一种缸体暂存滑台的制作方法
1.本实用新型涉及缸体制造技术领域,特别涉及一种缸体暂存滑台。
背景技术:
2.汽车零部件(如缸体)经过铸造后还需要放入卧式加工中心进行精加工,为了提高加工效率,企业计划研发全自动化精加工线,该全自动化精加工线包括上料装置、下料装置、设置在上料装置和下料装置之间且沿左右延伸的搬运轨道、以及可左右移动地设置在搬运轨道上的搬运机械手;搬运轨道的前后两侧均排布有多台卧式加工中心。工作时,搬运机械手抓取上料装置上的零部件,然后搬运机械手由加工控制系统控制,移动至其中一台卧式加工中心的一旁,将该卧式加工中心中已完成加工的零部件取出,继而将待加工的零部件放入该卧式加工中心中,此时搬运机械手需将完成加工的零部件立即移送至下料装置,再返回上料装置进行上料,搬运路程远,耗时长,影响生产节拍和加工效率。
3.可见,现有技术还有待改进和提高。
技术实现要素:
4.鉴于上述现有技术的不足之处,本实用新型的目的在于提供一种缸体暂存滑台,旨在解决从卧式加工中心中取出的已完成加工的零部件必须立即搬运至下料装置的问题。
5.为了达到上述目的,本实用新型采取了以下技术方案:
6.一种缸体暂存滑台,能够暂存两种不同长度的缸体,包括滑座、设置在滑座上的接液盘、至少一个设置在接液盘上的暂存工位,每个暂存工位上设置有用于对缸体的底部进行定位的支承组件、以及用于感应缸体的第一感应组件和第二感应组件;当所述第一感应组件被响应而第二感应组件不响应时,暂存工位上设置有长度较短的缸体;当第一感应组件和第二感应组件均被响应时,暂存工位上设置有长度较长的缸体。
7.作为上述技术方案的进一步改进,所述第一感应组件包括一组第一对射传感器和用于将第一对射传感器固定在接液盘上的第一支架。
8.作为上述技术方案的进一步改进,所述第二感应组件包括一组第二对射传感器和用于将第二对射传感器固定在接液盘上的第二支架。
9.作为上述技术方案的进一步改进,所述支承组件包括第一定位销、第二定位销、以及第三定位销,第二定位销设置在第一定位销和第三定位销之间,第一定位销和第二定位销用于对长度较短的缸体进行定位,第一定位销和第三定位销用于对长度较长的缸体进行定位。
10.作为上述技术方案的进一步改进,所述第一定位销、第二定位销、第三定位销的一旁均设置有辅助支撑柱。
11.作为上述技术方案的进一步改进,所述接液盘包括底板和设置在底板边沿的上围边,位于接液盘左右两侧的上围边上开设有排液口。
12.作为上述技术方案的进一步改进,所述排液口处形成有与底板连接的下翻边。
13.作为上述技术方案的进一步改进,所述滑座包括滑板、至少一根与滑板固接的牵引臂、以及两个设置在滑板底部的支腿。
14.作为上述技术方案的进一步改进,所述暂存工位设置有两个且呈左右并列排布。
15.有益效果:
16.与现有技术相比,本实用新型提供一种缸体暂存滑台,当缸体暂存滑台上的暂存工位处于空置状态时,搬运机械手可以直接将缸体放置在暂存工位上实现缓存,当缸体暂存滑台上的暂存工位均存放有缸体并且搬运机械手也抓取有已完成加工的缸体,搬运机械手才会移动至下料装置,然后将搬运机械手上的缸体和暂存工位的缸体逐个下料,从而节省搬运移动时长,提高加工效率。当搬运机械手抓取暂存工位上的缸体时,加工控制系统根据第一感应组件和第二感应组件的信号反馈,控制搬运机械手按照指定的抓取路线运动。若所述第一感应组件被缸体触发,而第二感应组件不能感应缸体时,暂存工位上放置的是三缸缸体,搬运机械手按照三缸缸体抓取线路运动;若第一感应组件和第二感应组件均被触发时,暂存工位上放置的是四缸缸体,搬运机械手按照四缸缸体抓取线路运动,确保搬运机械手能够精确地抓取暂存工位上的缸体。
附图说明
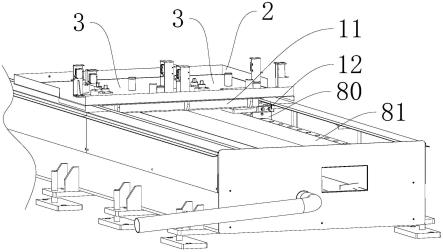
