一种用于住房建筑的机器人焊接旋转定位台的制作方法
1.本实用新型涉及机器人焊接技术领域,具体为一种用于住房建筑的机器人焊接旋转定位台。
背景技术:
2.随着电子技术、计算机技术、数控及机器人技术的发展,自动焊接机器人技术已日益成熟。机器人焊接因其具有极高的稳定性和较高的焊接质量,同时提高劳动生产率、改善工人劳动强度、可在有害环境下工作和降低对工人操作技术要求的特点,在住房建筑焊接领域有着广泛的应用。为了配合焊接机器人的焊接工作,会将焊接材料摆放在旋转定位台上进行焊接。
3.现有的旋转定位台大多仅具有单焊接工位,焊接结束后人为取放材料后才能进行下一焊接任务,使得焊接的效率较低,同时工作人员取放材料离焊接机器人太近,存在一定的安全隐患。
技术实现要素:
4.本实用新型的目的在于提供一种用于住房建筑的机器人焊接旋转定位台,以解决上述背景技术中提出的现有的旋转定位台大多仅具有单焊接工位,焊接结束后人为取放材料后才能进行下一焊接任务,使得焊接的效率较低,同时工作人员取放材料离焊接机器人太近,存在一定的安全隐患的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种用于住房建筑的机器人焊接旋转定位台,包括基座,所述基座的顶端固定设置有旋转台,所述旋转台的顶端转动连接有调向转盘,所述调向转盘顶端的两侧均固定设置有焊接工位,两个所述焊接工位均包括工位平台、焊接转盘和定位夹台,所述工位平台的顶端转动连接有焊接转盘,所述焊接转盘的顶端固定设置有定位夹台,所述定位夹台顶端的两侧均开设有定位滑槽,两个所述定位滑槽的内部均转动连接有双向螺杆,两个所述双向螺杆的中部均传动连接有两个传动滑块,相对应的两个所述传动滑块之间均固定设置有定位挡板,该旋转定位台采用双工位设计,使得材料的焊接和取放可同时进行,摆放后的焊接材料可自动进行定位夹持,降低了工作人员的劳动强度,稳定可靠,从而提高了材料的焊接效率,增大了工作人员操作时与焊接机器人的间距,提高操作时的安全性。
6.优选的,所述定位夹台的正面固定安装有开关板,所述开关板的表面固定安装有换向开关和夹持开关,操作简单便捷。
7.优选的,两个所述定位挡板内侧的两端均开设有调节滑槽,四个所述调节滑槽内壁的一侧均固定安装有电控伸缩杆,四个所述电控伸缩杆的一端均固定设置有定位夹板,所述定位夹台一侧的两端均固定安装有同步电机,两个所述同步电机的输出端分别与两个双向螺杆的一端固定连接,两个所述同步电机和四个电控伸缩杆均通过夹持开关与外接电源电性连接,摆放后的焊接材料可自动进行定位夹持,降低了工作人员的劳动强度,稳定可
靠。
8.优选的,所述旋转台的内部固定安装有正反转电机,所述正反转电机的输出端与调向转盘的底端固定连接,所述正反转电机通过换向开关与外接电源电性连接,采用双工位设计,使得材料的焊接和取放可同时进行,提高了焊接效率。
9.优选的,所述工位平台的底端固定安装有减速电机,所述减速电机通过外接开关与电源电性连接,能够根据焊接需求,自动调整材料的方向,为焊接提供便利。
10.优选的,所述基座底端的四个边角均固定安装有防滑脚垫,能够提高定位台摆放的稳定性,不易滑动偏移。
11.与现有技术相比,本实用新型的有益效果是:该旋转定位台采用双工位设计,使得材料的焊接和取放可同时进行,摆放后的焊接材料可自动进行定位夹持,降低了工作人员的劳动强度,稳定可靠,从而提高了材料的焊接效率,增大了工作人员操作时与焊接机器人的间距,提高操作时的安全性。
附图说明
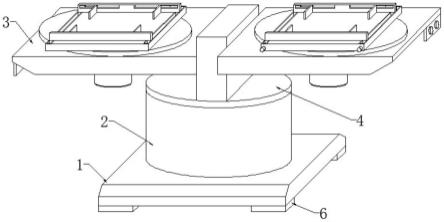
