超大型球弧板激光坡口切割机的制作方法
1.本实用新型涉及坡口切割机领域,具体而言,涉及超大型球弧板激光坡口切割机。
背景技术:
2.随着现代机械加工业地发展,对切割的质量、精度要求的不断提高,对提高生产效率、降低生产成本、具有高智能化的自动切割功能的要求也在提升,数控切割机的发展必须要适应现代机械加工业发展的要求,切割机分为火焰切割机、等离子切割机、激光切割机、水切割等,激光切割机为效率最快,切割精度最高,切割厚度一般较小,等离子切割机切割速度也很快,切割面有一定的斜度,火焰切割机针对于厚度较大的碳钢材质。
3.在对球弧板进行加工时,因球弧板的四边弧形,整体球形的特殊性,目前普遍采用的是人工划线,人工等离子切割的方式,效率低,准备时间长、切割精度低,切割效果差,加工人员多,是一种完全落后于企业生产需要的工艺,球弧板如有阀门开孔,还需在另外工位重新定位,再进行开工作业,所以现有的定位效果较差,在切割和钻孔的过程中就会影响加工效率。
技术实现要素:
4.为了弥补以上不足,本实用新型提供了克服上述技术问题或至少部分地解决上述问题的超大型球弧板激光坡口切割机。
5.为实现上述目的,本实用新型提供如下技术方案:
6.超大型球弧板激光坡口切割机,包括
7.主体机构,所述主体机构包括地轨,所述地轨的顶部滑动连接有支架,所述支架的顶部滑动连接有六轴工业机器人,所述六轴工业机器人的一端通过螺栓固定有切割头;
8.转动机构,所述转动机构位于地轨的表面,且与六轴工业机器人配合使用;
9.升降机构,所述升降机构位于转动机构的一侧,且与转动机构配合使用,所述升降机构的数量为两个;
10.定位机构,所述定位机构位于转动机构的内腔,所述定位机构的数量为两个,所述定位机构包括第一电机,所述第一电机通过螺栓固定安装于转动机构的内壁,所述第一电机的输出端通过连接器固定安装有电动伸缩杆,所述电动伸缩杆的输出端固定安装有定位板;
11.弧形板,所述弧形板夹持于两个定位板之间。
12.在本实用新型的实施例中,所述转动机构包括壳体,所述壳体的数量为两个,且分别固定安装于地轨的两侧,所述壳体的顶部通过螺栓固定有第二电机,所述第二电机的输出端贯穿至壳体的内腔并固定安装有尺柱,两个壳体相对的一侧转动连接有齿环,所述齿环的表面与尺柱的表面啮合,所述第一电机通过螺纹固定安装于齿环的内壁。
13.在本实用新型的实施例中,所述升降机构包括盒体,所述盒体固定安装于壳体的一侧,所述盒体的内壁通过螺栓固定安装有第三电机,所述第三电机的输出端固定安装有
螺纹杆,所述螺纹杆的表面螺纹连接有螺纹套,所述螺纹套的一侧固定安装有连接块,所述连接块的一侧贯穿至盒体的外侧,所述连接块的一侧固定安装有活动板,所述活动板滑动连接于壳体的一侧,所述齿环转动连接于活动板的内腔,所述齿环的底部开设有凹槽,所述活动板的内壁固定安装有与凹槽配合使用的滑轮,所述滑轮位于凹槽的内腔。
14.在本实用新型的实施例中,所述尺柱的底部固定安装有活动杆,所述活动杆的表面固定安装有轴承,所述轴承外圈的表面固定安装与壳体的内壁。
15.在本实用新型的实施例中,所述活动板的顶部开设有活动槽,所述活动槽与尺柱配合使用。
16.在本实用新型的实施例中,所述活动板的一侧固定安装有燕尾块,所述燕尾块的数量为两个,所述壳体的一侧开设有与燕尾块配合使用的燕尾槽。
17.在本实用新型的实施例中,所述螺纹套的一侧固定安装有滑块,所述盒体的内壁开设有与滑块配合使用的滑槽。
18.在本实用新型的实施例中,所述盒体的一侧开设有活动孔,所述活动孔的内壁与连接块的表面配合使用。
19.在本实用新型的实施例中,所述定位板的一侧固定安装有自适应定位垫,所述自适应定位垫的表面与弧形板的表面接触。
20.在本实用新型的实施例中,所述自适应定位垫为橡胶材质制成。
21.本实用新型提供的超大型球弧板激光坡口切割机,其有益效果包括有:
22.1、通过设置转动机构,能够使弧形板在被定位的过程中可进行转动,从而可使六轴工业机器人在对齿板加工时更加的灵活,增加了加工的效率。
23.2、通过设置升降机构,能够调节被定位后弧形板的高度,从而可使弧形板的高度适合六轴工业机器人的加工位置,使六轴工业机器人在对其加工的过程中更加的灵活稳定。
24.3、通过设置定位机构,能够达到了对定位板进行定位的目的,使用者在定位弧形板的过程中更加的便捷,同时在对弧形板进行定位的过程中也不会导致弧形板的表面被破坏。
