蜂鸣器组装夹持装置的制作方法
1.本实用新型涉及蜂鸣器加工技术领域,尤其涉及蜂鸣器组装夹持装置。
背景技术:
2.蜂鸣器是一种一体化结构的电子讯响器,采用直流电压供电,广泛应用于计算机、打印机、复印机、报警器、电子玩具、汽车电子设备、电话机、定时器等电子产品中作发声器件。蜂鸣器主要分为压电式蜂鸣器和电磁式蜂鸣器两种类型。蜂鸣器在电路中用字母“h”或“ha”(旧标准用“fm”、“zzg”、“lb”、“jd”等)表示。
3.与现有技术相比较存在的问题:在对蜂鸣器进行绕线操作时,需要将金属细线夹持并绕接到蜂鸣器的一侧,现有的夹持机构由于夹持部位为金属,在对金属细线进行夹持时会导致其形变断裂,在蜂鸣器进行绕线时,形变部分的金属细线会掉落在操作台面或者运行的零部件上,影响装置运行稳定性和准确性,为此,我们提出了蜂鸣器组装夹持装置,用于解决上述问题。
技术实现要素:
4.本实用新型的目的在于克服现有技术的不足,提供蜂鸣器组装夹持装置。
5.本实用新型解决其技术问题是通过以下技术方案实现的:包括操作台,所述操作台的顶部中央设置有运输机构,所述操作台的顶部边缘设置有绕线机构,所述操作台靠近绕线机构的一侧设置有引线机构,所述操作台靠近引线机构的一侧设置有夹持机构,所述夹持机构包括固定座,所述固定座通过螺栓固定于操作台的顶部,所述固定座的一侧设置有马达b,所述马达b的输出端设置有丝杆a,所述丝杆a的外侧转动连接有滑动座,所述滑动座的一侧设置有马达c,所述马达c的输出端设置有丝杆b,所述丝杆b的外侧转动连接有连接座,所述连接座的顶部设置有电磁阀b,所述电磁阀b的底部设置有夹持座b,所述夹持座b与连接座滑动连接,所述夹持座b的一侧设置有一对夹块,所述夹块的一侧设置有橡胶条b。
6.作为本实用新型再进一步的方案:所述操作台的底部设置有多个支撑柱。
7.作为本实用新型再进一步的方案:所述运输机构包括电机,所述电机通过螺栓固定于操作台的下表面,所述电机的输出端设置有驱动轴,所述驱动轴的顶部设置有运输盘,所述运输盘的上表面设置有多个转动底座,多个所述转动底座的外侧均设置有旋转台,所述操作台靠近电机的一侧设置有控制器。
8.作为本实用新型再进一步的方案:所述绕线机构包括安装架,所述安装架通过螺栓固定于操作台的顶部,所述安装架的顶部的下表面设置有补光灯,所述安装架的一侧设置有红外传感器,所述安装架的顶部设置有伸缩柱,所述伸缩柱的底部设置有马达a,所述马达a的输出端设置有绕线块,所述操作台的一侧设置有控制机构。
9.作为本实用新型再进一步的方案:所述引线机构包括升降台,所述升降台通过螺栓固定于操作台的顶部,所述升降台的内部设置有电磁阀a,所述电磁阀a的顶部设置有夹持座a,所述夹持座a与升降台滑动连接,所述夹持座a的一侧设置有一对引线夹,所述引线
夹的侧壁设置有橡胶条a,所述引线夹的一侧设置有切刀。
10.作为本实用新型再进一步的方案:所述控制机构包括安装底座,所述安装底座通过螺栓固定于操作台的一侧,所述安装底座的顶部设置有控制主机,所述控制主机的一侧设置有控制按钮,所述控制主机靠近控制按钮的一侧设置有显示屏。
11.作为本实用新型再进一步的方案:所述红外传感器、伸缩柱、马达a、马达b和马达c均与控制器电性连接。
12.综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
13.本装置通过设置有夹持机构,马达b通过丝杆a带动滑动座移动,马达c通过丝杆b带动连接座移动,电磁阀b带动夹持座b移动,夹持座b通过外接气源带动夹块移动,一对夹块配合对金属细线进行夹持,一对夹块的夹持部位均设置有橡胶条b,避免夹持时金属细线发生形变断裂,防止金属细线掉落在操作台面或者运行的零部件上,影响装置运行稳定性和准确性;通过设置有运输机构,需要加工的蜂鸣器放置在旋转台上,此时启动电机,电机通过驱动轴带动运输盘转动,运输盘转动带动转动底座和旋转台移动,对蜂鸣器进行运输;通过设置有绕线机构,当蜂鸣器到达绕线机构位置时,红外传感器会识别旋转台上是否放置有蜂鸣器,补光灯为装置提供照明,当识别存在蜂鸣器时,控制器控制伸缩柱启动,伸缩柱带动马达a向下移动,马达a启动,并带动绕线块转动,绕线块转动带动蜂鸣器转动,对蜂鸣器进行绕线操作。