17.图1为本实用新型提供的缸体暂存滑台设置在机床上的结构示意图。
18.图2为接液盘上的暂存工位的结构示意图。
19.图3为搬运机械手牵引缸体暂存滑台移动的结构示意图。
20.图4为全自动精加工线的俯视图。
21.主要元件符号说明:1-滑座、11-滑板、12-支脚、2-接液盘、21-底板、22-上围边、23-排液口、24-下翻边、3-暂存工位、4-支承组件、41-第一定位销、42-第二定位销、43-第三定位销、44-辅助支撑柱、5-第一感应组件、51-第一对射传感器、52-第一支架、6-第二感应组件、61-第二对射传感器、62-第二支架、7-缸体、81-搬运轨道、82-搬运机械手、831-第一卧式加工中心、832-第二卧式加工中心、833-第三卧式加工中心、84-上料装置、85-下料装置、80-滑块。
具体实施方式
22.本实用新型提供一种缸体暂存滑台,为使本实用新型的目的、技术方案及效果更加清楚、明确,以下参照附图并举实施例对本实用新型进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型的保护范围。
23.请参阅图1-图3,本实用新型提供一种缸体暂存滑台,能够暂存两种不同长度的缸体7,包括滑座1、设置在滑座1上的接液盘2、至少一个设置在接液盘2上的暂存工位3,每个暂存工位3上设置有用于对缸体7的底部进行定位的支承组件4、以及用于感应缸体7的第一感应组件5和第二感应组件6;当所述第一感应组件5被响应而第二感应组件不响应时,暂存工位3上设置有长度较短的缸体7;当第一感应组件5和第二感应组件6均被响应时,暂存工位3上设置有长度较长的缸体7。
24.在实际应用中,如图1和图4所示,本实用新型提供的缸体暂存滑台通过滑块80与搬运轨道81滑动连接,缸体暂存滑台能够顺畅地在搬运轨道81上滑移;搬运轨道81上设置
有搬运机械手82,搬运机械手82在搬运轨道81的引导下左右移动,所述缸体暂存滑台与搬运机械手82连接,在搬运机械手82的驱动下,搬运机械手82和缸体暂存滑台同步移动。全自动化精加工线上的搬运轨道81沿左右延伸,搬运轨道81的左端设置有上料装置84,搬运轨道81的右端设置有下料装置85,搬运轨道81的上下两侧均排布有第一卧式加工中心831、第二卧式加工中心832、第三卧式加工中心833,第一卧式加工中心831、第二卧式加工中心832、第三卧式加工中心833均能够对两种不同长度的缸体7进行精加工,可以理解为长度较长的缸体为四缸缸体,长度较短的缸体为三缸缸体。
25.假设第一卧式加工中心831完成缸体7精加工后,搬运机械手82先朝上料装置84移动,搬运机械手82抓取上料装置84上的待加工缸体,然后移动至第一卧式加工中心831的前方,从第一卧式加工中心831中取出完成加工的缸体,随后将待加工缸体放入第一卧式加工中心831进行加工。需要说明的是,由于第一卧式加工中心831将缸体信息反馈至加工控制系统,所以搬运机械手82能够获知当前抓取的已完成加工的缸体类型,从而以对应的搬运路线将该已完成加工的缸体7准确放置在缸体暂存滑台的暂存工位3上,支承组件4对缸体7进行定位和支撑,防止缸体7在平移过程中相对缸体暂存滑台运动,从而导致搬运机械手82后续无法准确抓取缸体7,四缸缸体和三缸缸体由于长度不同,两者的放置点和搬运路线具有偏移性;可见,当缸体暂存滑台上的暂存工位3处于空置状态时,搬运机械手82可以直接将缸体7放置在暂存工位3上实现缓存,当缸体暂存滑台上的暂存工位3均存放有缸体7并且搬运机械手82也抓取有已完成加工的缸体7,搬运机械手82才会移动至下料装置85,将搬运机械手82上的缸体7和暂存工位3的缸体7逐个下料,从而节省搬运移动时长,提高加工效率。当搬运机械手82抓取暂存工位3上的缸体7时,加工控制系统根据第一感应组件5和第二感应组件6的信号反馈,控制搬运机械手82按照指定的抓取路线运动。若所述第一感应组件5被缸体触发,而第二感应组件6不能感应缸体7时,暂存工位3上放置的是三缸缸体7,搬运机械手82按照三缸缸体7抓取线路运动;若第一感应组件5和第二感应组件6均被触发时,暂存工位3上放置的是四缸缸体7,搬运机械手82按照四缸缸体7抓取线路运动。