25.4、通过设置定位机构、转动机构和升降机构的配合使用,能够通过与六轴工业机器人的配合使用即可对齿板的表面进行立体加工,在加工的过程中增加了加工的效率,同时在加工的过程中减少了人工的工作强度。
附图说明
26.为了更清楚地说明本实用新型实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
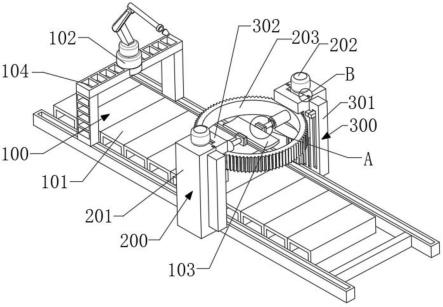
27.图1是本实用新型实施方式提供的立体图;
28.图2为本实用新型实施方式提供的图1中a处的局部放大图;
29.图3为本实用新型实施方式提供的图1中b处的局部放大图;
30.图4为本实用新型实施方式提供的局部结构的剖视图;
31.图5为本实用新型实施方式提供的局部结构的第一立体图;
32.图6为本实用新型实施方式提供的局部结构的第二立体图。
33.图中:100、主体机构;101、地轨;102、六轴工业机器人;103、弧形板;104、支架;200、转动机构;201、壳体;202、第二电机;203、齿环;204、尺柱;205、活动杆;206、轴承;300、升降机构;301、盒体;302、活动板;303、活动槽;304、燕尾块;305、燕尾槽;306、第三电机;307、螺纹套;308、螺纹杆;309、滑块;310、滑槽;311、活动孔;312、连接块;400、定位机构;401、电动伸缩杆;402、定位板;403、自适应定位垫;404、第一电机。
具体实施方式
34.为使本实用新型实施方式的目的、技术方案和优点更加清楚,下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本实用新型一部分实施方式,而不是全部的实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
35.实施例
36.请参阅图1-6,本实用新型提供技术方案:超大型球弧板激光坡口切割机,包括主体机构100、转动机构200、升降机构300和定位机构400,主体机构100用于切割弧形板103,转动机构200用于带动弧形板103转动,升降机构300用于调节弧形板103的高度,定位机构400用于定位弧形板103;
37.主体机构100包括地轨101,地轨101的顶部滑动连接有支架104,支架104的顶部滑动连接有六轴工业机器人102,六轴工业机器人102的一端通过螺栓固定有切割头;
38.转动机构200位于地轨101的表面,且与六轴工业机器人102配合使用;
39.升降机构300位于转动机构200的一侧,且与转动机构200配合使用,升降机构300的数量为两个;
40.定位机构400,定位机构400位于转动机构200的内腔,定位机构400的数量为两个,定位机构400包括第一电机404,第一电机404通过螺栓固定安装于转动机构200的内壁,第一电机404的输出端通过连接器固定安装有电动伸缩杆401,电动伸缩杆401的输出端固定安装有定位板402,通过设置定位机构400,能够达到了对定位板402进行定位的目的,使用者在定位弧形板103的过程中更加的便捷,同时在对弧形板103进行定位的过程中也不会导致弧形板103的表面被破坏;
41.弧形板103,弧形板103夹持于两个定位板402之间。
42.转动机构200包括壳体201,壳体201的数量为两个,且分别固定安装于地轨101的两侧,壳体201的顶部通过螺栓固定有第二电机202,第二电机202的输出端贯穿至壳体201的内腔并固定安装有尺柱204,两个壳体201相对的一侧转动连接有齿环203,齿环203的表面与尺柱204的表面啮合,第一电机404通过螺纹固定安装于齿环203的内壁,通过设置转动机构200,能够使弧形板103在被定位的过程中可进行转动,从而可使六轴工业机器人102在对齿板加工时更加的灵活,增加了加工的效率;
43.尺柱204的底部固定安装有活动杆205,活动杆205的表面固定安装有轴承206,通过设置活动杆205和轴承206的配合使用,能够使尺柱204在转动的过程中更加的稳定,避免
尺柱204发生偏斜的现象,轴承206外圈的表面固定安装与壳体201的内壁。