附图说明
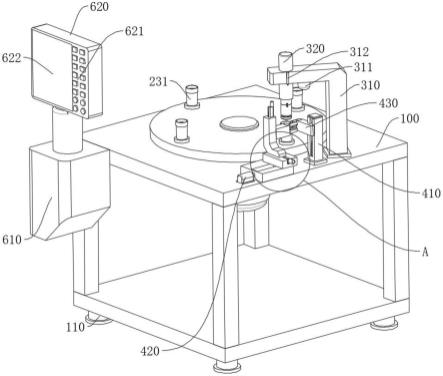
14.图1示出了根据本实用新型实施例提供的轴测结构示意图;
15.图2示出了根据本实用新型实施例提供的图1中a部位放大结构示意图;
16.图3示出了根据本实用新型实施例提供的左视剖视结构示意图;
17.图4示出了根据本实用新型实施例提供的图3中b部位放大结构示意图;
18.图5示出了根据本实用新型实施例提供的图3中c部位放大结构示意图;
19.图6示出了根据本实用新型实施例提供的轴测剖视结构示意图;
20.图7示出了根据本实用新型实施例提供的图6中d部位放大结构示意图。
21.图例说明:
22.100操作台、110支撑柱、210电机、211驱动轴、220运输盘、230转动底座、240控制器、231旋转台、310安装架、311补光灯、312红外传感器、320伸缩柱、330马达a、331绕线块、410升降台、420电磁阀a、430夹持座a、440引线夹、441橡胶条a、442切刀、510固定座、520马达b、521丝杆a、530滑动座、540马达c、550丝杆b、560连接座、561电磁阀b、570夹持座b、580夹块、581橡胶条b、610安装底座、620控制主机、621控制按钮、622显示屏。
具体实施方式
23.请参阅图1-7,本实用新型提供一种技术方案:包括操作台100,所述操作台100的顶部中央设置有运输机构,所述操作台100的顶部边缘设置有绕线机构,所述操作台100靠近绕线机构的一侧设置有引线机构,所述操作台100靠近引线机构的一侧设置有夹持机构,所述夹持机构包括固定座510,所述固定座510通过螺栓固定于操作台100的顶部,所述固定座510的一侧通过螺栓固定有马达b520,所述马达b520的输出端固定有丝杆a521,所述丝杆
a521的外侧转动连接有滑动座530,所述滑动座530的一侧通过螺栓固定有马达c540,所述马达c540的输出端固定有丝杆b550,所述丝杆b550的外侧转动连接有连接座560,所述连接座560的顶部通过螺栓固定有电磁阀b561,所述电磁阀b561的底部固定有夹持座b570,所述夹持座b570与连接座560滑动连接,所述夹持座b570的一侧滑动连接有一对夹块580,所述夹块580的一侧固定有橡胶条b581;通过设置有夹持机构,马达b520通过丝杆a521带动滑动座530移动,马达c540通过丝杆b550带动连接座560移动,电磁阀b561带动夹持座b570移动,夹持座b570通过外接气源带动夹块580移动,一对夹块580配合对金属细线进行夹持,一对夹块580的夹持部位均设置有橡胶条b581,避免夹持时金属细线发生形变断裂,防止金属细线掉落在操作台面或者运行的零部件上,影响装置运行稳定性和准确性。
24.具体的,所述操作台100的底部通过螺栓固定有多个支撑柱110;通过设置有支撑柱110用于支撑装置。
25.具体的,所述运输机构包括电机210,所述电机210通过螺栓固定于操作台100的下表面,所述电机210的输出端固定有驱动轴211,所述驱动轴211的顶部通过螺栓固定有运输盘220,所述运输盘220的上表面通过螺栓固定有多个转动底座230,多个所述转动底座230的外侧均通过轴承转动连接有旋转台231,所述操作台100靠近电机210的一侧通过螺栓固定有控制器240;通过设置有运输机构,需要加工的蜂鸣器放置在旋转台231上,此时启动电机210,电机210通过驱动轴211带动运输盘220转动,运输盘220转动带动转动底座230和旋转台231移动,对蜂鸣器进行运输。
