一种可开关磁轮智能焊接小车的制作方法
1.本实用新型属于焊接车领域,尤其是涉及一种可开关磁轮智能焊接小车。
背景技术:
2.焊接小车多通过将驱动轮卡扣在轨道上实现连接,依靠驱动轮的转动使小车绕轨道运行,但驱动轮的安装较为繁琐,且无法适应其他轨道,若驱动轮卡扣不严,在小车的运行中易产生偏移,影响焊接质量。
3.且驱动焊枪转动多通过电机直接驱动,转动幅度较大,使焊接位置不准确。
技术实现要素:
4.本实用新型的目的在于克服现有技术的缺点,提供一种可开关磁轮智能焊接小车,通过驱动轮与轨道磁性相吸,能够保证焊接小车的稳定运行,简化安装程序,且焊枪不依靠电机支架驱动,使焊枪的移动更加稳定。
5.为解决上述技术问题,本实用新型采用的技术方案是:一种可开关磁轮智能焊接小车,包括焊机壳,在所述焊机壳上设置有送丝盘、送丝装置、焊枪和驱动轮,包括焊枪驱动机构和磁吸机构;
6.所述焊枪驱动机构包括焊枪驱动架、固定座和升降架,所述固定座通过直摆机构可滑动设置在所述焊机壳的前端,在所述固定座的两侧均设置有连接臂,所述焊枪驱动架通过角摆机构可转动设置在所述连接臂上,所述升降架可升降设置在所述焊枪驱动架上,所述焊枪设置在所述升降架上;
7.所述磁吸机构包括磁力座,所述磁力座用于控制所述驱动轮磁力的通入。
8.进一步的,所述直摆机构包括a螺母座和设置在所述a螺母座上的直摆杆,所述a螺母座可滑动设置在所述焊机壳内的焊机支架上,所述角摆机构设置在所述a螺母座上。
9.进一步的,所述角摆机构包括角摆固定架与依次设置的b螺母座和角摆杆,所述角摆固定架设置在所述a螺母座上,所述b螺母座可滑动设置在所述角摆固定架上。
10.进一步的,所述直摆杆和所述角摆杆均贯穿所述焊机壳的前端,所述直摆杆与所述固定座相连,在所述升降架的后端设置有后滑轨,在所述后滑轨的滑块上设置有驱动座,所述角摆杆与所述驱动座相铰接。
11.进一步的,所述磁吸机构包括依次设置的调节钮、所述磁力座和底座,所述调节钮与所述磁力座的开关相连,所述驱动轮包括通过连接轴相连的主动轮和从动轮,所述连接轴位于所述磁力座和所述底座之间,所述主动轮可转动设置。
12.进一步的,所述磁吸机构和所述驱动轮均设置有两组,所述两组磁吸机构分为a磁吸机构和b磁吸机构,所述a磁吸机构和所述b磁吸机构(41)位于所述焊机支架的两侧。
13.本实用新型具有的优点和积极效果是:
14.由于采用上述技术方案,使驱动轮通过磁性与轨道相吸,无需使驱动轮卡扣在轨道上,且磁吸机构中调节钮的设置,可控制磁力座的开关,决定磁力座是否具有磁性,仅通
过转动调节钮即可完成驱动轮与轨道的安装。
15.直摆机构可带动角摆机构共同滑动,即直摆杆带动角摆杆滑动,用以控制焊枪的前后移动,角摆机构可单独驱动,在直摆杆不动的前提下,通过角摆杆的伸出或缩进,使焊枪可绕转轴实现转动,实现轴向移动,升降架可控制焊枪的高度,本实用新型使焊枪可满足各方位的焊接。
附图说明
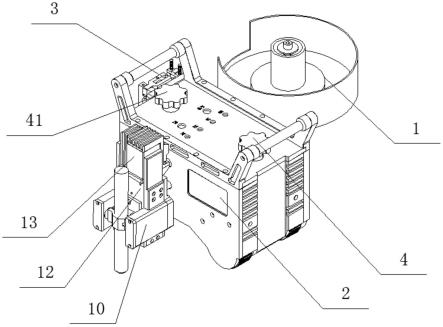
16.图1是本实用新型结构示意图;
17.图2是本实用新型磁吸机构示意图;
18.图3是本实用新型角摆机构、直摆机构示意图;
19.图4是本实用新型焊枪驱动机构示意图;
20.图5是本实用新型焊枪驱动机构爆炸视图;
21.图6是本实用新型升降架示意图;
22.图7焊枪驱动机构焊枪驱动架剖视图。
23.图中:
24.1、送丝盘;2、焊机壳;21、焊机支架;
25.3、送丝装置;
26.4、a磁吸机构;41、b磁吸机构;
27.5、调节钮;51、磁力座;52、底座;
28.6、主动轮;61、从动轮;
29.7、驱动电机;71、主齿轮;72、a从齿轮;73、b从齿轮;
30.8、移动滑轨;81、a螺母座;82、直摆电机;821、直摆丝杠;83、直摆杆;84、调节滑轨;
31.9、角摆固定板;91、角摆电机;911、角摆丝杠;92、b螺母座;93、角摆杆;
32.10、焊枪驱动架;101、转轴;102、转动槽;103、让位槽;
33.11、固定座;111、连接臂;
34.12、升降架;121、侧滑轨;122、后滑轨;123、驱动座;
35.13、升降电机;131、升降丝杠;132、升降螺母座。
具体实施方式
36.下面结合实施例和附图对本实用新型做进一步的说明。
37.如图1至图7所示,本实施例提供一种可开关磁轮智能焊接小车,包括送丝盘1、焊机壳2、送丝装置3和焊枪,送丝盘1设置在焊机壳2的后端,送丝装置3设置在焊机壳2的侧端,焊枪设置在焊机壳2的前端,在焊机壳2的下方设置有驱动轮。
38.焊枪设置在焊枪驱动机构上,焊枪驱动机构包括焊枪驱动架10、固定座11和升降架12,固定座11通过直摆机构可滑动设置在焊机壳2的前端,在固定座11的两侧均设置有连接臂111,焊枪驱动架10通过角摆机构可转动设置在连接臂111上,升降架12可升降设置在焊枪驱动架10的内侧,焊枪设置在升降架12上。
39.焊枪驱动架10呈“凹”字型,在焊枪驱动架10的两侧壁内均贯通设有转动槽102,用于使连接臂111伸入,在其后侧设有可供固定座11通过的让位槽103,固定座11配合在让位
槽103内,两个连接臂111通过转轴101分别连接在焊枪驱动架10的两侧壁内,使焊枪驱动架10可绕转轴101实现转动。
40.为实现升降架12的升降,在升降架12内可转动设置有升降丝杠131,在升降丝杠131上螺纹连接有升降螺母座132,螺母座132的一端贯穿升降架12与焊枪驱动架10的内侧相连,且在升降架12上设有可供螺母座132端部上下滑动的通槽,升降丝杆131依靠设置在升降架12上方的升降电机13驱动,在升降架12的两侧壁均设置有侧滑轨121,两个侧滑轨121的滑块均与焊枪驱动架10的内侧相连。
41.直摆机构包括直摆丝杠821、a螺母座81和直摆杆83,在焊机壳2内设置有焊机支架21,在焊机支架21的上端面设置有移动滑轨8,a螺母座81设置在移动滑轨8的滑块上,在焊机壳2内可转动设置有直摆丝杠821,直摆丝杠821与a螺母座81螺纹相连,直摆杆83设置在a螺母座81的一侧,直摆丝杠821依靠直摆电机82所驱动,直摆电机82设置在移动滑轨8的一侧,直摆电机82的输出端与直摆丝杠821的端部通过同步带相传动。
42.角摆机构设置在a螺母座81上,角摆机构包括角摆固定架9、角摆丝杠911、b螺母座92和角摆杆93,固定架9设置在a螺母座81上,角摆丝杠911可转动设置在固定架9上,b螺母座92螺纹连接在角摆丝杠911上,在移动滑轨8的滑块上设置有调节滑轨84,b螺母座92的端部与调节滑轨84的滑块相连,角摆杆93设置在b螺母座92上,角摆丝杠911依靠角摆电机91所驱动,角摆电机91设置在角摆固定板9上,角摆电机91的输出端与角摆丝杠911的端部通过同步带相传动。
43.直摆杆83与角摆杆93上下共线设置。
