一种风机外壳焊接工装的制作方法
1.本实用新型涉及风机焊接设备领域,具体涉及一种风机外壳焊接工装。
背景技术:
2.在风机生产过程中,焊接是常见的、重要的环节,小型企业采用人工焊接,这种方式工人劳动强度大,效率低,人工成本高。中大型企业采用的焊接机器人,焊接缺点是风机的大小不一,形式多样,旋转角度不同,尺寸也不一样,现场风机不能批量使用,焊接机器人编写的程序也无法重复使用。
技术实现要素:
3.本实用新型就是针对上述中所存在的问题,针对性地设计一种风机外壳焊接工装,使其能够沿着机壳型线移动,适用于各种尺寸的风机焊接,减轻劳动力度,提高焊接的效率。
4.为实现上述目的,本实用新型提供一种风机外壳焊接工装,包括支架、轮子夹紧装置、控制系统、焊枪固定装置和连杆组;所述轮子夹紧装置安装在支架上,包括驱动装置、传动装置、夹紧臂、轮子力矩电机、滚动体和控制开关;所述夹紧臂包括右夹紧臂和左夹紧臂;所述右夹紧臂和左夹紧臂靠近风机外壳位置均安装所述滚动体,所述轮子力矩电机与滚动体驱动连接;所述传动装置传动连接驱动装置和右夹紧臂、左夹紧臂;工作状态时,分别安装在所述右夹紧臂和左夹紧臂上的滚动体夹紧风机外壳;所述控制系统与所述轮子力矩电机通信连接;所述连杆组安装在支架上;所述焊枪固定装置安装在连杆组远离支架的一端。
5.作为优选,所述控制系统安装于支架内,所述轮子力矩电机为伺服电机,所述控制系统为plc控制器。
6.作为优选,所述连杆组包括其他连杆和最后一节连杆,所述其他连杆远离焊枪固定装置的一端与支架的上端通过螺栓螺母连接,所述连杆组的相邻连杆之间也通过螺栓螺母连接。
7.作为优选,所述传动装置为齿轮齿条结构,包括下齿条、右支撑杆、左支撑杆、上齿条、齿轮、右支撑座和左支撑座;所述滚动体包括右滚动体和左滚动体;所述驱动装置为电机且与齿轮驱动连接,所述齿轮与下齿条、上齿条啮合,所述下齿条的右端与右支撑杆一端铰接;所述右支撑杆的另一端与所述右夹紧臂的上端铰接;所述右夹紧臂的中部和右支撑座铰接;所述右夹紧臂和所述右滚动体连接;所述上齿条的左端与左支撑杆的一端铰接;所述左支撑杆另一端与所述左夹紧臂的上端铰接;所述左夹紧臂的中部和左支撑座铰接;所述左夹紧臂和所述左滚动体连接。
8.作为优选,所述控制开关安装于支架上。
9.作为优选,所述控制开关与驱动装置通信连接。
10.综上所述,本实用新型具有如下的优点和有益技术效果:
11.(1)利用本实用新型能够在焊接风机外壳与侧板的过程中,在确定焊接起点后自
动焊接,降低人工劳动成本;
12.(2)本实用新型中操控控制开关就能实现轮子夹紧装置夹紧风机外壳,并通过控制系统控制轮子力矩电机旋转,使整个焊接工装沿着风机外壳型线移动;
13.(3)通过连杆组的形状调节,使得本实用新型适用于各种尺寸的风机焊接。
附图说明
14.本实用新型的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
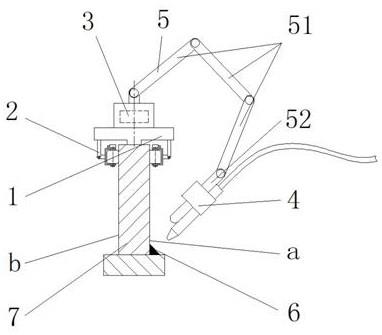
15.图1是本实用新型的一种风机外壳焊接工装的结构示意图;
16.图2是本实用新型的一种风机外壳焊接工装的轮子夹紧装置的结构示意图。
17.附图中的附图标记为:
18.1-支架;
19.2-轮子夹紧装置;21-驱动装置;22-传动装置;221-下齿条;222-右支撑杆;223-左支撑杆;224-上齿条;225-齿轮;226-右支撑座;227-左支撑座;23-夹紧臂;231-右夹紧臂;232-左夹紧臂;24-轮子力矩电机;25-滚动体;251-右滚动体;252左滚动体;26-控制开关;
20.3-控制系统;4-焊枪固定装置;
21.5-连杆组;51-其他连杆;52-最后一节连杆;
22.6-焊缝;7-风机外壳。
具体实施方式
23.以下结合附图1-2对本实用新型作进一步详细说明。