44.升降机构300包括盒体301,盒体301固定安装于壳体201的一侧,盒体301的内壁通过螺栓固定安装有第三电机306,第三电机306的输出端固定安装有螺纹杆308,螺纹杆308的表面螺纹连接有螺纹套307,螺纹套307的一侧固定安装有连接块312,连接块312的一侧贯穿至盒体301的外侧,连接块312的一侧固定安装有活动板302,活动板302滑动连接于壳体201的一侧,齿环203转动连接于活动板302的内腔,齿环203的底部开设有凹槽,活动板302的内壁固定安装有与凹槽配合使用的滑轮,滑轮位于凹槽的内腔,通过设置升降机构300,能够调节被定位后弧形板103的高度,从而可使弧形板103的高度适合六轴工业机器人102的加工位置,使六轴工业机器人102在对其加工的过程中更加的灵活稳定;
45.活动板302的顶部开设有活动槽303,活动槽303与尺柱204配合使用,活动板302的一侧固定安装有燕尾块304,燕尾块304的数量为两个,壳体201的一侧开设有与燕尾块304配合使用的燕尾槽305,通过设置燕尾块304和燕尾槽305的配合使用,能够使活动板302在移动的过程中更加的稳定,使其不会发生偏斜和掉落的现象,螺纹套307的一侧固定安装有滑块309,盒体301的内壁开设有与滑块309配合使用的滑槽310,通过设置滑块309和滑槽310的配合使用,能够使螺纹套307在移动的过程中不会发生偏斜的现象,盒体301的一侧开设有活动孔311,活动孔311的内壁与连接块312的表面配合使用。
46.其中,定位板402的一侧固定安装有自适应定位垫403,自适应定位垫403的表面与弧形板103的表面接触,自适应定位垫403为橡胶材质制成,通过设置自适应定位垫403,能够在对弧形板103进行定位的过程中,能够适应不同弧度的弧形板103,同时在对弧形板103定位的过程中可防止弧形板103被夹形变。
47.地轨101、六轴工业机器人102、第一电机404、第二电机202、第三电机306和电动伸缩杆401均通过plc编程控制器控制,且地轨101、六轴工业机器人102、第一电机404、第二电机202、第三电机306和电动伸缩杆401均通过外接电源供电。
48.具体的,该超大型球弧板激光坡口切割机的工作过程或工作原理:使用时,在使用对弧形板103进行切割时,使用者将弧形板103放置到两个定位板402之间,通过plc编程控制器控制电动伸缩杆401,使电动伸缩杆401带动定位板402移动,定位板402的移动带动自适应定位垫403移动,使自适应定位垫403与弧形板103接触,从而可对弧形板103夹持,达到了对定位板402进行定位的目的,使用者在定位弧形板103的过程中更加的便捷,同时在对弧形板103进行定位的过程中也不会导致弧形板103的表面被破坏,同时增加稳定性,在对弧形板103定位过后,六轴工业机器人102通过地轨101移动,使其能够前后左右进行移动,从而可使六轴工业机器人102移动到需要的位置,然后通过六轴工业机器人102对弧形板103进行立体切割,在切割的过程中,利用plc编程控制器控制第一电机404、第二电机202、第三电机306和电动伸缩杆401进行运转,第一电机404的运转带动电动伸缩杆401进行循环转动,电动伸缩杆401的转动带动定位板402转动,从而可带动弧形板103进行转动,第二电机202的运转带动尺柱204进行转动,尺柱204的转动带动齿环203进行转动,从而可使齿环203通过滑轮和凹槽进行转动,齿环203在转动的过程中即可带动弧形板103进行转动,第三电机306的运转带动带动螺纹杆308进行转动,螺纹杆308的转动带动螺纹套307进行转动,螺纹套307的转动带动连接块312移动移动,同时带动滑块309在滑槽310的内腔进行移动,连接块312的移动带动活动板302移动,由于尺柱204和齿环203为啮合连接,活动板302的移
动即可带动齿环203进行上下移动,从而可带动弧形板103进行上下移动,在对齿板切割和钻孔的过程中,可通过plc编程控制器控制第一电机404、第二电机202、第三电机306和电动伸缩杆401根据事先编好的程序进行运转,从而可使齿板能够转动到任意角度,通过与六轴工业机器人102的配合使用即可对齿板的表面进行立体加工,在加工的过程中增加了加工的效率,同时在加工的过程中减少了人工的工作强度。
49.需要说明的是,地轨101、六轴工业机器人102、第二电机202、第三电机306、电动伸缩杆401和第一电机404为现有技术存在的装置或设备,或者为现有技术可实现的装置或设备,其供电、具体组成及其原理对本领域技术人员来说是清楚的,故不再详细赘述。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1