基于FMS柔性加工的滚轮智能化生产线的制作方法
基于fms柔性加工的滚轮智能化生产线
技术领域
1.本实用新型涉及智能化生产线技术领域,尤其是涉及一种基于fms柔性加工的滚轮智能化生产线。
背景技术:
2.柔性制造是指在计算机支持下,能适应加工对象变化的制造系统。柔性制造系统(fms)是以数控机床或加工中心为基础,配以物料传送装置组成的生产系统。该系统由电子计算机实现自动控制,能在不停机的情况下,满足多品种的加工。在生产制备滚轮时,传统的生产线智能化程度低,且产品在各机构之间的抓取搬运效率低,这些都是亟待解决的问题。
技术实现要素:
3.针对现有技术存在的不足,本实用新型的目的是提供一种基于fms柔性加工的滚轮智能化生产线,该种基于fms柔性加工的滚轮智能化生产线的智能化程度高,且能够有效提升产品在各机构之间的抓取搬运效率。
4.本实用新型的上述实用新型目的是通过以下技术方案得以实现的:基于fms柔性加工的滚轮智能化生产线,包括沿生产工艺路线依次设置的第一数控机床、毛坯上料仓、毛坯下料仓、第二数控车床、热处理机构以及用于将产品在上述各机构之间抓取搬运的关节机器人,还包括用于为生产线上的各机构提供电能并实现电动控制的电控柜;所述第一数控机床和所述第二数控车床的一侧分别配套设置有第一排屑机构和第二排屑机构;所述关节机器人的工作端上设有两个抓取机构,所述抓取机构包括底座、滑动设置在所述底座上并且可通过电控来进行聚拢或张开的多个气动卡爪以及垂直设置在所述底座上并且可进行弹性伸缩的多个弹性柱。
5.在一些实施例中,所述关节机器人的周围铺有多块垫板。
6.在一些实施例中,所述关节机器人的工作端上还设有吹气机构。
7.在一些实施例中,每块所述气动卡爪与产品直接接触的一侧均设有垫块。
8.在一些实施例中,所述毛坯上料仓和所述毛坯下料仓均为料筐式料仓,所述料筐式料仓包括料框以及设于所述料框内的托盘,所述托盘的上端面开设有用于放置产品的定位凹槽,下端面开设有用于搬运设备进行搬运操作的沟槽,所述料筐式料仓上还设有用于感应搬运设备进入的提示反馈机构。
9.在一些实施例中,所述第一数控机床和所述第二数控车床的刀具均为内冷刀具,所述内冷刀具可以把切削液定向地引向加工部位。
10.综上所述,本实用新型具有以下有益效果:
11.该种基于fms柔性加工的滚轮智能化生产线,设有关节机器人,可通过关节机器人来将产品在各机构之间抓取搬运,智能化程度高,在关节机器人的工作端设有两个抓取机构,可借助抓取机构中的多个气动卡爪来将产品抓起,并且抓取机构还包括多根弹性柱,在
抓取时,可借助多根弹性柱来将产品牢牢按住,从而确保多个气动卡爪能够将产品稳定抓起,放料时,松开气动卡爪即可,此时弹性柱瞬时恢复初始状态,在弹性柱的弹性复位作用下,产品将被迅速从抓取机构上推走,实现快速放料,由此有效提升了产品在各机构之间的抓取搬运效率。
附图说明
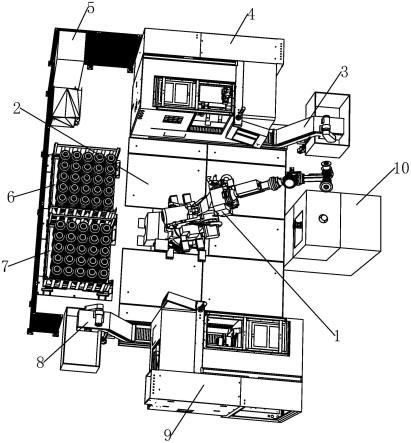
12.图1为本实用新型的俯视图;
13.图2为本实用新型的关节机器人的整体结构图;
14.图3为本实用新型的关节机器人的工作端的结构详图。
15.图中:1、关节机器人;101、抓取机构;1011、底座;1012、气动卡爪;1013、垫块;1014、弹性柱;102、吹气机构;2、垫板;3、第一排屑机构;4、第一数控车床;5、电控柜;6、毛坯上料仓;7、毛坯下料仓;8、第二排屑机构;9、第二数控车床;10、热处理机构。
具体实施方式
16.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本实用新型,而不能理解为对本实用新型的限制。
17.在本实用新型的描述中,需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
18.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
19.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
20.参照图1-3,基于fms柔性加工的滚轮智能化生产线,包括沿生产工艺路线依次设置的第一数控机床4、毛坯上料仓6、毛坯下料仓7、第二数控车床9、热处理机构10以及用于将产品在上述各机构之间抓取搬运的关节机器人1,还包括用于为生产线上的各机构提供电能并实现电动控制的电控柜5,其中热处理机构10可选用中频火机床,关节机器人1可选用fanuc robot r—2000ic系列165f关节机器人,关节机器人1可采用r-30ib控制器,该控制器是集中了fanuc各种最先进优点的新一代机器人控制器,具有性能高,响应快,安全性能强等特点,作为集成了视学功能的机器人控制器,将大量节约为实现柔性生产所需的周