24.如图1-2所示,本实用新的一种风机外壳焊接工装,包括支架1、轮子夹紧装置2、控制系统3、焊枪固定装置4和连杆组5。
25.如图2所示,轮子夹紧装置2安装在支架1上,包括驱动装置21(本实施例中为电机)、传动装置22、夹紧臂23、轮子力矩电机24、滚动体25和控制开关26;夹紧臂23包括右夹紧臂231和左夹紧臂232。
26.如图2所示,右夹紧臂231和左夹紧臂232靠近风机外壳7位置均安装滚动体25,轮子力矩电机24与滚动体25驱动连接。
27.如图2所示,传动装置22传动连接驱动装置21和右夹紧臂231、左夹紧臂232;工作状态时,分别安装在右夹紧臂231和左夹紧臂232上的滚动体25夹紧风机外壳7。
28.如图1所示,控制系统3与轮子力矩电机24通信连接;连杆组5安装在支架1上。
29.如图1所示,焊枪固定装置4安装在连杆组5远离支架1的一端。
30.如图1所示,控制系统3安装于支架1内,轮子力矩电机24为伺服电机,控制系统3为plc控制器, plc控制器的触摸屏在支架1的外表面。
31.如图1所示,连杆组5包括其他连杆51和最后一节连杆52,其他连杆51远离焊枪固定装置4的一端与支架1的上端通过螺栓螺母连接,连杆组5的相邻连杆之间也通过螺栓螺母连接。这样在调节连杆组5时,可以将螺母拧松;在调节结束后再将螺母拧紧,这样连杆组5的形状就固定了。
32.如图2所示,传动装置22为齿轮齿条结构,包括下齿条221、右支撑杆222、左支撑杆
223、上齿条224、齿轮225、右支撑座226和左支撑座227。
33.如图2所示,滚动体25包括右滚动体251和左滚动体252。右支撑座226和左支撑座227分别与支架1内腔下表面两侧固定连接。
34.如图2所示,驱动装置21与齿轮225驱动连接,齿轮225与下齿条221、上齿条224啮合(上齿条224与支架1内腔上表面滑动连接,上齿条224宽度两侧有限位导向架,限位导向架与支架1内腔上表面固定连接),下齿条221的右端与右支撑杆222一端铰接;右支撑杆222的另一端与右夹紧臂231的上端铰接;右夹紧臂231的中部和右支撑座226铰接;右夹紧臂231和右滚动体251连接;上齿条224的左端与左支撑杆223的一端铰接;左支撑杆223另一端与左夹紧臂232的上端铰接;左夹紧臂232的中部和左支撑座227铰接;左夹紧臂232和左滚动体252连接。
35.如图1所示,控制开关26安装于支架1上。控制开关26与驱动装置21通信连接。
36.本实用新型一种风机外壳焊接工装的工作原理:风机外壳的焊接顺序是风机外壳7与一侧侧板焊接固定,再焊接另一侧侧板,假设侧板焊接的两面为a面和b面:如图1-2将本焊接工装置于风机外壳7顶部,接通电源,操控控制开关26,使驱动装置21(电机)运转,驱动齿轮225,通过齿轮225与下齿条221、上齿条224的啮合传动,带动右支撑杆222和左支撑杆223,由于右支撑座226和左支撑座227的存在,起到杠杆支点的作用,推动右夹紧臂231和左夹紧臂232向风机外壳7方向靠拢,从而滚动体25缓缓地夹紧外壳;随后操作焊枪固定装置4手动定位到焊接起点;焊接开始后,控制轮子力矩电机24运转带动滚动体25转动,实现焊接工装沿着风机外壳7型线缓慢前行,直至焊完a面;焊接b侧时,焊接工装的滚动体25和焊缝6的起点对齐,再次通手动找准与b面的焊接起点,调用焊接a面时的路线,焊完b面。
37.实施例2
38.本实施例与实施例1的区别是:驱动装置21为油缸,传动装置22采用现有技术中机械抓手的传动机构中的一种。
39.以上均为本实用新型的较佳实施例,并非依此限制本实用新型的保护范围,故:凡依本实用新型的结构、形状、原理所做的等效变化,均应涵盖于本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1