两个紧位气缸启动就能够带动两个受力块向相对的方向移动,两个受力块向相对的方向移动就能够带动两个受力管向相对的方向移动,两个受力管向相对的方向移动就能够带动两个夹爪同时向相对的方向移动,当两个夹爪相互靠近的一面与锻造工件的表面充分接触时,这时就快速完成了工件的夹持和固位,然后控制制冷器启动,制冷器启动就可以快速降低夹爪的温度,从而促使夹爪具备的降温的功能,从而有效完成了锻造工件的快速冷却,这样就很大程度提高了锻造夹爪的实用性。
附图说明
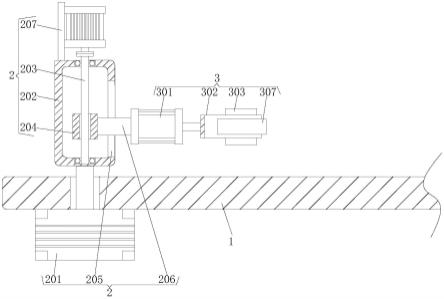
17.图1为本实用新型结构示意图;
18.图2为本实用新型夹持机构的横向剖视图;
19.图3为本实用新型图2中a处的放大图。
20.其中,1、工作台;2、转运机构;201、旋转气缸;202、转运柱;203、换位轴;204、换位管;205、卡孔;206、换位柱;207、步进电机;3、夹持机构;301、适位气缸;302、主架;303、紧位气缸;304、受力块;305、受力管;306、缓冲弹簧;307、夹爪;308、制冷器;309、入水口;310、封塞。
具体实施方式
21.下面结合附图和实施例对本实用新型作进一步的说明。
22.本实用新型实施例提供一种用于锻造工件的锻造夹爪,如图1-3所示,包括工作台1、转运机构2和夹持机构3,转运机构2的顶部与工作台1左端的底面固定连接,夹持机构3的左端与转运机构2的右端固定连接。
23.转运机构2包括有旋转气缸201、转运柱202、换位轴203、换位管204、卡孔205、换位柱206和步进电机207,旋转气缸201的顶部与工作台1左端的底面固定连接,转运柱202的底面与旋转气缸201的顶端固定连接,换位轴203的顶端和底端分别通过轴承镶嵌于转运柱202的顶面和底面,换位管204的内腔活动套接于换位轴203底端的外部,卡孔205开设于转运柱202的右侧面,换位柱206的左端贯穿卡孔205的内腔并与换位管204的右侧面固定连接,步进电机207的左端与转运柱202顶面的左侧固定连接。
24.夹持机构3包括有适位气缸301、主架302、紧位气缸303、受力块304、受力管305、缓冲弹簧306、夹爪307、制冷器308、入水口309和封塞310,适位气缸301的左端与换位柱206的右端固定连接,主架302左侧面的中部与适位气缸301的右端固定连接,两个紧位气缸303相
互靠近的一端与主架302的正面和背面固定连接,两个受力块304相互远离的一面与两个紧位气缸303相互靠近的一端固定连接,两个受力管305相互远离一端的内腔活动套接于两个两个受力块304的外部,两个缓冲弹簧306的顶端和底端分别与受力块304和受力管305相互靠近的一面固定连接,两个夹爪307相互远离的一面与两个受力管305相互靠近的一端固定连接,两个制冷器308相互靠近的一端分别与两个夹爪307相互远离一面的左侧,两个入水口309相互靠近的一端分别与两个夹爪307相互远离一面的右侧连通,两个封塞310的内腔分别套接于两个入水口309相互远离的一端。
25.进一步的,换位轴203的表面与换位管204的内壁螺纹连接,如图1所示,换位轴203可以控制换位管204进行上下移动,进而控制夹持机构3和工件的上下移动。
26.进一步的,换位柱206的表面与卡孔205的内壁滑动连接,如图1所示,卡孔205可以对换位柱206移动的方向进行限定。
27.进一步的,受力块304表面的形状与受力管305内腔的形状均为矩形,如图3所示,受力块304可以对受力管305移动的方向进行限定。
28.进一步的,旋转气缸201的型号为hrq200a。
29.工作原理:使用时,首先控制步进电机207正转,步进电机207正传就能够带动换位轴203正转,换位轴203正转就能够带动换位管204和换位柱206同时向上移动,换位柱206向上移动就可以控制夹持机构3的夹持高度,从而方便夹持机构3夹持不同高度的锻造工件,首先控制适位气缸301启动,适位气缸301启动就能可以快速调节夹持结构的位置,然后控制两个紧位气缸303启动,两个紧位气缸303启动就能够带动两个受力块304向相对的方向移动,两个受力块304向相对的方向移动就能够带动两个受力管305向相对的方向移动,两个受力管305向相对的方向移动就能够带动两个夹爪307同时向相对的方向移动,当两个夹爪307相互靠近的一面与锻造工件的表面充分接触时,这时就快速完成了工件的夹持和固位,然后控制制冷器308启动,制冷器308启动就可以快速降低夹爪307的温度,从而促使夹爪307具备的降温的功能,从而有效完成了锻造工件的快速冷却,最后控制旋转气缸201启动,旋转气缸201启动就能够带动转运柱202转动,转运柱202转动就能够带动换位柱206和夹持机构3同时转动,通过控制夹持机构3的转动就可以控制加工好的工件进行转动,工件转移到指定位置后,这时再次控制两个紧位气缸303启动,紧位气缸303启动就能够控制两个夹爪307与锻造工件的表面脱离,这样就可以快速完成工件的自转移,再次控制旋转气缸201启动,旋转气缸201启动就能够带动夹持机构3回到初始位置,这样就可以促使整个夹爪307可以持续使用。
30.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1