26.具体的,所述绕线机构包括安装架310,所述安装架310通过螺栓固定于操作台100的顶部,所述安装架310的顶部的下表面通过螺栓固定有补光灯311,所述安装架310的一侧固定有红外传感器312,所述安装架310的顶部通过螺栓固定有伸缩柱320,所述伸缩柱320的底部通过螺栓固定有马达a330,所述马达a330的输出端固定有绕线块331,所述操作台100的一侧设置有控制机构;通过设置有绕线机构,当蜂鸣器到达绕线机构位置时,红外传感器312会识别旋转台231上是否放置有蜂鸣器,补光灯311为装置提供照明,当识别存在蜂鸣器时,控制器240控制伸缩柱320启动,伸缩柱320带动马达a330向下移动,马达a330启动,并带动绕线块331转动,绕线块331转动带动蜂鸣器转动,对蜂鸣器进行绕线操作。
27.具体的,所述引线机构包括升降台410,所述升降台410通过螺栓固定于操作台100的顶部,所述升降台410的内部固定有电磁阀a420,所述电磁阀a420的顶部固定有夹持座a430,所述夹持座a430与升降台410滑动连接,所述夹持座a430的一侧设置有一对引线夹440,所述引线夹440的侧壁通过螺栓固定有橡胶条a441,所述引线夹440的一侧固定有切刀442;通过设置有引线机构,金属细线通过两个引线夹440放置在蜂鸣器上,此时控制器240控制伸缩柱320启动,伸缩柱320带动马达a330向下移动,马达a330启动,并带动绕线块331转动,绕线块331转动带动蜂鸣器转动,对蜂鸣器进行绕线操作,绕线完成后电磁阀a420启动,电磁阀a420带动夹持座a430向下移动,将金属细线下压,此时夹块580对金属细线进行夹持,马达b520通过丝杆a521带动夹块580和金属细线移动,在金属细线接触切刀442时会被切断。
28.具体的,所述控制机构包括安装底座610,所述安装底座610通过螺栓固定于操作台100的一侧,所述安装底座610的顶部固定有控制主机620,所述控制主机620的一侧设置有控制按钮621,所述控制主机620靠近控制按钮621的一侧设置有显示屏622;通过设置有
控制机构,控制按钮621控制装置的运行,显示屏622显示装置运行的实时数据,增加装置的自动化和可视化程度。
29.具体的,所述红外传感器312、伸缩柱320、马达a330、马达b520和马达c540均与控制器240电性连接;通过设置有控制器240控制装置的运行。
30.工作原理:使用时,把需要加工的蜂鸣器放置在旋转台231上,此时启动电机210,电机210通过驱动轴211带动运输盘220转动,运输盘220转动带动转动底座230和旋转台231移动,对蜂鸣器进行运输,当蜂鸣器到达绕线机构位置时,红外传感器312会识别旋转台231上是否放置有蜂鸣器,补光灯311为装置提供照明,当识别存在蜂鸣器时,启动马达b520,马达b520通过丝杆a521带动滑动座530移动,马达c540通过丝杆b550带动连接座560移动,电磁阀b561带动夹持座b570移动,夹持座b570通过外接气源带动夹块580移动,一对夹块580配合对金属细线进行夹持,把金属细线通过两个引线夹440放置在蜂鸣器上,此时控制器240控制伸缩柱320启动,伸缩柱320带动马达a330向下移动,马达a330启动,并带动绕线块331转动,绕线块331转动带动蜂鸣器转动,对蜂鸣器进行绕线操作,绕线完成后电磁阀a420启动,电磁阀a420带动夹持座a430向下移动,将金属细线下压,此时夹块580对金属细线进行夹持,马达b520通过丝杆a521带动夹块580和金属细线移动,在金属细线接触切刀442时会被切断,完成对金属细线的夹持操作,蜂鸣器会被运输机构继续运输,进行下一步的加工。
31.本实用新型虽公开了实施例和附图,但是本领域的技术人员可以理解:在不脱离本实用新型及所附权利要求的精神和范围内,各种替换、变化和修改都是可能的,因此,本实用新型的范围不局限于实施例和附图所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1