44.在焊机支架21上设有可供直摆杆83和角摆杆93通过的通孔,在升降架12的后端设置有后滑轨122,在后滑轨122的滑块上设置有驱动座123,驱动座123贯穿让位槽103,角摆杆93与驱动座123相铰接,直摆杆83与固定座11固定连接。
45.驱动轮通过磁吸机构与轨道磁性相吸,磁吸机构包括依次设置的调节钮5、磁力座51和底座52,调节钮5与磁力座51上的开关相连,用于控制磁力座51磁力的通入,驱动轮可转动设置在磁力座51的两侧,包括主动轮6和从动轮61,主动轮6和从动轮61通过连接轴相连,连接轴位于磁力座51与底座52之间,磁吸机构和驱动轮均设置有两组,两组磁吸机构为a磁吸机构4和b磁吸机构41,两个磁力座51分别设置在焊机支架21两侧的下端面,两个主动轮6均依靠驱动电机7所驱动,驱动电机7设置在焊机支架21的上端,在其输出端设置有a主齿轮71,在两个主动轮6的侧端均设置有a从齿轮72,在焊机支架2的侧端相对设置有两个b齿轮73,主齿轮71、a从齿轮72和b从齿轮73通过同步带相传动。
46.本实例的工作过程:
47.将本实用新型放置在轨道上,分别转动a磁吸机构4上的调节钮与b磁吸机构41上的调节钮,通过调节钮控制磁力座的开启,使磁力通入驱动轮,使主动轮6和从动轮61均具有磁性,驱动轮与轨道磁性相吸,驱动电机7启动,通过主齿轮71、a从齿轮72和b从齿轮73的相互传动,驱动两个主动轮转动,使本实用新型沿轨道运行。
48.通过直摆电机83驱动直摆丝杠821转动,使a螺母座81带动直摆杆83和角摆杆93共同沿移动滑轨8向前或向后滑动,实现焊枪的平移。
49.通过角摆电机93驱动角摆丝杠911转动,在直摆杆83不动的情况下,角摆杆93沿调节滑轨84向前或向后滑动,推动焊枪驱动架10沿转轴101向前或向后转动,实现焊枪的转
动。
50.通过升降电机13驱动升降丝杠131转动,使焊枪驱动架10沿侧滑轨121向上或向下滑动,实现焊枪的升降。
51.当完成焊接,需要取消驱动轮与轨道的连接时,反向转动a磁吸机构4上的调节钮和b磁吸机构41上的调节钮,控制磁力座的开关关闭,主动轮6和从动轮61均不具有磁性,可将本实用新型自轨道取下。
52.本实用新型的有益效果是:
53.通过使驱动轮与轨道磁性相吸,无需将驱动轮卡扣在轨道上,节省安装步骤,无需根据轨道型号的不同再度调整,适用各种轨道,且通过磁力相吸,使小车运行更加稳定,避免运行过程中产生抖动,降低焊接效果。
54.直摆机构和角摆机构的设置可控制焊枪的运行路径,且角摆机构设置在直摆机构上,a螺母座81的滑动可带动直摆杆83和角摆杆93共同向内缩进或向外伸出,角摆机构可单独驱动,在直摆杆83与固定座11固定连接的情况下,角摆杆93向外推动或向内缩进,可使焊枪驱动架10绕转轴101实现转动,相比通过电机直接驱动焊枪转动,本实用新型可使焊枪的转动更加平稳,转动角度更加圆滑,与可升降的升降架12相配合,使焊枪可满足不同的焊接路径。
55.本实用新型整体结构紧凑,减少占地面积,便于搬动与使用。
56.以上对本实用新型的一个或多个实施例进行了详细说明,但所述内容仅为本实用新型的较佳实施例,不能被认为用于限定本实用新型的实施范围。凡依本实用新型申请范围所作的均等变化与改进等,均应仍归属于本实用新型的专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1