边设备成本,基于fanuc自身软件平台研发的各种功能强大的点焊、涂胶、搬运等专用软件,在使机器人的操作变得更加简单的同时,也使系统具有彻底免疫计算机病毒的功能,并且该种关节机器人1可采用pendant new fanuc新一代机器人用示教盒,减轻了自重,并通过巧妙的设计改变了示教盒的重心,改善了整体的平衡性,使示教、操作变得更轻松,还增加了附加轴切换的快捷键及电源指示灯,简化了操作步骤,还可在示教盒上选装usb接口,使程序的备份导入变得更方便,另外,可在关节机器人1上安装视觉识别系统,选用2d视觉系统识别工件表面特征,对工件进行定位,从而可使关节机器人1对工件进行位置的识别及调整,本领域技术人员可以对视觉识别系统进行个性化调整,以满足不同的操作需求,本实施例中的视觉识别系统可采用康耐视视觉识别系统,该品牌的视觉识别系统具有高精度,高速度,高准确率等优点,能准确识别产品的正误并经控制器处理快速的将检测结果产送给总控系统,总控系统根据识别信息发出指令操控转向上下料机构动作;第一数控机床4和第二数控车床9的一侧分别配套设置有第一排屑机构3和第二排屑机构8,借助排屑机构实现对数控机床的排屑;关节机器人1的工作端上设有两个抓取机构101,两个抓取机构101配合使用,一个负责取料,一个负责放料,各司其职,抓取机构101包括底座1011、滑动设置在底座1011上并且可通过电控来进行聚拢或张开的多个气动卡爪1012以及垂直设置在底座1011上并且可进行弹性伸缩的多个弹性柱1014,作为优选的方案,气动卡爪1012的数量可设置成三个,三个气动卡爪1012足以将产品稳固抓起。
21.通过以上技术方案,生产时,粗车毛坯通过第一数控机床4加工得到半精车外圆及半精车内孔的产品,接着将产品通过热处理机构10进行外圆中频淬火,最后将淬火之后的产品通过第二数控车床9加工得到精车内孔的产品,此时的产品即为成品,上述期间可通过关节机器人1来将产品在各机构之间抓取搬运,智能化程度高,在关节机器人1的工作端设有两个抓取机构101,可借助抓取机构101中的多个气动卡爪1012来将产品抓起,具体为先将多个气动卡爪1012聚拢再一起伸入至产品的内孔中,然后再将多个气动卡爪1012同步扩散,使多个气动卡爪1012与产品的内孔壁牢牢贴合,由此实现对产品的抓取,抓取机构101还包括多根弹性柱1014,在抓取时,可借助多根弹性柱1014来将产品牢牢按住,从而确保多个气动卡爪1012能够将产品稳定抓起,放料时,松开气动卡爪1012即可,此时弹性柱1014瞬时恢复初始状态,在弹性柱1014的弹性复位作用下,产品将被迅速从抓取机构101上推走,实现快速放料,由此有效提升了产品在各机构之间的抓取搬运效率。
22.在一些实施例中,如图1所示,关节机器人1的周围铺有多块垫板2,垫板2选用防滑垫板及接水盘,垫板2用于保护地面的整洁干净,也用于防滑,以提升操作的安全性。
23.在一些实施例中,为保证加工后产品表面的清洁、保证产品能够被稳固抓取,如图2和图3所示,关节机器人1的工作端上还设有吹气机构102,用于清理加工后残留在产品表面的切屑。
24.在一些实施例中,如图3所示,每块气动卡爪1012与产品直接接触的一侧均设有垫块1013,垫块1013优选为铜块,用于防止气动卡爪1012对产品产生压痕,从而影响产品的光洁度和精度。
25.在一些实施例中,毛坯上料仓6和毛坯下料仓7均为料筐式料仓,料筐式料仓包括料框以及设于料框内的托盘,托盘的上端面开设有用于放置产品的定位凹槽,定位凹槽设有多个,可在每个定位凹槽内堆放产品,关节机器人1可借助视觉识别系统来对所要抓取产
品的位置进行识别,动作要求稳定可靠,托盘的下端面开设有用于搬运设备进行搬运操作的沟槽,料筐式料仓上还设有用于感应搬运设备进入的提示反馈机构,搬运设备一般采用叉车,可将叉车的叉子沿着沟槽插入,并通过提示反馈机构来判断叉车的叉子是否插入到位,以提升搬运的效率和安全性。
26.在一些实施例中,第一数控机床4和第二数控车床9的刀具均为内冷刀具,内冷刀具可以把切削液定向地引向加工部位,实现从接触区域把热量排放出去,有利于延长刀具使用寿命、优化切屑排放、改善工件表面质量并减少对工件表面的影响。
27.本具体实施例仅仅是对本实用新型的解释,其并不是对本实用新型的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本实用新型的权利要求范围内都受到专利法的保护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1