12.图1为本实用新型定位台的结构示意图;
13.图2为本实用新型焊接工位的结构示意图;
14.图3为本实用新型定位夹台的俯视截面图;
15.图4为本实用新型基座的正视截面图。
16.图中:1、基座;2、旋转台;3、焊接工位;31、工位平台;32、焊接转盘;33、定位夹台;34、减速电机;35、同步电机;36、定位滑槽;37、定位挡板;38、调节滑槽;39、定位夹板;310、电控伸缩杆;311、传动滑块;312、开关板;313、双向螺杆;4、调向转盘;5、正反转电机;6、防滑脚垫。
具体实施方式
17.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
18.请参阅图1-4,本实用新型提供了一种用于住房建筑的机器人焊接旋转定位台,包括基座1,基座1的顶端固定设置有旋转台2,旋转台2的顶端转动连接有调向转盘4,调向转盘4顶端的两侧均固定设置有焊接工位3,两个焊接工位3均包括工位平台31、焊接转盘32和定位夹台33,工位平台31的顶端转动连接有焊接转盘32,焊接转盘32的顶端固定设置有定位夹台33,定位夹台33顶端的两侧均开设有定位滑槽36,两个定位滑槽36的内部均转动连接有双向螺杆313,两个双向螺杆313的中部均传动连接有两个传动滑块311,相对应的两个传动滑块311之间均固定设置有定位挡板37,摆放后的焊接材料可自动进行定位夹持,降低了工作人员的劳动强度,稳定可靠,双工位设计,使得材料的焊接和取放可同时进行,从而提高了材料的焊接效率,增大了工作人员操作时与焊接机器人的间距,提高操作时的安全性。
19.定位夹台33的正面固定安装有开关板312,开关板312的表面固定安装有换向开关和夹持开关,两个定位挡板37内侧的两端均开设有调节滑槽38,四个调节滑槽38内壁的一侧均固定安装有电控伸缩杆310,四个电控伸缩杆310的一端均固定设置有定位夹板39,定
位夹台33一侧的两端均固定安装有同步电机35,两个同步电机35的输出端分别与两个双向螺杆313的一端固定连接,两个同步电机35和四个电控伸缩杆310均通过夹持开关与外接电源电性连接,旋转台2的内部固定安装有正反转电机5,正反转电机5的输出端与调向转盘4的底端固定连接,正反转电机5通过换向开关与外接电源电性连接,该旋转定位台采用双工位设计,使得材料的焊接和取放可同时进行,从而提高了材料的焊接效率,增大了工作人员操作时与焊接机器人的间距,提高操作时的安全性。
20.工位平台31的底端固定安装有减速电机34,减速电机34通过外接开关与电源电性连接,基座1底端的四个边角均固定安装有防滑脚垫6,能够根据焊接需求,自动调整材料的朝向,为机器人的焊接提供了便利。
21.本技术实施例在使用时:将定位台安装平稳后接通电源,把待焊接的材料放置在定位夹台33上,按压夹持开关,此时对应的同步电机35和电控伸缩杆310会工作,分别带动定位挡板37和定位夹板39运动,对材料的底部进行夹持,摆放后的焊接材料可自动进行定位夹持,降低了工作人员的劳动强度,稳定可靠,定位后按压换向开关,此时正反转电机5会通过调向转盘4自动将材料送入焊接机器人的工作区进行焊接工作,此时工作人员可在另一个焊接工位3上取放材料,该旋转定位台采用双工位设计,使得材料的焊接和取放可同时进行,从而提高了材料的焊接效率,增大了工作人员操作时与焊接机器人的间距,提高操作时的安全性。
22.尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1