26.同理,第二卧式加工中心832也通过上述方式实现上下料,但由于第三卧式加工中心833距离下料装置85较近,因此搬运机械手82直接从第三卧式加工中心833取出已完成加工的缸体7后,会直接将缸体7搬运至下料装置85。
27.具体的,所述第一感应组件5包括一组第一对射传感器51和用于将第一对射传感器51固定在接液盘2上的第一支架52。第一对射传感器51在非响应状态下,第一对射传感器51的发射器发出检测光线至第一对射传感器51的接收器;所有类型的缸体7均能触发第一对射传感器51,当缸体7放置在第一对射传感器51的发射器和接收器之间时,缸体7切断检测光线的传输,使第一对射传感器51处于响应状态。
28.同样的,所述第二感应组件6包括一组第二对射传感器61和用于将第二对射传感器61固定在接液盘2上的第二支架62。长度较短的三缸缸体7无法触发第二对射传感器61,当长度较长的四缸缸体7放置在第二对射传感器的发射器和接收器之间时,四缸缸体7切断检测光线的传输,第二对射传感器61处于响应状态。
29.具体的,所述支承组件4包括第一定位销41、第二定位销42、以及第三定位销43,第二定位销42设置在第一定位销41和第三定位销43之间,第一定位销41和第二定位销42用于对长度较短的缸体7进行定位,第一定位销41和第三定位销43用于对长度较长的缸体7进行
定位。
30.优选的,所述第一定位销41、第二定位销42、第三定位销43的一旁均设置有辅助支撑柱44。辅助支撑柱对缸体的底面进行支撑,维持缸体的平衡。
31.缸体7在精加工过程中,切削液持续喷淋在缸体7上,对缸体7起到冷却、润滑以及冲洗作用,所以当缸体7放置在暂存工位3上时,缸体7上的切削液滴落到接液盘2上。在本实施例中,所述接液盘2包括底板21和设置在底板21边沿的上围边22,位于接液盘2左右两侧的上围边22上开设有排液口23。上围边22对切削液进行阻挡,使切削液只能通过排液口23排出,防止切削液流落到搬运轨道81上,造成搬运轨道81污染。
32.进一步的,所述排液口23处形成有与底板21连接的下翻边24。下翻边24对切削液起到导流作用,使切削液沿着下翻边24往下滴。
33.具体的,所述滑座1包括滑板11、至少一根牵引臂、以及两个设置在滑板11底部的支脚12,两个支脚12对应相应的搬运轨道81设置,并且通过滑块与搬运轨道81滑动连接。所述牵引臂的一端与滑板11固接,另一端与搬运机械手82固接,使得搬运机械手82能够牵引缸体暂存滑台同步移动。
34.在本实施例中,所述暂存工位3设置有两个且呈左右并列排布,进一步提高的缸体暂存滑台的缓存能力。
35.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
36.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接或可以相互通讯;可以是直接连接,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
37.可以理解的是,对本领域普通技术人员来说,可以根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,而所有这些改变或替换都应属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1